基于RealWorks和SketchUp的建筑物点云数据三维建模
2017-11-06张德杨张真真
高 俊 张德杨 张真真
基于RealWorks和SketchUp的建筑物点云数据三维建模
高 俊1张德杨1张真真2
(1.河南省科学技术信息研究院,河南 郑州 450003;2.郑州轻工业学院计算机与通信工程学院,河南 郑州 450002)
随着激光扫描技术的不断提高及数据处理方法的不断完善,地基三维激光扫描技术在建筑物三维建模方面的应用越来越广泛。本文基于RealWorks和SketchUp,以实例详细介绍了地基激光扫描三维建模的技术流程,重点对点云数据的配准、去噪、特征线提取、三维几何建模和纹理贴图等步骤进行详细论述,实现了建筑物点云数据三维建模。
1 研究背景
传统建筑物空间信息获取主要依赖于地面全站仪采点、航空摄影测量和卫星影像等,但由于数据获取能力的限制,难以得到真实有效的建筑物三维模型[1]。激光扫描测距技术以其高精度、高密度、高效率、实时性强、信息量丰富和非接触主动测量等特点,通过非接触式主动测量可进行大面积、高密度空间三维数据的采集,使测绘从传统的单点数据采集转变为密集、连续的自动数据获取,增加了信息量,提高了工作效率。利用三维点云进行建筑物的三维建模也得到了广泛应用,如化蕾[2]等利用点云数据建立了客家土楼的三维模型,彭文博[3]等利用点云数据对古建筑进行三维建模,宫丽玮[4]等利用Cyclone和PolyWorks分别对规则和不规则建筑物进行三维建模。本文利用RealWorks和SketchUp以实例详细介绍建筑物点云数据三维建模的技术流程和关键技术。
2 建筑物点云数据三维建模技术流程
基于点云数据的建筑物三维建模的流程主要包括制作扫描方案、点云数据采集、点云数据处理、特征线提取、三维模型构建及纹理贴图等环节。具体流程如图1所示。
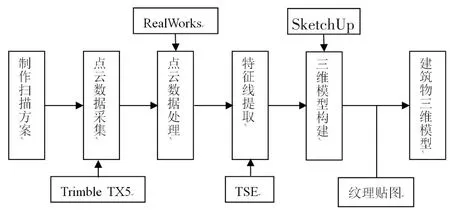
图1 建筑物点云数据三维建模技术流程图
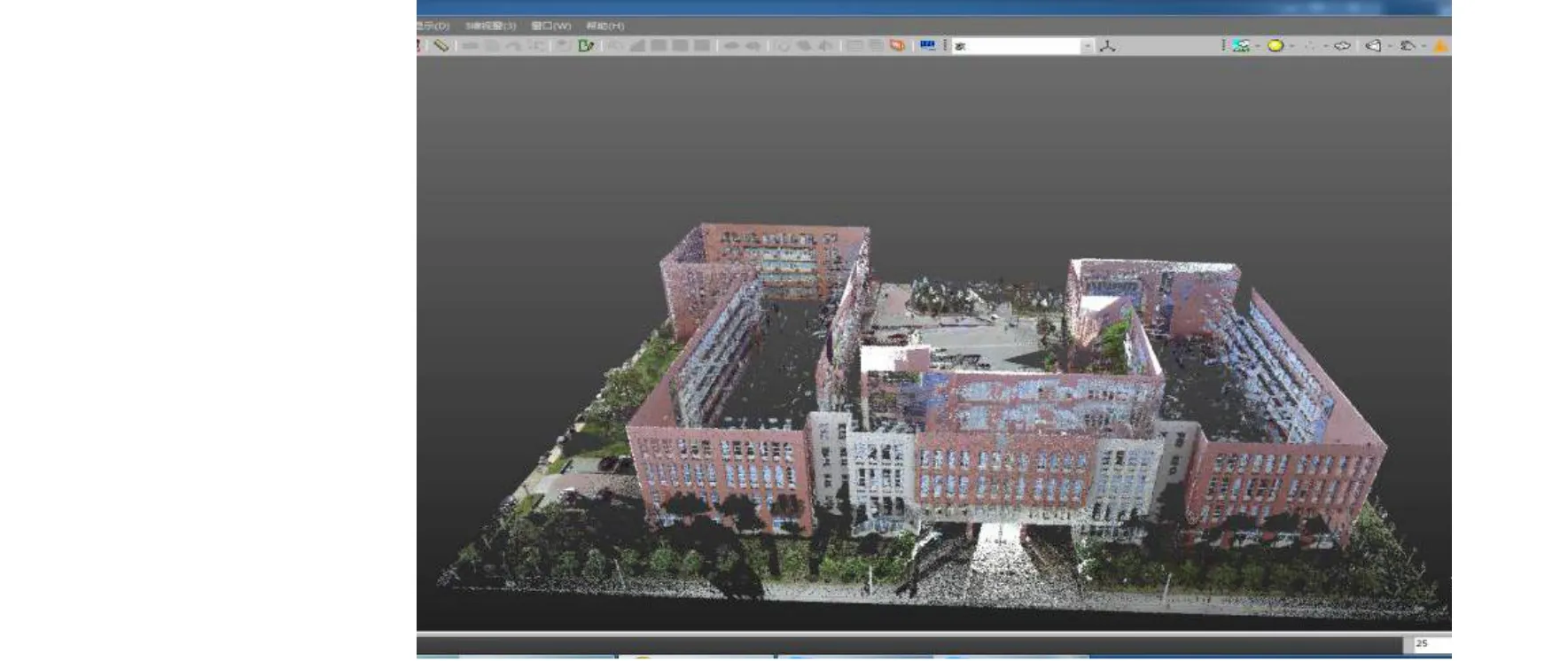
图2 多站点云配准结果图
3 建筑物点云数据三维建模实例
3.1 点云数据采集
采用Trimble TX5扫描仪,其扫描距离可达120m,扫描距离精度为2mm@25m。为获取较高精度的点云数据,各站的平均扫描距离为16m,设定分辨率为1/2,可以获得5mm间距的点云数据。由于在后续点云坐标转换和配准中,需要求解7个参数,因此,每2站至少需要3个公共点进行坐标转换,需要至少放置3个反射标志。为了保证拼接和建模的精度,测站间设定放置5个目标球,并保持10%以上的重叠度。在摆放目标球时,反射标志应避免摆放在一条直线上,同时构成不规则的三角形(避免出现等腰或等边三角形)。共架设10个测站完成郑州轻工业学院计算机楼的点云数据采集。
3.2 点云数据处理
利用Trimble Real Works软件对点云数据进行预处理,完成点云数据的配准、消噪、冲采样等过程。
