渔船舵机标准适用性研究
2017-11-03曹建军陈寅杰
曹建军,陈寅杰
(中国水产科学研究院渔业机械仪器研究所, 上海 200092)
渔船舵机标准适用性研究
曹建军*,陈寅杰
(中国水产科学研究院渔业机械仪器研究所, 上海200092)
渔船舵机在船舶的回转性和航向稳定性上具有重要作用,是船舶安全航行的关键设备之一。适当的标准依据可为渔船的产品质量提供保障。本研究分析了渔船舵机结构和性能参数,对比了现有技术标准与方法标准,发现目前执行的标准不能完全适用于中国的渔船上所安装的舵机,且技术标准与方法标准内容不完全对应,这就可能会造成在渔船检验过程中漏检,甚至在航行中无舵、滞舵。因此,引导舵机生产制造商造出安全、实用、可靠的渔船舵机的产品标准亟待出台,为广大渔民生产作业安全提供保障。[中国渔业质量与标准,2017,7(5):60-64]
渔船;舵机;标准;适用性
渔船舵机在船舶的回转性和航向稳定性上具有重要作用,是船舶安全航行的关键设备之一。合适的标准依据可为渔船的产品质量提供保障。在《渔业船舶船用产品检验管理规定》[1]中,舵机被列为A1类产品,需要经渔船检验机构认可,并需查验渔船船用产品证书方可装船。因此渔船用舵机各类产品在定型之前要进行型式试验,在出厂之前要进行出厂试验,以保证其性能可靠。既然需要型式试验和出厂试验那就必须需要有技术要求和试验方法,目前国内舵机试验现行有5个标准有:GB/T19318—2003《小艇液压操舵系统》[2]、CB/T972—1994《海洋船舶液压舵机》[3]、CB3129—1982《液压舵机通用技术条件》[4]、CB/T3130—1998《液压舵机试验方法》[5]、SC/T8090—1994《渔船液压舵机安装技术要求》[6]。主要使用的标准是CB/T972—1994《海洋船舶液压舵机》、CB3129—1982《液压舵机通用技术条件》这两个技术要求和CB/T3130—1998《液压舵机试验方法》 这个方法标准。从标准年限上可看到这些标准使用时间最短的也已经14年,而最长的则已使用35年。