分布式火箭炮控制系统研究*
2017-11-09张建新
张建新
(湖北江山重工有限责任公司,湖北襄阳 441057)
分布式火箭炮控制系统研究*
张建新
(湖北江山重工有限责任公司,湖北襄阳 441057)
火箭炮自动化程度越来越高,其控制系统越来越复杂。为了降低单体复杂性,提高系统配置的灵活性,提高模块化水平,从而有效提升产品的可靠性、维修性、测试性,设计了分布式火箭炮控制系统。文中采用自顶向下的原理和系统工程方法,对分布式系统的目标功能、体系架构、消息机制进行了研究。针对火箭炮的特点,拟定了通信协议,提出了分布式节点设计思路。经过研制分布式节点和系统试验,表明该设计能够满足需求,运行可靠。
火箭炮;CAN总线;MilCAN;控制系统;分布式控制
0 引言
基于总线的控制系统发展很快,特别在武器装备中的应用很多。基于CAN总线的MilCAN高层协议,已经应用在装甲车配电系统中[1]。关于MilCAN性能分析的消息及其机制、总线同步和配置[2-3]的研究已经成熟。在分布式控制网络中,基于CAN网络拓扑结构及应用协议也成为主流技术[4]。基于MilCAN总线的总线主控节点设计方案[5]以及分布式控制系统应用[6]都成功应用于型号。
火箭炮控制系统是火箭炮的有机组成部分,是实现火箭炮的供配电、电气控制、火力控制、安全联锁等功能的电子信息系统。一直以来,火箭炮控制系统存在单体结构复杂,系统可靠性不高,维修检测不方便,系统电磁兼容性不好等问题。为此,设计一种分布式控制系统,以满足火箭炮发展需要。
1 CAN总线介绍
1.1 CAN总线
CAN总线是一种多主串行数据通信总线,通信速率可达1 Mbit/s,通信功能均由CAN控制器管理与执行。CAN总线数据以报文为单位传送,按报文标识符设置的优先级进行数据交换。
CAN接口协议已经发展到2.0B。该协议为扩展模式,采用双验收滤波器机制。通讯协议兼容点对点、一对多及广播通讯模式。在总线中传送的报文,如表1所示。CAN2.0B扩展帧报文格式如图1所示,每帧由13 B组成,标识符(ID)长度为29 bit,数据64 bit。报文帧头中,帧格式IDE为1,表示扩展帧;帧类型RTR为0,表示数据帧;保留位R1,R0默认为0;数据长度代码DLC表示使用的数据字节数,如0010表示数据帧信息包含数据字节为2个。
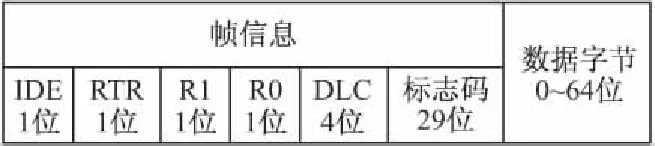
