目标脱靶方位识别的修正方法*
2017-11-20刘少波
刘少波
(1.中国航天科工集团 第二研究院,北京 100854;2.北京电子工程总体研究所,北京 100854)
☞导弹技术
目标脱靶方位识别的修正方法*
刘少波1,2
(1.中国航天科工集团 第二研究院,北京 100854;2.北京电子工程总体研究所,北京 100854)
针对传统的目标脱靶方位识别的近似方法在弹目交会末端的误差较大,对该识别方法提出修正,得到精确方法,通过算例可以验证修正方法的正确性。修正方法的误差主要来源于数值计算的舍入误差,相对于传统的识别方法没有增大很多的计算复杂度,但精度得到了很大的提高。当在弹目交会末端,采用修正方法来对目标脱靶方位识别能很大程度上为引战配合设计提供更为良好的条件。
相控阵雷达导引头;脱靶方位;修正;引战配合;飞散角;弹目交会
0 引言
文献[1]提出了一种利用导引头天线测量的视线角速度分量在遭遇前识别目标脱靶方位的原理,给出了识别脱靶方位的数学表达式,并对此方法进行了数字仿真研究,获得了较好的结果,初步证明该原理可行,精度上可满足引战配合要求,该原理在工程上也得到了应用。文献[2]再次对该算例进行了仿真,从文献[1-2]的仿真结果看,对目标的脱靶方位识别随着弹目距离的减小而误差增大,当弹目距离小于100 m时,估计精度开始急剧下降;其他多篇文献[3-6]引用了文献[1]的结论,进行了进一步的研究。
在弹目交会末段,视线角速度高达100 (°)/s以上[7],采用伺服机构的天线扫描系统很难适应,而电扫描天线是容易实现高速跟踪的。因此对于采用相控阵雷达的导引头,由于采用数字电子式控制扫描技术,在弹目交会末段,仍能继续跟踪目标,若采用文献[1]的方法继续识别脱靶方位,误差会很大。本文针对此识别方法进行修正,提高识别精度。
1 理论目标脱靶方位计算[8-11]
如图1,在弹体坐标系[12]Oxmymzm下,设弹目交会时目标的初始位置为T(x0,y0,z0);由于弹目交会时间很短,可以认为相对速度矢量是常矢量;目标轨迹与Oymzm平面交点为B;弹体坐标系到相对速度坐标系的转换矩阵[13]为E=(Eij),i=1,2,3;j=1,2,3,于是相对速度在弹体坐标系下的表示为
(1)
则任意时刻t的目标坐标为
(2)

则
(3)

图1 弹体坐标系下弹目交会示意图Fig.1 Missile-target encounter trajectory phase
2 识别方法1原理
文献[1]提出,对于外框为高低轴框,内框为方位轴框,天线的指向转角次序为先方位角后高低角,且2个框架非捷联的导引头框架结构,2个框架角速度[1]为
(4)
(5)
根据结论[1]:弹体坐标系中的脱靶方位矢量总与视线角速度矢量在Oymzm平面上的投影ωm是相互垂直,且脱靶方位总是与ωm迟后90°,所以目标脱靶方位角为

(6)
下面证明式(6)是近似结果。将式(4),(5)代入式(6)右端得到

(7)
当脱靶量ρ较小,而R较大时,可以认为R与vr平行。
于是有
则式(7)化简为
(8)
通过以上推导可以得出,式是近似公式,仅在R与vr近似平行时适用。
3 识别方法2原理
如图2,文献[1]得到上述结果的原因为:认为视线角速度在弹体坐标系下的投影分量为
(9)

于是实际的视线角速度为
(10)
式中:

于是

(11)
对分子进行化简,
xz(xvrxm+yvrym+zvrzm)-xyzvrym-
xvrzm(x2+y2+z2)+zy2vrxm=
(x2+y2)(zvrxm-xvrzm),
(12)
所以
(13)
对视线角速度进行修正之后,利用公式
(14)
识别的目标脱靶方位是精确结果。这里同时也证明了第2节提到的结论。
4 战斗部动态破片中心飞散角求解[14-15]
4.1弹体坐标系下的动态破片中心飞散角
设战斗部的破片静态飞散中心角为90°,动态飞散速度矢量为v0r,静态飞散方位角为γ的破片和目标相交,于是与目标相交的破片的静态飞散速度矢量v0和动态飞散速度矢量v0r在弹体坐标系下表示分别为
则破片在弹体坐标系下的动态飞散中心角为
(15)
4.2相对速度坐标系下的动态破片中心飞散角
在相对速度坐标系下的静态飞散中心角ψs满足:

(16)
其次,在相对速度坐标系下静态飞散角ψs和动态飞散角ψd有如下关系[14]:
(17)
于是
(18)
将式(16)代入式(18)就得到γ和ψd的关系,为了进一步得到相对速度坐标系下的脱靶方位θ和ψd的关系,下面研究如何利用γ得到θ。
如图1,OB和vr的夹角为ψs,所以
又OB在相对速度系可以表示为
于是

(19)
根据式(16),(18)和(19)就可以得到θ和ψd的关系。
5 仿真校验
利用文献[1]的仿真算例校验修正公式的正确性,弹目遭遇点交会参数如表1所示。

表1 交会参数Table 1 Parameter of encounter
遭遇段起始距离R=1 000 m,脱靶参数:ρ=10 m,θ=45°,根据式(3)可以得出理论的脱靶方位角为γ=42.223 7° ,根据式(6)和(14)得到2种识别方法结果如图3,误差曲线如图4,可以看出修正后的识别方法误差很小(主要是数值计算的舍入误差),几乎可以忽略。

图3 2种识别方法对比Fig.3 Comparison of two methods
设战斗部破片的初速度为v0=2 000 m/s,静态飞散中心角为φ0=90°,静态飞散角宽度Δφ=30°,可以得到在弹体坐标系下战斗部破片动态飞散角随方位角变化如图5。根据识别的方法2得到的γ代入式(15),得到在弹体坐标系下对应脱靶方位的破片动态飞散中心角为125.637 5°。
在相对速度坐标系下战斗部破片动态飞散角随方位角变化如图6。根据识别方法2得到的γ代入式(19)得出θ=45.050 6°,识别出的结果和设定的脱靶方位相差无几,再代入式(16),(18)得到在相对速度坐标系下对应脱靶方位的破片动态飞散中心角为52.782 3°。