3.2.1 点云数据的配准。由于采用多站测量的方式,而不同扫描站获得的点云分别采用其各自的局部坐标系,需要配准到统一坐标系完成多站点云的拼接。将多站fls格式的点云导入Real Works中,选择“有目标配准”,系统将根据目标球的自动识别完成点云配准,配准结果如图2所示。由配准报告可知,各个基站数据拼接后的误差可以保持在6mm以内。
3.2.2 点云消噪。激光信号在获取目标表面几何和光谱信息的过程中,由于受大气和目标表面因素的影响及障碍物遮挡等,会不可避免地产生噪声,对点云的分割、识别和建模都会产生不利影响。因此,需要在进一步处理前先进行点云滤波[4]。在RealWorks中,通过人工交互操作,转换不同视角,对粗差、噪点进行剔除。
3.2.3 点云数据重采样。在点云数据采集的过程中,测站间保持了10%以上的重叠度,将在数据拼接的过程中造成数据冗余。此外,由于扫描仪距离目标反射点之间存在距离差异,随着扫描距离的增加,点云的密度将逐渐减少。因此,需要对点云数据设置一阈值进行重采样。在RealWorks中,执行“取样”,根据建筑物本身和点云数据的完整情况选取取样模式,本文选取“空间采样”模式,分辨率为5mm,完成点云数据的重采样。
3.3 特征线提取
由于扫描的点云数据都是以点坐标的方式保存的,文件的数据量较大,且点云数据无法直接用来建立模型,需要把点云转变成可以持续设计的模型。利用作为SketchUp插件的Trimble Scan Explorer(TSE),可以自动提取关键点、线、面等要素信息。利用第一个Shell工具选项可以提取点云数据中所有的边界,但这种方式对数据量较大的点云需要耗费更多计算资源,可利用后两个Shell工具选项从矩形或多边形选择窗的扫描数据中提取边界,提取的边界将直接传递到SketchUp中。
3.4 基于SketchUp的三维建模
根据已经提取测站扫描数据中建筑物的特征线,在SketchUp中构出三维模型的基本框架模型(白模型)(见图3)。为得到更加真实的模型,需要在白模型的表面附上纹理贴图,打开SketchUp的材质工具,将纹理图片贴到建筑物各个面上,并调整贴图坐标,使图片与建筑物表面吻合,贴图效果如图4所示。
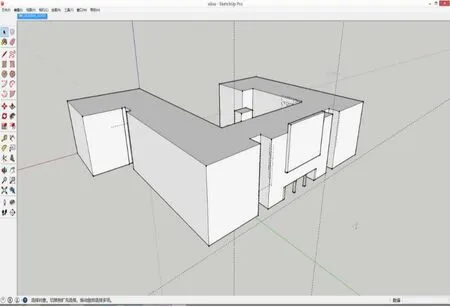
图3 基于SketchUp的建筑物三维白模型

图4 具有纹理贴图的建筑物三维模型
经贴图和渲染后的建筑物三维模型如图5所示,可以结合ArcScene、Skyline、Bently等平台进行展示。
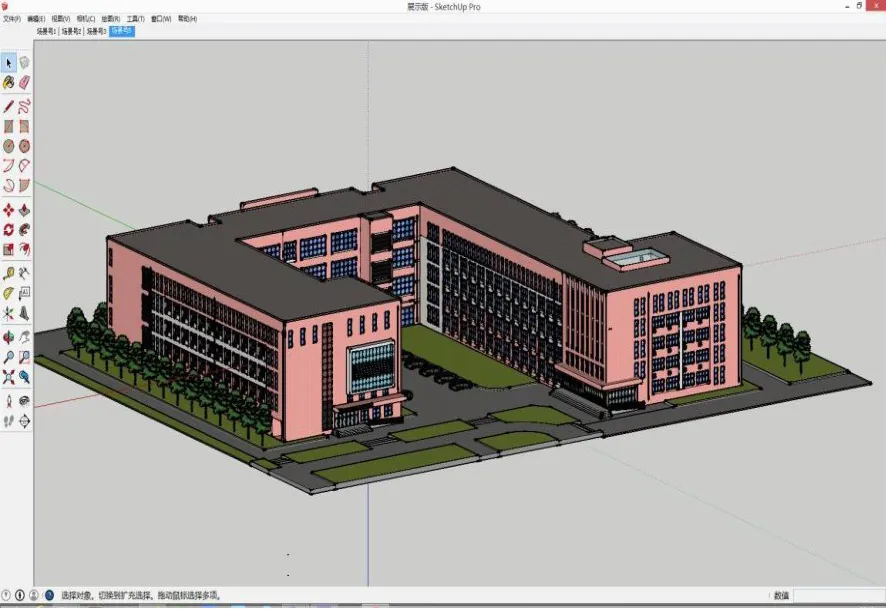
图5 建筑物三维模型整体图
4 结语
本文基于RealWorks和SketchUp对建筑物三维建模的方法进行了探讨,在论述外业点云数据采集的基础上,以实例详细介绍了地基激光扫描三维建模的技术流程,重点阐述了点云数据的配准、去噪、特征线提取、三维几何建模和纹理贴图等方法,实现了基于建筑物点云数据的三维模型的快速生成。
[1]颜彩飞,舒莉.大型建筑物数字化及三维建模关键技术研究[J].甘肃科技,2014(19):92-94.