图1 CAN2.0B扩展协议帧报文信息
应用CAN协议需要对29 bit标识符重新定义,即形成应用层通信协议。
1.2 MilCAN总线
由于CAN协议采用多主结构,即无主控端,任何节点可在总线空闲时主动向总线发送消息,虽然有总线仲裁与调度,但客观上造成了消息无确定响应时间,特殊情况下不能满足实时性要求。为此,便产生了MilCAN协议,它采用主从结构,但主控端只是起同步作用,不参与触发和控制消息,这样保证了每个消息有确定的响应时间,系统实时性好。当主控端退出工作后,其余节点可通过“选举”成为主控端,从而保证系统的可靠性。
MilCAN总线在CAN2.0B基础上,进行协议改进,主要是对29 bit标志符的重新定义,它们的定义如图2所示。MilCAN协议是基于SAE1939的ID格式,两种格式可以用于同一总线(如MilCAN选择250 Kbit/s),用第25位区分不同协议[1]。

图2 MilCAN标志符格式
对ID格式说明如下:
源地址域。第0位到第7位为发送节点唯一的源地址,保证了能够识别信息的发送方。
消息主类型、消息子类型。第16位到第23位为消息主类型域,第8位到第5位为消息子类型域。
请求位。第24位表示帧是请求消息(1),还是状态/命令消息(0)。
协议类型位。第25位表示消息是MilCAN消息(1),还是SAEJ1939消息(0)。
优先级。第26位到第28位为消息的优先级。
2 系统体系架构
2.1 目标
系统将能够实现共享资源、综合利用系统信息、系统集成与控制数字化、关键功能降级、硬件模块化、通过软件实现系统功能的重构、嵌入故障诊断和综合检测功能。同时,能够灵活配置,方便升级和提升检测维修水平,降低硬件的复杂性,系统的各个执行功能信息不应驻留在一个任务处理部件之中,而是以分别执行的方式分布在它们之间,这就是采用分布式控制工作模式的思想和目标,如图3所示。
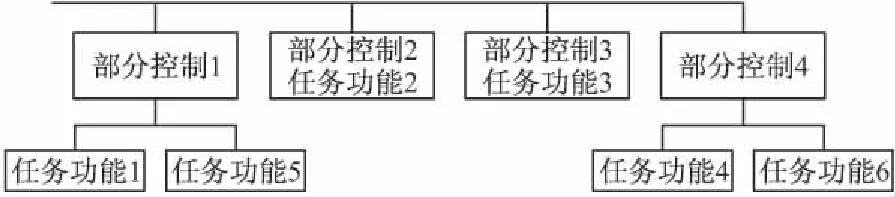
图3 分布式控制逻辑
2.2 系统功能
根据当今火箭炮的主流作战使用要求和技术发展,系统功能将定位于:
1)能够完成系统使用操作、信息传输操作及显控功能;
2)能够使系统各传感器和单体设备的信息数字化,方便通过软件实现信息融合和处理;
3)能够接收指挥信息和发送状态信息,并通过软件完成信息处理;
