EEMD和TFPF联合降噪法在齿轮故障诊断中的应用
2017-11-07宁少慧韩振南武学峰
宁少慧, 韩振南, 武学峰, 赵 远
(1.太原理工大学机械工程学院 太原,030024) (2.太原科技大学机械工程学院 太原,030024)
10.16450/j.cnki.issn.1004-6801.2017.05.024
EEMD和TFPF联合降噪法在齿轮故障诊断中的应用
宁少慧1,2, 韩振南1, 武学峰3, 赵 远1
(1.太原理工大学机械工程学院 太原,030024) (2.太原科技大学机械工程学院 太原,030024)
为了消除噪声对齿轮传动系统故障特征提取的影响,提出了一种基于集成经验模态分解(ensemble empirical mode decomposition,简称EEMD)和时频峰值滤波(time-frequency peak filtering,简称TFPF)相结合的降噪方法。针对TFPF算法在窗长的选择方面受到限制的问题,采用了EEMD方法对其进行改进,使得信号在噪声压制和有效信号保真两方面得到权衡;含噪声的信号经过EEMD分解后,得到一系列频率成分从高到低的本征模态函数(intrinsic mode functions,简称IMFs),计算出各IMFs间的相关系数,判断需要滤波的IMFs。对不同的IMFs选择不同的窗长进行TFPF滤波,把过滤后的IMFs和剩余的IMFs重构得到最终的降噪信号。用模拟仿真信号和齿轮齿根故障信号对该方法进行验证,可见EEMD+TFPF能有效地去除噪声,成功提取齿根裂纹故障特征。
时频峰值滤波; 集成经验模态分解; 齿根裂纹; 降噪
引 言
在齿轮传动系统的故障诊断中,最常见的是通过分析齿轮箱体振动信号提取系统故障特征。当齿轮箱中的齿轮、轴或轴承等机械设备产生故障时,箱体振动信号中除微弱的故障信息外,还会夹杂着各种频率的背景噪声,而且信号频带与噪声频带常会相互交错,使得传统的信号处理方法很难从包含强背景噪声的箱体振动信号中提取到微弱的故障信息[1]。集成经验模态分解(ensemble empirical mode decomposition,简称EEMD)不仅保持了经验模态分解(empirical mode decomposition,简称EMD)的自适应分解特性,还在本质上解决了EMD的模态混叠问题,被广泛用于时变的非线性、非平稳的齿轮传动系统的故障诊断中[2]。但由于EEMD分解后会得到多个本征模态函数(intrinsic mode functions,简称IMFs),每个IMFs中都有可能包含着故障频率成分,如何从EEMD分解的多个IMFs中提取故障频率成为EEMD在故障诊断领域应用的关键。
文献[3]把EEMD和相关系数结合,把相关系数大于0.5的IMFs保留,其他的IMFs去掉,在去噪声的同时可能会把有用的信号也去掉了。文献[4]把EEMD和排列熵结合,成功识别了高速列车转向架的故障状态。文献[5]提出了基于EEMD、形态谱特征提取和模糊C均值聚类集成法对齿轮传动系统的轴承做出了故障诊断。文献[6]提出了EEMD时频谱二值化方法,通过多尺度二进谱分析得到信号的权重谱,将其向时域累计得到权重向量,实现了微弱冲击特征的增强,成功提取齿轮传动系统中轴承故障特征。文献[7-8]分别把EEMD与快速谱峭度图和最小熵反褶积结合起来降噪,诊断齿轮系统的轴承故障。