[2]化蕾,黄洪宇,陈崇成,等.基于激光点云数据的客家土楼三维建模[J].遥感技术与应用,2015(1):115-120.
[3]彭文博,杨武年,王鹏.三维激光扫描技术在古建筑模型重建中的应用[J].地理空间信息,2016(3):94-96.
[4]宫丽玮,张毅,闫利.基于Cyclone和PolyWorks的三维建模实现[J].地理空间信息,2012(5):38-40.
Three Dimensional Modeling of Building Point Cloud Data Based on RealWorks and SketchUp
Gao Jun1Zhang Deyang1Zhang Zhenzhen2
(1.Henan Institute of Science and Technology,Zhengzhou Henan 450003;2.College of Computer and Communication Engineering,Zhengzhou University of Light Industry,Zhengzhou Henan450002)
With the improvement of ground-based laser scanning technology and the data processing methods,the application of 3D laser scanning technology in building 3D modeling is more widely.Based on RealWorks and Sketch-Up,this paper introduced the technical process of 3D modeling of ground-based laser scanning.The steps of point cloud registration,denoising,feature extraction,3D geometric modeling and texture mapping were discussed in detail.Using the measured data of building point cloud,the 3D modeling of building was established.
point cloud data;3D modeling;RealWorks;SketchUp
点云数据;三维建模;RealWorks;SketchUp
P225.2;TU198
A
1003-5168(2017)09-0021-03
2017-08-01
河南省科技攻关项目(162102310579,162102210146)。
高俊(1980-),男,硕士,工程师,研究方向:计算机网络;张德杨(1979-),男,硕士,工程师,研究方向:计算机网络;张真真(1994-),男,本科在读,研究方向:激光点云数据处理。