4)能够安全可靠的实现信息装定和发火等火力控制任务,互锁检测和发火功能;
5)能够安全可靠的实现调炮等操瞄控制功能,系统分布式监控操瞄状态信息;
6)能够在各项功能执行过程中起到安全联锁控制功能,防止功能交叠,保护人员和设备安全;
7)能够嵌入在线监测软件,实现在线监测和故障诊断功能;
8)能够实现系统供配电管理功能,有序安全的为设备分配电源。
2.3 系统结构
根据设定的目标和系统执行功能任务,按照分布式逻辑思想指导,规划出具体的子功能系统,主要包括:操作控制终端、指挥子系统、发控子系统、操瞄子系统、联锁控制子系统、定位导航子系统、电源子系统等。设计的系统体系结构如图4所示。
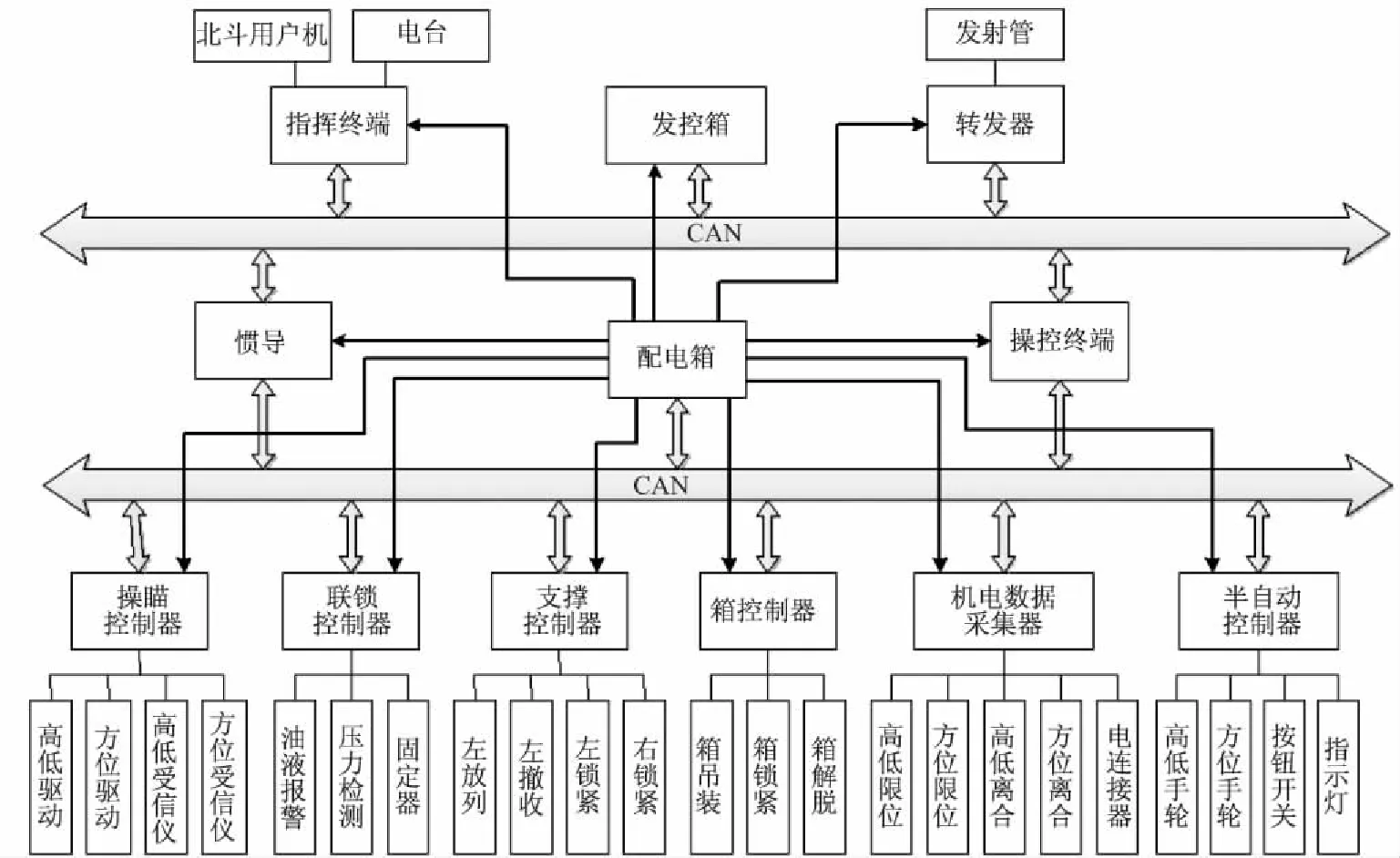
图4 系统体系架构
该分布式系统依赖于两条CAN总线,这两条CAN总线贯穿于炮车,其中一条是发控总线,一条是电气控制总线,两条总线信息之间通过操控终端交互。
3 消息机制与协议
3.1 消息类型
1)命令消息:命令消息是系统正常工作时的主要消息类型,可以是周期或者是事件触发的。
2)请求消息:请求消息用于请求特定的消息类型的发送,请求位(第24位)应置1,不能包含任何数据位。
3)请求响应消息:节点接收到请求信息后作出的响应,包括相应消息主类型、消息子类型,并将请求位值置0。
4)非操作消息:使用消息主类型值0x31;子类型表示目的节点的地址,如果为0x00则表示该消息为广播。
5)同步帧消息:由当前的同步主控节点产生,用于同步各节点信息发送。
6)系统配置模式消息:该消息分为进人配置模式和退出配置模式两种消息。
7)节点存活消息:包含节点全部状态的数据,确认该节点的健康状态。
3.2 通信过程
在分布式网络中,第一条总线通信主要包括操控终端与4个控制节点之间的通信,第二条总线通信主要包括操控终端与8个控制节点之间的通信,以及控制节点之间的通信。通信过程包括5个基本过程。
1)控制过程:包括4类消息,即命令节点初始化、参数的传送、系统配置、请求故障等消息,均为带返回的消息序列。
2)命令过程:包括2类消息,即命令消息和请求返回消息。实现操瞄、发控等功能命令,节点收到每条命令均需返回请求返回消息。
3)查询过程:包括1类消息,即命令消息。进行操瞄、发控、联锁、配电等信息的查询,采用事件触发方式。节点收到查询命令,按照应用协议返回查询状态。