时频峰值滤波(time-frequency peak filtering,简称TFPF)是由Mesbah等[9]提出的一种信号消噪算法,特点是能够在强噪声环境中提取出有效信号,被广泛应用在地震探测信号处理中[10-12]。时频峰值滤波法基于时频分析理论来消减随机噪声,通过频率调制将含噪信号调制为解析信号,利用解析信号维纳维尔分布沿瞬时频率最为集中的特性,将其峰值作为信号的瞬时频率来提取有效信号。文献[13]把该方法与时频分布结合应用到传动系统的轴承故障诊断中。在TFPF算法中,降噪的同时还能保持有用的振动信号的关键问题是窗长的选择。对于频率成分复杂的箱体振动信号,选择大的窗长在有效地去除噪声同时会造成有效信号的幅值损失;选择小窗长虽能很好地保真有效信号,但在降噪方面的力度却不够。而信号保真和噪声压制对能否成功提取出故障信号至关重要。针对此问题,笔者提出TFPF与EEMD联合降噪,振动信号在经过EEMD分解后得到从高频到低频的一系列IMFs,对不同频段的IMFs采用不同的窗长,解决了TFPF在窗长的选择方面的问题,有效地提取强噪声背景下的齿根裂纹的故障特征。
1 时频峰值滤波(TFPF)算法
1 TFPF消除噪声的基本原理
TFPF算法是基于伪Wigner-Ville分布的瞬时频率估计,首先将含噪声信号编码成解析信号,再计算解析信号的伪Wigner-Ville分布,并将其峰值作为信号的瞬时频率,从而消除随机噪声。
齿轮箱体振动信号x(t)中总会存在噪声,把它表示为
x(t)=s(t)+n(t)
(1)
其中:s(t)为振动信号中的有效信号;n(t)为背景噪声。
利用时频峰值滤波去除齿轮箱体振动信号的噪声的步骤如下。
1) 对包含噪声的信号x(t)进行频率调制,将其变为解析信号z(t)
(2)
其中:μ为频率调制指数。
2) 计算解析信号z(t)的伪Wigner-Ville分布频谱
(3)
其中:z*为z(t)的共轭。
3) 根据最大似然估计原理,求解析信号z(t)的PWVD分布频谱的峰值,作为解析信号的瞬时频率估计,即可得到原始有效信号的幅值估计
(4)
1.2 窗长的选择
通过仿真信号来说明TFPF算法中窗长选择的重要性。设定一个多调制源的仿真信号,采样频率为1 024 Hz,采样点数是1 024,调制频率分别为fn1=18 Hz,fn2=40 Hz;载波频率为fz=200 Hz。在仿真信号中加入白噪声n(t),仿真信号表达式为
x(t)= [1+cos(2πfn1t)+cos(2πfn2t)]·
cos(2πfzt)+n(t)
(5)
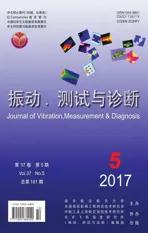
在信号中加入噪声后,比较在不同的窗长下TFPF的过滤结果,如图1所示。从图1(a)看出,纯净信号已被所加的噪声严重污染,合理地消除噪声,尽可能恢复原始信号对故障诊断非常重要。图1(b)和(c)是选择不同窗长降噪的效果,含噪信号在经过TFPF滤波后,噪声都有所减小,说明TFPF算法在噪声压制方面是非常有效的。图1(b)为长窗长的降噪结果,可以看出,信号的去噪效果虽好,但在幅度方面会有所损失,尤其在波峰与波谷的位置。图1(c)为短窗长的滤波效果,可以看到信号的波形和幅度损失小,但在噪声压制方面有所欠缺,滤波后依然残留很多噪声成分,信噪比将有所下降。