图5 弹体系中战斗部破片动态飞散角与方位角ω的关系Fig.5 Azimuth in missile coordinate system vs dynamic dispersion azimuth of warhead fragment
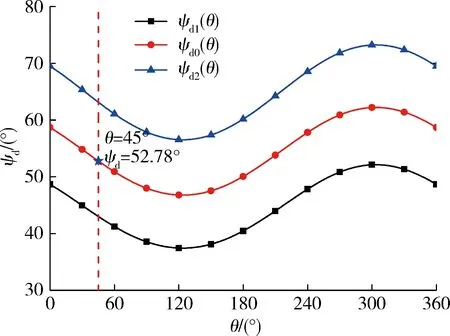
图6 相对速度系中战斗部破片动态飞散角与脱靶方位角θ的关系Fig.6 Miss azimuth in relative velocity coordinate system vs dynamic dispersion azimuth of warhead fragment
6 结束语
本文通过对文献[1]中的识别方法的视线角速度公式进行了修正,得到了识别目标脱靶方位的精确结果。利用修正后的方法进行目标脱靶方位识别能大大提高弹目交会末段的精度,为引战配合设计提供更为良好的条件。
本文还得到了弹体坐标系下的目标脱靶方位γ和相对速度坐标系下的目标脱靶方位θ的关系,因此利用识别得到的目标在弹体坐标系下脱靶方位γ通过计算还得到如下参数:
(1) 目标在相对速度坐标系下脱靶方位θ;
(2) 弹体坐标系下与目标脱靶方位γ对应的动态破片中心飞散角Ω0;
(3) 相对速度坐标系下与目标脱靶方位θ对应的动态破片中心飞散角ψd0。
[1] 张志鸿.目标脱靶方向的识别[J].制导与引信,1994(4):16-21.
ZHANG Zhi-hong.Identification of Target Miss Azimuth[J].Guidance and Fuze,1994(4):16-21.
[2] 王正杰,童春霞,邹静涛.利用导引头信息实现目标脱靶方位识别[J].北京理工大学学报,2004,24(6):496-499.
WANG Zheng-jie,TONG Chun-xia,ZOU Jing-tao.Identification of the Target Miss in Azimuth Utilizing Information from Seeker[J].Transactions of Beijing Institute of Technology,2004,24(6):496-499.
[3] 张斌.引战配合动态仿真计算软件[J].现代防御技 术,1998,26(2):27-31.
ZHANG Bin.Fuze-Warhead Matching Dynamic Simulation Software[J].Modern Defence Technology,1998,26(2):27-31.
[4] 陈潜.近炸引信弹上信息综合利用起爆控制技术[J].制导与引信,2001,22(4):30-33.
CHEN Qian.Detonation Control Technology with Information from Proximity Fuze[J].Guidance and Fuze,2001,22(4):30-33.
[5] 张东洋,任宏滨,简金蕾.引信与导引头一体化技术研究[J].制导与引信,2002,23(1):17-21.
ZHANG Dong-yang,REN Hong-bin,JIAN Jin-lei.Study of the Integrated Design Technique on Fuze and Seeker[J].Guidance and Fuze,2002,23(1):17-21.
[6] 韩明,简金蕾,任宏滨.地面防空导弹引战配合数字仿真研究[J].现代防御技术,2008,36(2):39-43.
HANG Ming,JIAN Jin-lei,REN Hong-bin.Digital Simulation of a Certain Missile Fuze Warhead Matching[J].Modern Defence Technology,2008,36(2):39-43.
[7] 简金蕾,李静,任宏斌,等.基于相控阵天线的引信与导引头一体化设计[J].飞航导弹,2011(1):85-89.
JIAN Jin-lei,LI Jing,REN Hong-bin,et al.Integrated Design Technique Fuze and Seeker Based on Phased Array[J].Winged Missile Journal,2011(1):85-89.
[8] 冯春环,丁学飞,张红旗.一种可识别脱靶方位脉冲多普勒引信技术[J].航空兵器,2012(2):55-57.
FENG Chun-huan,DING Xue-fei,ZHANG Hong-qi.A Miss Azimuth Identification Method for Pulse-Doppler Fuze[J].Aero Weaponry,2012(2):55-57.
[9] 简金蕾,李静,任宏滨.基于去偏转换测量卡尔曼滤波的目标脱靶方向角识别[J].航天控制,2010,28(6):23-28,32.
JIAN Jin-lei,LI Jing,REN Hong-bin.Measurement Adaptive Kalman Filtering Algorithm with Debasing[J].Aerospace Control,2010,28(6):23-28,32.
[10] 韩路杰 ,崔少辉.利用导引头信息测量脱靶量的方法[J].系统工程与电子技术,2014,36(4):734-739.
HAN Lu-jie,CUI Shao-hui.Method of Miss Distance Measurement Using Data of Seeker[J].Systems Engineering and Electronics,2014,36(4):734-739.
[11] 刘剑锋,庄志洪.利用导引头测角信息进行遭遇段剩余飞行时间估计的算法[J].兵工学报,2006,27(1):27-31.
LIU Jian-feng ,ZHUANG Zhi-hong.The Algorithm of Time-to-Go Using Angle Information Provided by Seeker During Missile-Target Encounter[J].Acta Armam,2006,27(1):27-31.
[12] 钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2008.
QIAN Xing-fang,LIN Rui-xiong,ZHAO Ya-nan.Missile Flight Dynamics[M].Beijing:Beijing Institute of Technology Press,2008.
[13] 梁棠文.防空导弹引信设计及仿真技术[M].北京:宇航出版社,1995.
LIANG Tang-wen.Design and Simulation Technology of Air-Defense Missile Fuze[M].Beijing:China Astronautic Publishing House,1995.
[14] 张志鸿,周申生.防空导弹引信与战斗部配合效率和战斗部设计[M].北京:宇航出版社,1994.
ZHANG Zhi-hong,ZHOU Shen-sheng.Fuse-Warhead Coordination Efficiency of Anti-Aircraft Missile and Design of Warhead[M]. Beijing:China Astronautics Publishing House,1994.
[15] 王树林,王永孝,段江红,等.基于定角引信的相对脱靶方位识别技术[J].制导与引信,2006,27(1):26-29.
WANG Shu-lin,WANG Yong-xiao,DUAN Jiang-hong,et al.Identifying Technology of Relative Miss Azimuth Based on the Fuze of Fixed Angle[J].Guidance and Fuze,2006,27(1):26-29.
AdjustMethodforIdentificationofTargetMissAzimuth
LIU Shao-bo1,2
(1.The Second Academy of CASIC,Beijing 100854,China;2.Beijing Institute of Electronic System Engineering,Beijing 100854,China)
A traditional method for identification of target miss azimuth is proposed with great error in the endgames. The method is adjusted and an exact model for identification of target miss azimuth is proposed. The adjusted method is verified by simulation example. The main error of the adjust method is rounding error of numerical calculation. Compared with traditional identification methods, the adjusted method not only improves the accuracy significant of calculating,but also not much increases computational complexity. In the endgames, the adjusted method for identification of target miss azimuth can improve efficiency of the coordination of fuze and warhead largely.
phased array radar seeker; target miss azimuth; adjust; fuze and warhead coordination; dispersion angle; missile-target encounter
2016-11-21;
2017-01-03
有
刘少波(1994-),男,江西余干人。硕士生,主要研究方向为飞行器总体设计。
通信地址:100854 北京142信箱30分箱E-mail:1120113088@bit.edu.cn
10.3969/j.issn.1009-086x.2017.05.005
TJ760.1;TJ765.3+31
A
1009-086X(2017)-05-0024-05