4)状态上传过程:包括1类消息,即节点存活消息,周期上传。
3.3 消息流程
按照顶层设计的方法,分析系统各个功能组成部分对消息的需求,将这些消息编制成文件,然后进行信息综合,从而设计总线数据信息流。然后根据消息产生和传输消耗的时间,安排操作的先后次序。依据功能所需的时间以及逻辑所允许的最大和最小时间间隔来确定消息传输的周期,并排定一个周期中传输发生的次数和相位。这个安排用消息频率表表示,也是总线时序表,如表1所示。
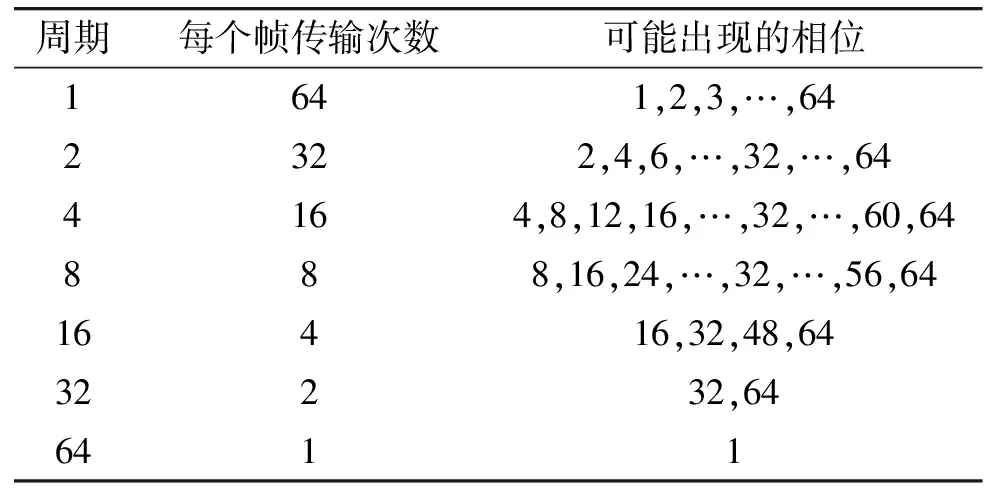
表1 消息频率表
3.4 任务消息调度管理
把任务划分成N个小任务。每个小任务有各自对应的任务控制与调度任务(TCS),负责总线上信息传输的过程和数值处理或计算的过程,在每个周期中重复迭代,称为同步控制调度方法,如图5所示。
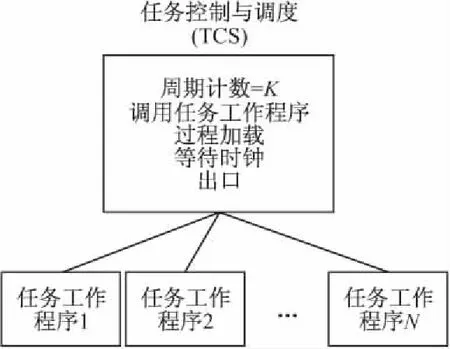
图5 同步控制调度方法
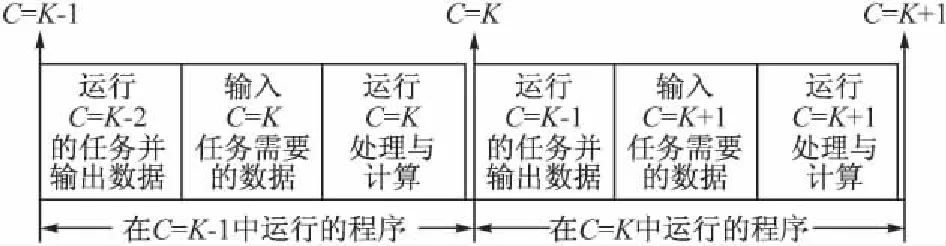
图6 同步消息传输时间刻度
将同步控制调度方法以时间轴展开,形成同步消息传输的时间刻度,如图6所示,以3个典型周期(K-1,K,K+1)为例的调度过程。C表示周期计数。
3.5 控制模式
根据系统工作特点,以及网络信息的触发方式,系统信息控制将分为两大类,一类是与操作显示有关的控制,一类是与传感反馈有关的信息。综合系统的信息特点和使用模式,将划分操作控制模式、节点控制模式。
1)操作控制模式
操作控制模式的核心是操控终端,如图7所示。操作者通过操控终端的操作面板发出控制指令,操控终端将指令发往CAN总线,节点n收到指令后输出控制信号,驱动执行机构工作。同时节点n将设备的工作参数和状态再通过CAN总线返回给操控终端进行动态显示。
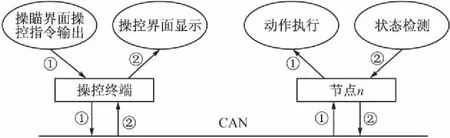
图7 操作控制模式图
2)节点控制模式
节点控制模式的核心按照功能不同,分为操瞄、发控、联锁、配电、指挥等不同的中心,各个中心节点与其它相关节点间进行信息交互,完成信息采集后,实施控制,如图8所示。当节点n检测到外界输入触发信息时,驱动执行机构执行动作i,当需要其它节点控制设备工作时,再将控制指令通过CAN总线传给节点m,进而执行动作j。它们的动作信息及动作执行后设备的工作参数通过CAN总线上传给操控终端进行显示。