因此,TFPF算法中窗长的大小直接影响到信号保真和噪声压制的效果。振动信号经过EEMD分解后,对不同频率的信号分量选用不同的窗长进行滤波,既能有效地去除随机噪声,也能保真有效信号。
图1 TFPF法不同窗长的降噪结果Fig.1 Different window denoising signal using TFPF
2 集成经验模态分解(EEMD)原理
集成经验模态分解的实质是给原始信号加入极小幅度的白噪声,利用了白噪声频谱均衡分布的特点和零均值特性,经过多次平均后将噪声相互抵消,消除噪声对原信号的影响,很好地解决了模态混叠问题。EEMD具体分解步骤如下。
1) 向原始信号x(t)中多次加入零均值、幅值标准差为常数的白噪声nj(t)(j=1,2,…,M),j表示加入白噪声的次数;
xj(t)=x(t)+nj(t)
(6)
其中:xj(t)表示第j次加入白噪声后的信号。
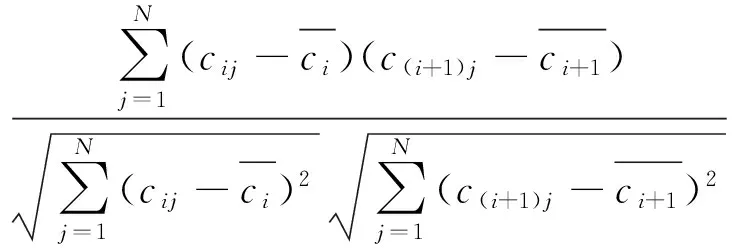
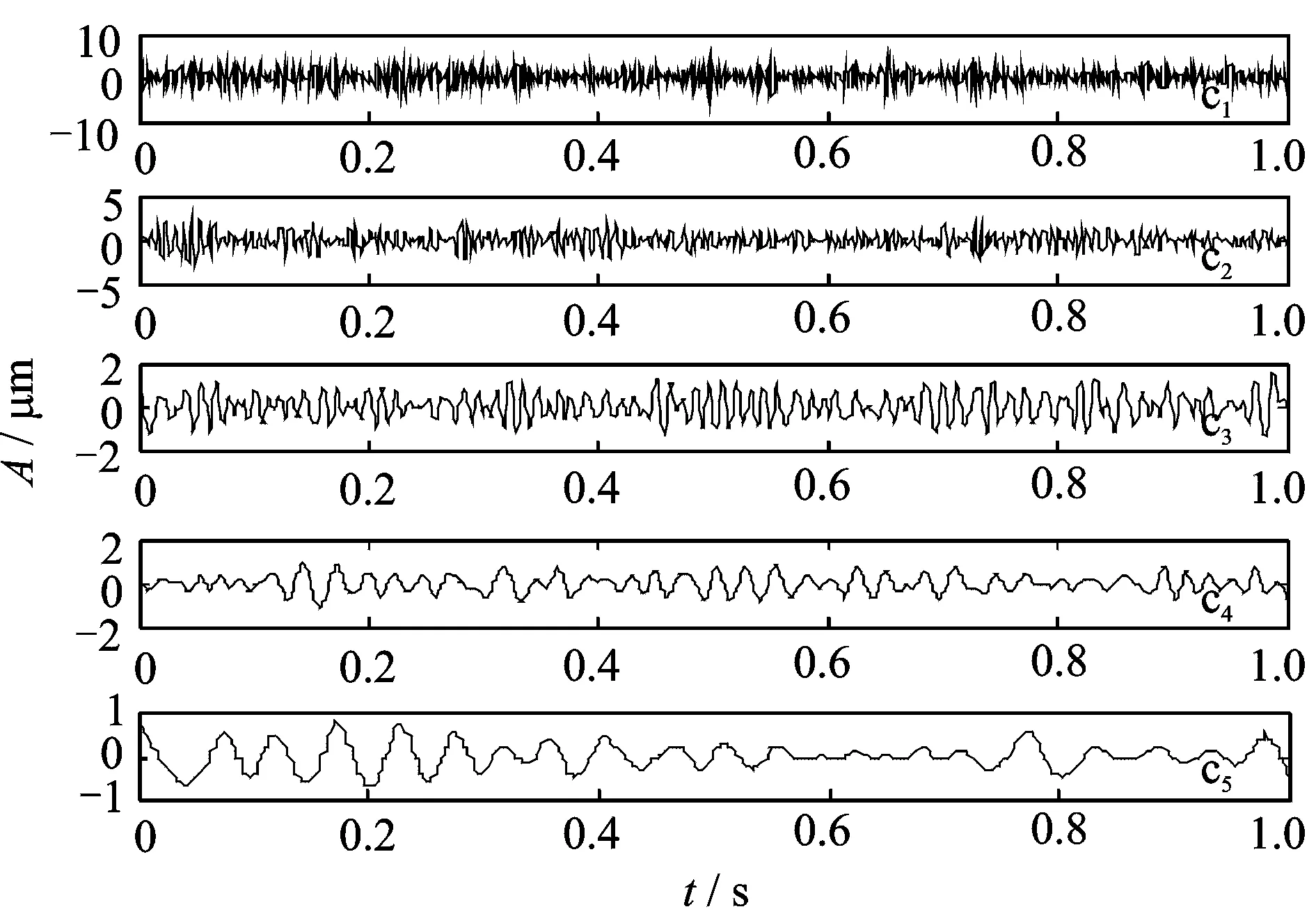
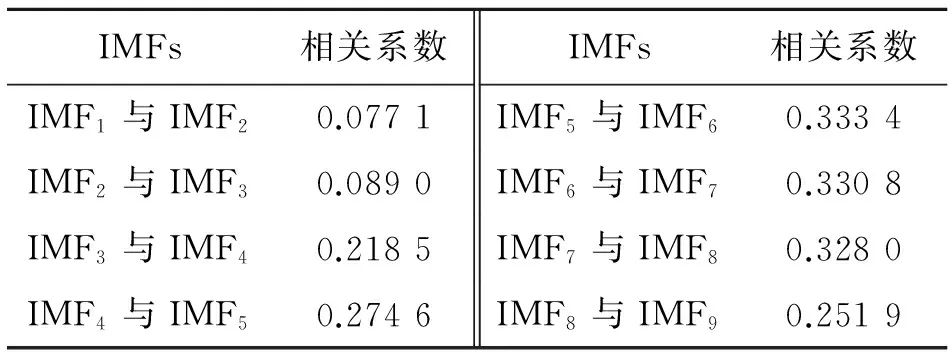
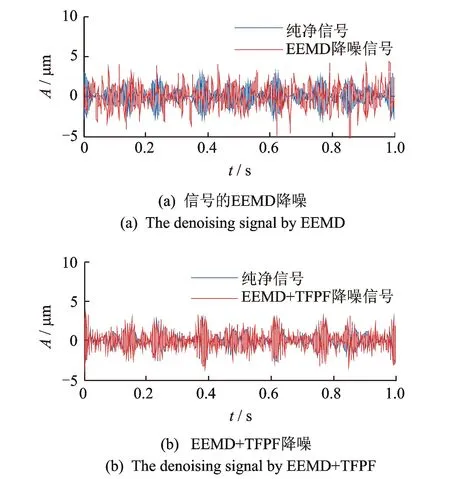
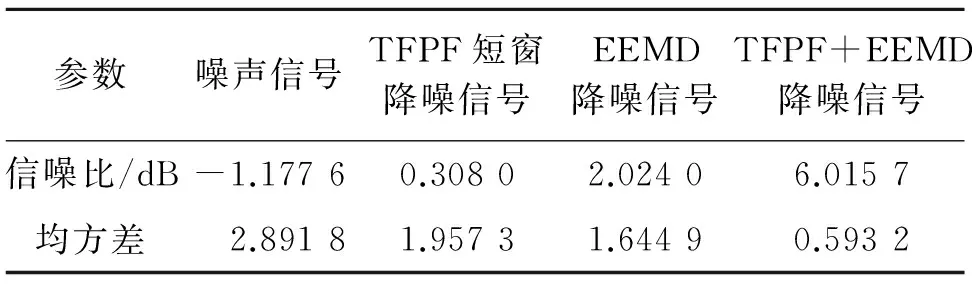
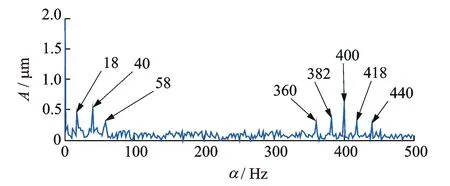
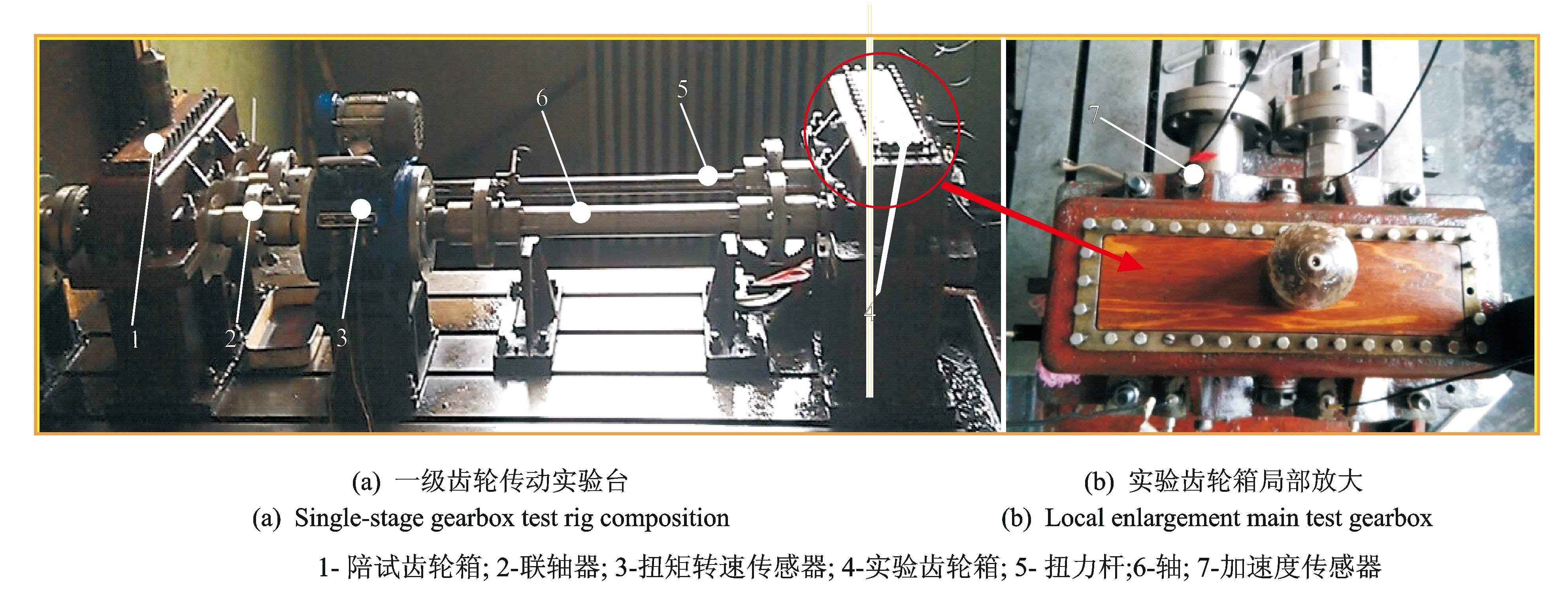
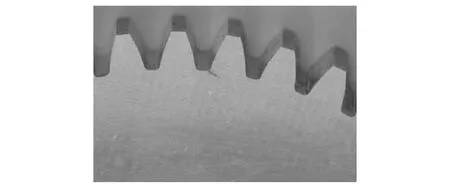
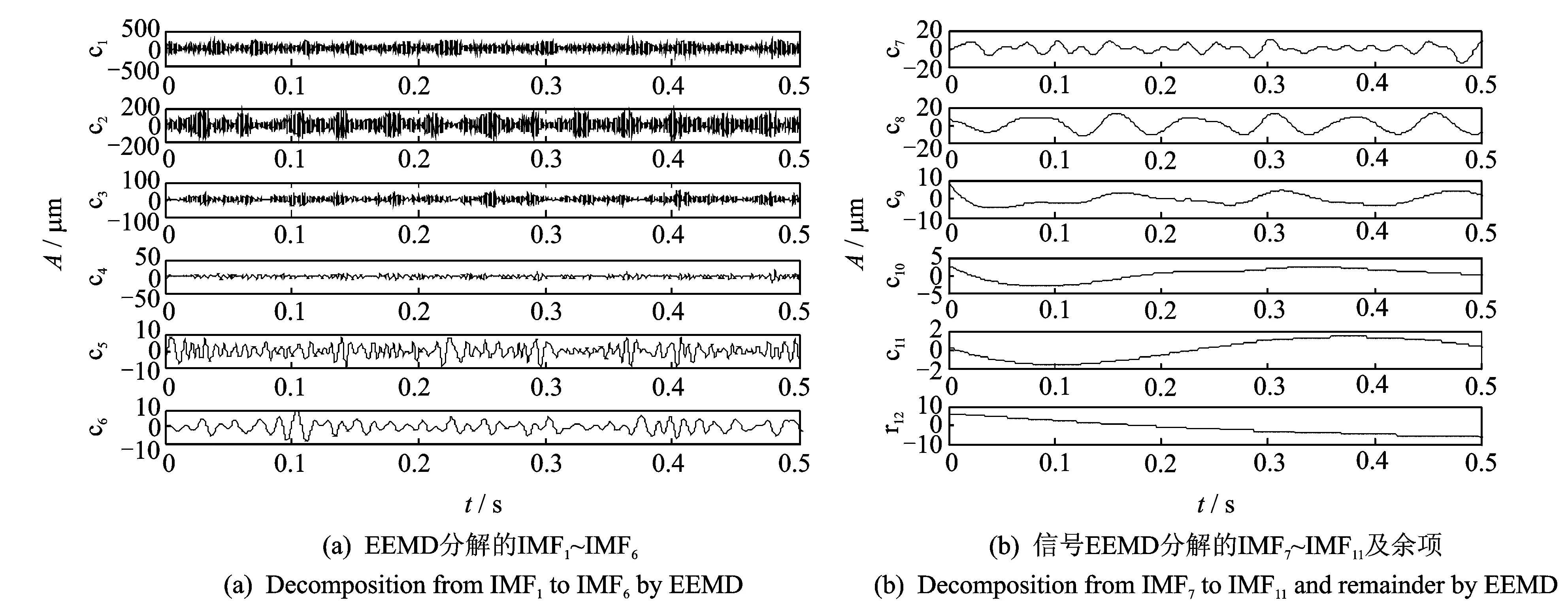
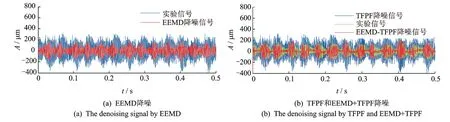
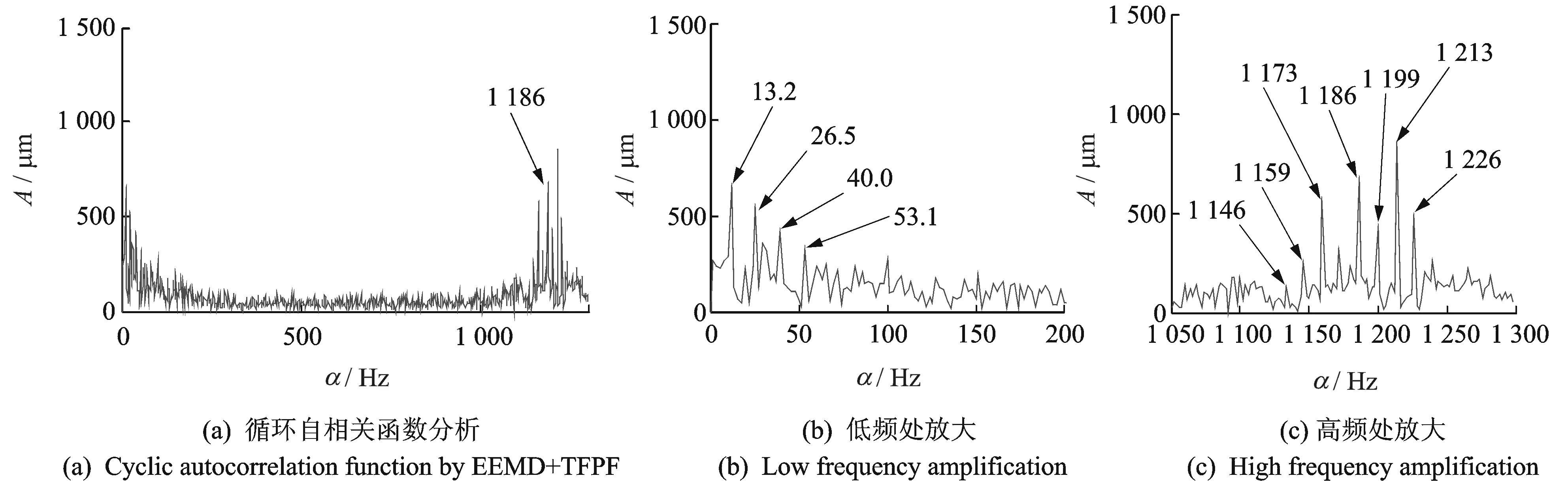
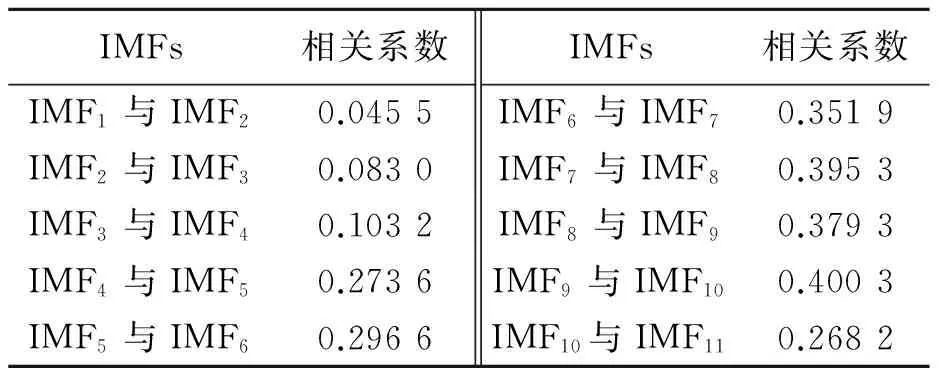
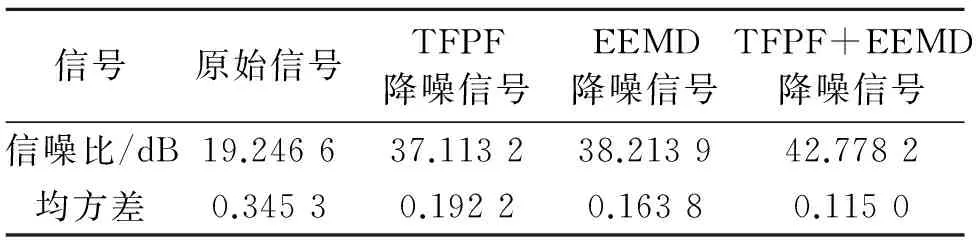
2) 将添加了白噪声的信号xj(t)通过EEMD算法分解为一系列本征模态函数ci,j(i=1,2,…,I),其中ci,j表示第j次加入白噪声幅值后,分解得到的第i个IMF;如果j 3) 将每次得到的对应IMFs的集成平均值作为最后的IMF (7) 其中:ci表示EEMD得到的第i个IMF;ci ,j表示第j次加入白噪声幅值后,分解得到的第i个IMF;M表示总体平均的次数。 为了解决TFPF在窗长的选择方面的局限性,把EEMD和TFPF相结合更适合齿轮传动系统的噪声消除,具体步骤如下。 1) 对含噪信号进行EEMD分解,得到频率成分由高到低的不同的IMFs。但每个模态分量不是纯噪声模态或者是纯信号模态,而是信号成分和噪声成分相互交叉的模态,所以不能直接丢弃将噪声主导的模态,或者直接将信号主导模态保留。要判断哪些模态需要进行滤波处理。 2) 通过公式(8)计算各模态间的互相关系数并判断需要滤波的模态。一般情况下,如果计算出的两个相邻模态间的互相关系数从一个较大的值往后都相对比较稳定,那么此值就可作为模态分界的阈值,这两个模态中后一个模态及之后的模态就无需进行滤波处理,仅对其之前的模态分量选取合适窗长的TFPF进行降噪处理[14]。计算各IMFs间的互相关系数公式为 (8) 3) 选择不同窗长的TFPF对需要降噪的IMFs分量进行处理,原则为:高频分量主要包含的信号为噪声信号,选用长窗长去噪;低频分量主要成分是有用信号,因此选取短窗长。 4) 将去噪后的模态和剩余模态重构得到最终的滤波信号。为了提取故障频率特征,对重构信号进行了循环解调分析,其过程如图2所示。 图2 含噪信号的降噪过程Fig.2 Denoising process of signal 用仿真信号验证EEMD+TFPF的有效性。对式(5)的仿真信号采用EEMD+TFPF法进行降噪,信号的EEMD分解结果如图3所示。 图3 信号的EEMD分解Fig.3 Signal decomposition IMFs by EEMD 各相邻IMF间的互相关系数计算结果如表1。 表1 仿真信号IMFs间的互相关系数 从表1可知,相邻IMFs的互相关系数从IMF4后的值较稳定,故只需对IMF1,IMF2和IMF3选择不同的窗长进行TFPF处理。为了说明EEMD+TFPF的降噪优势,对含噪信号也进行EEMD和TFPF降噪。图4(a)是EEMD降噪结果,可以看出在去噪的同时,也去掉了部分有效信号。图4(b)是EEMD+TFPF的联合降噪,既保真了信号幅值又使噪声得到了有效的压制。TFPF降噪在前面已经讨论过。 信噪比和均方差是衡量降噪效果的重要指标,通过计算噪声信号,TFPF,EEMD和EEMD+TF-PF的SNR和MSE,进一步说明TFPF+EEMD降噪的优越性。结果如表2所示:TFPF+EEMD降噪的信噪比最大,均方差最小,说明了TFPF+EEMD降噪的优越性。 图4 两种方法的降噪结果Fig.4 The denoising signal by EEMD and EEMD+TFPF 参数噪声信号TFPF短窗降噪信号EEMD降噪信号TFPF+EEMD降噪信号信噪比/dB-1.17760.30802.02406.0157均方差 2.89181.95731.64490.5932 当齿轮传动系统出现故障时,其箱体振动信号为调制信号[1],要从振动信号中提取故障频率特征,需要对其进行解调分析。对EEMD+TFPF的降噪信号进行解调分析,结果如图5所示,低频处出现18,40及58 Hz是原信号的调制频率。在高频处二倍载波频率400 Hz明显突出,以调制频率18和40 Hz为间隔的边频带特征也被很清晰的解调出来。因此,EEMD+TFPF联合降噪,既保持了有用信号,又最大程度地去除了噪声。 图5 仿真信号经过EEMD+TFPF降噪后的循环自相关分析Fig.5 Cyclic autocorrelation function of simulation signal by EEMD+TFPF denoising 单级齿轮传动实验系统如图6所示,主要包括电机、齿轮陪试箱、实验齿轮箱、加速度传感器及扭力杆等。