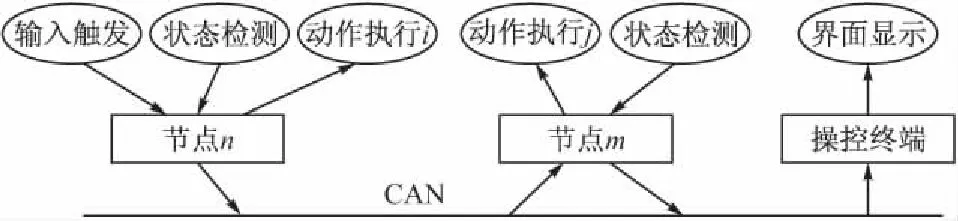
图8 节点控制模式图
4 应用设计
4.1 应用协议
根据MilCAN协议标识符格式(见图2),设计应用层协议(其中每位用字母b代替),这里给出CAN1的应用协议:
报文源地址b7~b0:按位编码,赋予每个单体;
子类型b15~b8:高位复制主类型码,低位是子类型码;
主类型b23~b16:8类主类型,高低位同时编码;
请求位b24:0/1;
协议类型b25:1;
优先级b28~b26:8级优先,按位编码。
通信数据内容这里不再赘述,只对数据格式进行设计和说明。按照位数和精度要求,开关量按位传送,一个字节8个数据;浮点数据统一采用一个字节一个数据,最高位0代表正数,1表示负数,整数部分占4 bit,小数部分占3 bit[6]。
4.2 节点设计[5]
节点硬件电路采用模块化设计,系统主要由5部分构成:电源电路、处理器最小系统电路、信号调理电路、驱动电路、CAN收发接口电路。节点软件为嵌入式模块化结构,统一配置,见软件部分。
4.3 软件设计
1)软件系统架构
控制系统软件主要包括控制软件、显示软件、通信软件、执行软件等。
2)节点软件
节点软件设计采用模块化设计,分为初始化模块、任务功能模块、消息调度模块、通信模块,如图9所示。
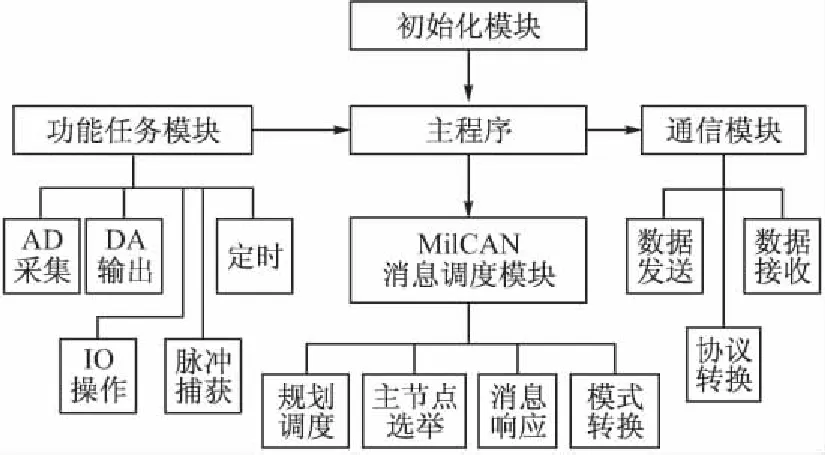
图9 软件主要功能模块
5 性能分析与验证
总线报文传输时间[2]:
TCAN_data=64+8m+(54+8m)/8
式中:TCAN_data表示报文传输时间;m为报文个数。扩展帧的起始、仲裁、校验、应答和结束共有64 bit,数据长度为8mbit,总线填充估计为(54+8m)/8 bit。
系统应用中均为命令式指令,最多时为2个字节,所以每次总线开销最大为88.75 bit。CAN的波特率设计为250 Kbit/s,则一次通信仅为0.4 ms。如果9个节点实施时间片控制,最多3.6 ms传输完成。按照控制需要,采样周期为20 ms,则每个节点相位应设置为2 ms。显然,在整个周期中,各个节点在0.002 2 s内,任何终端的数据都能够发送和接收完成。