在齿轮箱的轴承座上安装了4个压电加速度传感器,从动轮为故障齿轮。实验时,由电机驱动整个传动系统的运转,通过扭力杆加载,从扭矩测量仪观察转速和转矩的大小。主动轮齿数为30,从动轮齿数为45。在从动轮的齿根处,人工加工长度为2 mm的裂纹(图7),采用了动态数据采集分析系统进行信号采集,对采集到的信号采用TFPF,EEMD和EEMD+TFPF降噪法降噪。 图6 齿轮传动实验台及局部放大Fig.6 Single-stage spur gearbox test rig 图7 齿根裂纹Fig.7 Gear tooth root cracks 将集成经验模态分解和时频峰值滤波结合起来进行去噪,当齿轮传动系统的负载为323 N·m,转速为1 186 r/min,采样频率为8 kHz时,对系统采集到的箱体振动信号作EEMD分解,如图8所示。高频分量成分以噪声为主,直接去掉虽然可以达到降噪目的,但有可能丢失存在高频分量中的有效信号。也不能对所有模态进行TFPF滤波,因为在低频模态含有纯信号成分。所以要通过计算各IMFs间的相关系数来判断哪些IMFs需要滤波(见表3)。 图8 实测故障信号的EEMD分解Fig.8 Experimental signal decomposition IMFs by EEMD 图9 EEMD和EEMD+TFPF降噪3种降噪结果Fig.9 The denoising signal by EEMD and TFPF and EEMD+TFPF 图10 实验信号经过EEMD+TFPF降噪后的循环自相关函数分析Fig.10 Cyclic autocorrelation function of experiment signal by EEMD+TFPF denoising IMFs相关系数IMFs相关系数IMF1与IMF20.0455IMF6与IMF70.3519IMF2与IMF30.0830IMF7与IMF80.3953IMF3与IMF40.1032IMF8与IMF90.3793IMF4与IMF50.2736IMF9与IMF100.4003IMF5与IMF60.2966IMF10与IMF110.2682 从表3中可知,需要对前四个模态进行TFPF降噪处理,然后将去噪后的模态与不需去噪的模态重构得到最终的降噪信号,这使得TFPF降噪仅作用于以噪声为主的高频IMFs,改善了直接使用TFPF降噪的缺陷,降噪结果如图9。为了说明EEMD+TFPF降噪的优越性,对3种降噪结果做了对比。 计算原始信号、EEMD和EEMD+TFPF的SNR和MSE,如表4所示。从对比结果可以看出,经过TFPF+EEMD降噪的信噪比最大,均方差最小,说明了TFPF+EEMD降噪的优越性。 表4实验信号3种降噪结果的信噪比和均方差 Tab.4ThreedenosingSNRandMSEofexperimentalsignals 信号原始信号TFPF降噪信号EEMD降噪信号TFPF+EEMD降噪信号信噪比/dB19.246637.113238.213942.7782均方差0.34530.19220.16380.1150 裂纹是齿轮箱多种故障中比较难识别的故障,当轮齿齿根出现裂纹时,振动信号的频率成分和幅值都会发生变化,因此调幅效应和调频效应同时存在,频谱上的边频成分由于具有不同的相位,使得信号的调制边频带不再对称。对采用EEMD+TFPF降噪后的信号进行循环自相关解调分析,结果如图10所示,纵坐标表示幅值,用A表示,横坐标为循环频率,用α表示。根据解调原理,调幅调频效应同时存在会导致信号的循环域低频段出现调制源的1倍频和2倍频及以上成分,高频段出现以啮合频率为中心频率,以故障齿轮所在轴的转频为调频的边频带。图10(b)中,出现了冲击频率13.2 Hz的1倍频、2倍频及3倍频,说明此时发生了刚度变化而引得的调幅调频同时存在。这种现象从图10(c)也可以看出,由于调幅调频同时存在,信号的边频带不再对称,啮合频率1 186 Hz的振幅也不再是最大。 通过将集成经验模态分解(EEMD)与时频峰值滤波法(TFPF)有效地结合,突出了两种方法各自的优点,使TFPF降噪仅作用于含噪声成分较多的IMFs,而不是在整个信号,解决了TFPF的窗长选择在信号幅度和噪声压制上的矛盾,突破了TFPF方法窗长选择的局限性,提高了分析的准确性。对降噪后的信号进行循环自相关解调分析,有效地提取了齿轮齿根裂纹的故障特征。EEMD+TFPF除了适用齿轮传动系统故障诊断,还可以用于其他系统的故障诊断。 [1] 丁康,李巍华.齿轮及齿轮箱故障诊断实用技术[M].北京:机械工业出版社,2005:63-65. [2] Wu Zhaohua, Huang Norden E. Ensemble empirical mode decomposition: A noise assisted data analysis method [J]. Advances in Adaptive Data Analysis, 2009, 1(1): 1-41. [3] 陈仁祥,汤宝平,吕中亮.基于相关系数的EEMD转子振动信号降噪方法[J].振动、测试与诊断,2012,32(4):542-546. Chen Renxiang, Tang Baoping, Lu Zhongliang. Ensemble empirical mode decomposition de-noising method based on correlation coefficients for vibration signal of rotor system[J]. Journal of Vibration, Measurement & Diagnosis, 2012,32(4):542-546. (in Chinese) [4] 秦娜,蒋鹏,孙永奎,等. 基于EEMD排列熵的高速列车转向架故障特征分析[J].振动、测试与诊断,2015,35(5):885-891. Qin Na,Jiang Peng,Sun Yongkui, et al. Fault diagnosis of high speed train bogie based on EEMD and permutation entropy [J]. Journal of Vibration, Measurement & Diagnosis, 2015,35(5):885-891. (in Chinese) [5] 郑直,姜万录,胡浩松.