设计基于STM32芯片的CAN节点,如图10所示,具有两路CAN接口,并具有AD、DA、IO等数据采集功能。系统采用总线型拓扑结构,连接9个节点,并进行了测试。测试采样主控节点同步下的从节点循环发送方式,测试结果如表2所示。
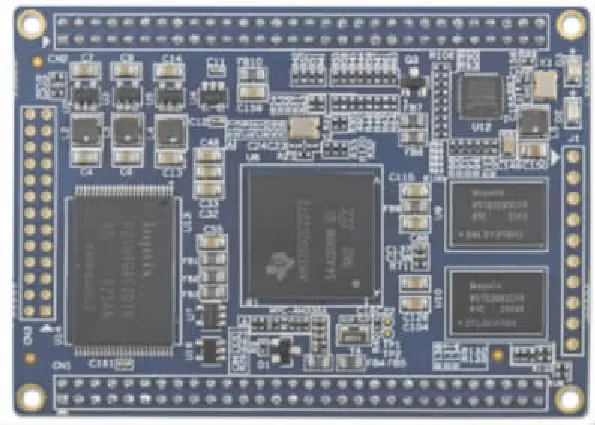
图10 节点电路
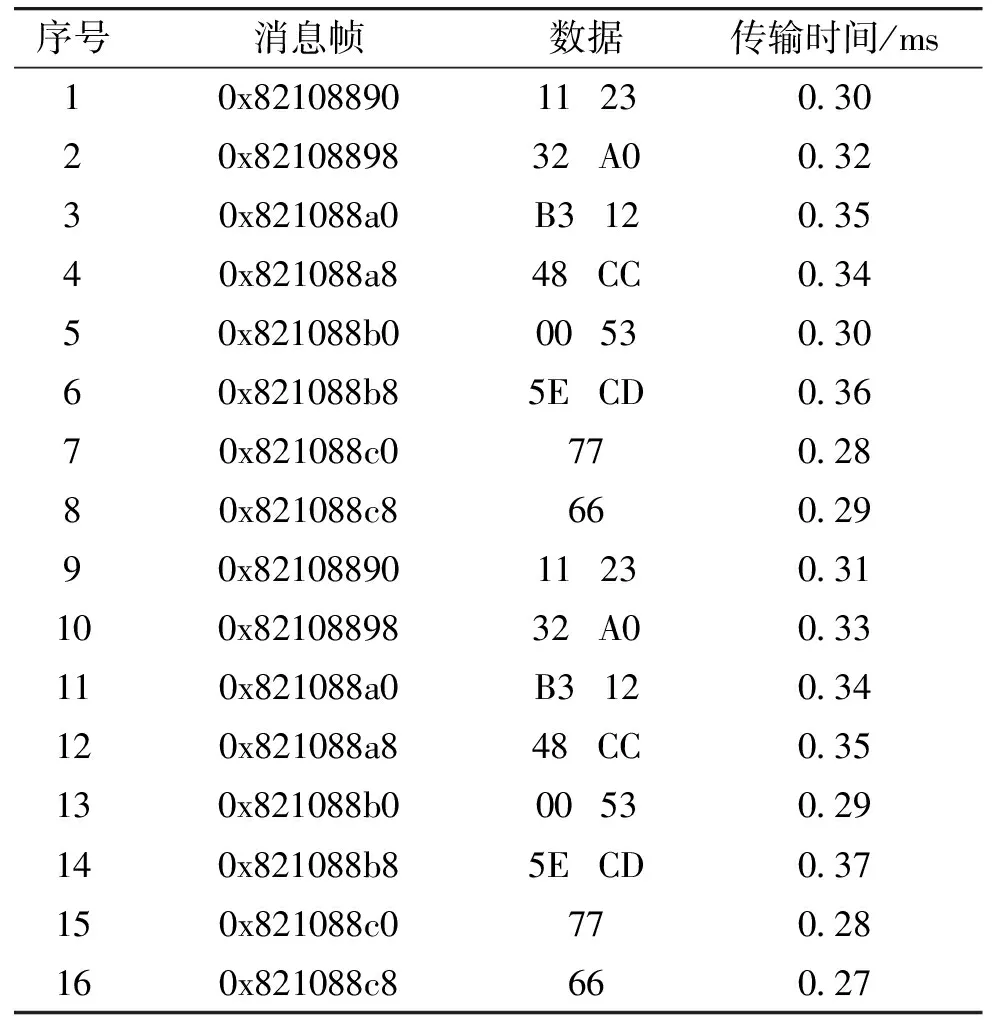
表2 总线报文记录表
试验结果表明,该分布式控制系统采样的总线及其控制方式能够满足系统要求。
6 结论
文中在CAN2.0B基础上,应用MilCAN总线协议,设计了分布式火箭炮控制系统。总结了系统的功能和要求,以此设计了消息类型和流程机制、调度管理方法,并规划了总体架构和应用协议,最后设计了节点电路和软件。通过测试和分析,表明设计的基于MilCAN总线的分布式火箭炮控制系统能够满足系统要求。
火箭炮系统采用总线结构将大大降低系统电缆数量,简化系统配置,优化数据链,便于维修检测。采用总线机制,实现控制系统实时信息传输控制和信息共享,完成调炮控制、发射控制、安全联锁等实时控制任务。该种方式优点是各功能单元集成化程度高,数据传输实现了全数字化,优化了信息流,并且便于扩展和独立升级。
[1] 宋小庆,熊全谦,王治国,等.装甲车辆自动配电系统MilCAN总线通信设计 [J].装甲兵工程学院学报,2010,24(5):57-62.
[2] 宋小庆,陈永星,朱昀炤,等.基于有色Petri网的MiLCAN网络仿真与性能分析 [J].系统仿真学报,2013,25(增刊):95-98.
[3] 王泓.CAN总线消息机制 [J].中国测试技术,2006,32(1):130-131.
[4] 杨晓华,侯巍,王树新,等.基于CAN总线的分布式控制网络设计 [J].低压电路,2006(1):40-42.
[5] 穆阳,薄拾,赵凯,等.MilCAN总线同步及调度配置方法 [J].计算机测量与控制,2014,23(4):1391-1393.
[6] 李光耀,郭迎清,王海泉.基于CAN总线的航空发动机分布式控制系统通信研究 [J].测控技术,2009,28(1):62-66.
ResearchonDistributedControlSystemofRocketLauncher
ZHANG Jianxin
(Hubei Jiangshan Heavy Industries Co.Ltd,Hubei Xiangyang 441057,China)
With increasing rocket launcher automation,the control system is more and more complicated.In order to reduce complexity of the monomer,improve flexibility of the system configuration,module level was improved to effectively enhance product reliability,maintainability and testability.Distributed rocket gun control system was designed.In this paper,top-down principle and system engineering method were used to study target function,architecture and message mechanism of the distributed system.According to the characteristics of rocket launcher developed,communication protocol was given,the design idea of distributed node was put forward.Through the development of distributed nodes and system test,it shows that the design can meet the requirements,and the operation mechanism is reliable.
rocket launcher; CAN bus; MilCAN; control system; distributed control
10.15892/j.cnki.djzdxb.2017.02.008
2016-06-30
张建新(1980-),男,陕西清涧人,高级工程师,硕士,研究方向:火箭炮总体,信息系统与自动控制。
TJ713
A