基于EEMD形态谱和KFCM聚类集成的滚动轴承故障诊断方法研究[J].振动工程学报,2015,28(2):324-330. Zheng Zhi,Jiang Wanlu,Hu Haosong. Research on rolling bearings fault diagnosis method based on EEMD morphological spectrum and kernel fuzzy C-means clustering [J]. Journal of Vibration Engineering, 2015,28(2):324-330. (in Chinese) [6] 王 鹏,王太勇,董靖川.基于EEMD时频谱二值化的振动信号微弱特征提取方法[J].天津大学学报:自然科学与工程技术版,2016,49(7):667-673. Wang Peng,Wang Taiyong,Dong Jingchuan. Weak feature extraction of vibration signal based on binaryzation of EEMD time-frequency [J].Journal of Tianjin University:Science and Technology,2016,49(7):667-673. (in Chinese) [7] 蒋超,刘树林,姜锐红,等.基于快速谱峭度图的EEMD内禀模态分量选取方法[J].振动、测试与诊断,2015,35(6):1173-1178. Jiang Chao,Liu Shulin,Jiang Ruihong, et.al. Feature extraction method of intrinsic mode function in EEMD based on fast kurtogram in machinery fault diagnosis [J]. Journal of Vibration, Measurement & Diagnosis, 2015,35(6):1173-1178. (in Chinese) [8] 王志坚,韩振南,刘邱祖,等.基于MED-EEMD的滚动轴承微弱故障特征提取[J].农业工程学报.2014,30(23):70-78. Wang Zhijian, Han Zhennan, Liu Qiuzu, et al. Weak fault diagnosis for rolling element bearing based on MED-EEMD[J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(23): 70-78. (in Chinese) [9] Boashash B, Mesbah M. Signal enhancement by time frequency peak filtering[J] .IEEE Transactions on Signal Processing,2004, 52(4):929-937. [10] Liu Yanping, Li Yue. Spatiotemporal time-frequency peak filtering method for seismic random noise reduction[J]. IEEE Geoscience and Remote Sensing Letters,2013,10(4):756-760. [11] Zhang Jie, Li Yue,Wu Ning. Noise attenuation for seismic data by Hyperbolic-Trace time-frequency peak filtering[J]. IEEE Geoscience and Remote Sensing Letters, 2015,12(6):601-605. [12] Zhang Chao , Li Yue, Lin Hongbo. Signal preserving and seismic random noise attenuation by Hurst exponent based time-frequency peak filtering[J].Geophysical Journal International, 2015,203(2):901-909. [13] 杨平.基于时频消噪 TFPF和时频分布 MBD的轴承早期故障诊断[J]. 四川理工学院学报,2010,23(3):357-360. Yang Ping. Rolling bearing incipient fault diagnosis based on TFPF and modified b-distribution[J]. Journal of Sichuan University of Science & Engineering,2010,23(3):357-360. (in Chinese) [14] 刘彦萍.时空二维时频峰值滤波方法压制地震勘探随机噪声的研究[D].长春:吉林大学,2013. 国家自然科学基金资助项目(50775157);山西省基础研究资助项目(2012011012-1) 2016-06-23; 2016-09-21 TH17; TH13 宁少慧,女,1978年10月生,博士、讲师。主要研究方向为齿轮传动系统故障诊断。曾发表《A novel fault diagnosis approach of gearbox using an embedded sensor fixed gear body》(《Journal of Vibroengineering》2016,Vol.18,No.7)等论文。 E-mail:nshzzl@126.com 韩振南,男,1958年2月生,教授、博士生导师。主要研究方向为机械传动系统故障诊断。 E-mail:zhennan-han@hotmail.com
3 基于EEMD和TFPF的降噪方法
4 仿真分析
5 齿轮传动系统实测信号分析
5.1 齿轮传动实验系统
5.2 EEMD+TFPF降噪分析
6 结束语