且商船一般都比较大(船长>45m),使用液压舵机、液压应急系统很常见;而渔船则不然,根据2017年中国渔业统计年鉴,中国的机动渔船65.42万艘,大部分都是小型船(船长<45m),只有2000多艘远洋渔船。船长超过45m的渔船虽然大多都使用液压舵机,但应急操舵则是采用手摇泵应急操舵系统,即油泵由主机带。还有部分渔船使用的是人力机械操舵。尽管渔船舵机和其他船的舵机基本原理大致相同,但在一些操纵使用,性能要求上还是差异显著的,因此需要对标准的适用性进行研究,如有必要则需要制订适用于渔船的SC标准。
1 舵机的构造和基本参数
1.1 基本构造
液压舵机是由电动机、油泵、舵叶、舵杆、舵柄等5大部分组成,其工作原理是用油液作为传递能量的介质,利用油液的不可压缩性及流量、压力和流向的可控性来实现转舵[7]。舵机通过油泵把机械能转化为油液的压力能,然后通过转舵机构把压力能转化为机械能,实现舵的左、右转向。液压舵机按结构型式可分为往复式、转叶式、回转式;按控制型式分,可以分为泵控型和阀控型。其中往复式使用最为普遍,转叶式、回转式一般用在大型船或特种船,而泵控型又比阀控型经济,因此一般船舶包括渔船都使用泵控型往复式液压舵机。而往复式从转舵机构分又常被分为拔叉式和摆缸式。渔船一般都使用摆缸式,图1为典型的泵控型往复式摆缸型液压舵机原理图。
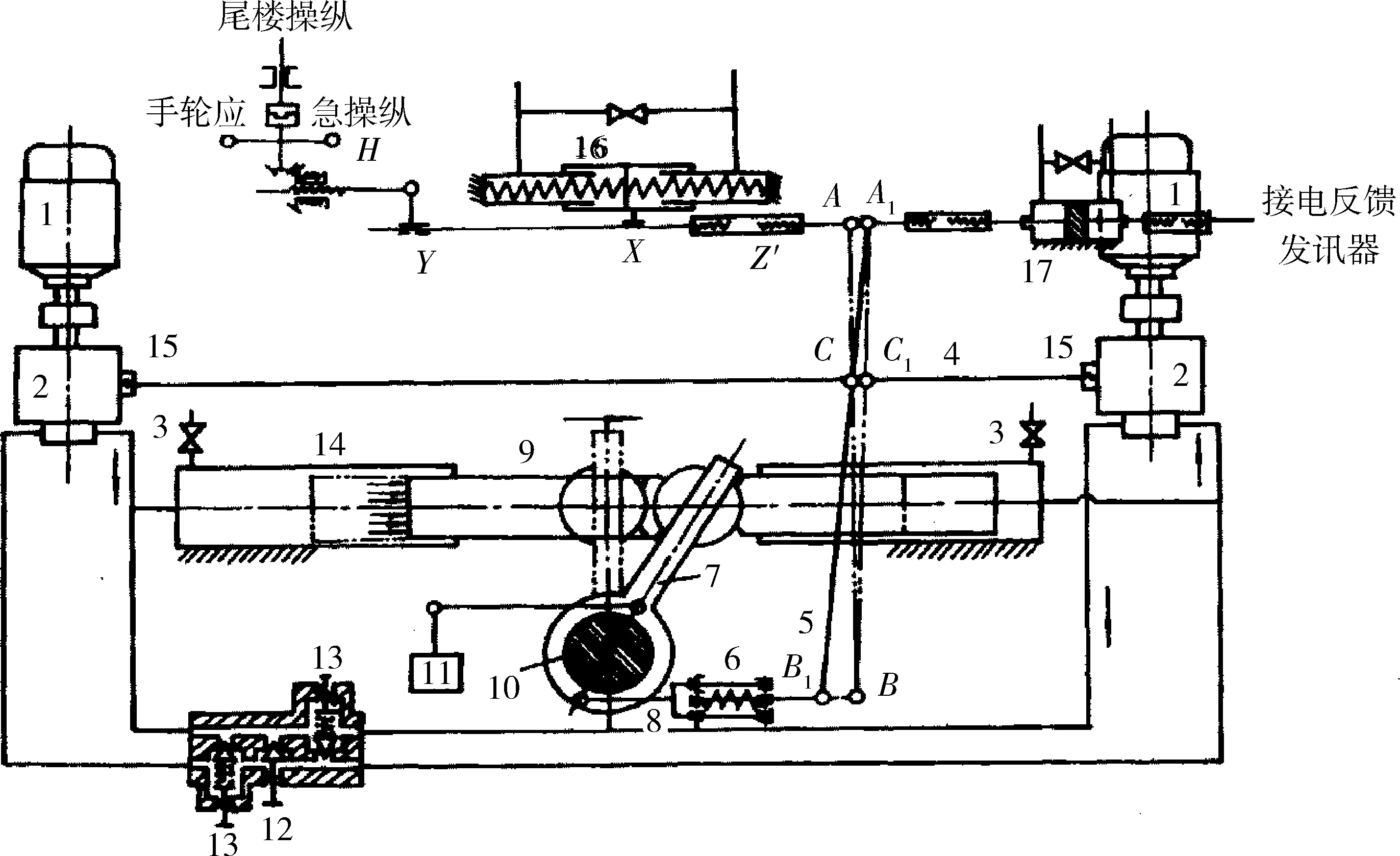
图1 液压舵机工作原理图(摘自百度图片)1-电动机,2-双向变量泵,3-放气阀,4-变量泵控制杆,5 -浮动杆,6 -储能弹簧,7-舵柄Tiller,8-反馈杆,9-撞杆,10-舵杆,11-舵角指示器的发送器,12-旁通阀,13-安全阀,14-转舵油缸,15-调节螺母,16 -液压遥控受动器,17-电气遥控伺服油缸。Fig.1 Hydraulic steering gear schematic diagram(from Baidu Image)1-Motor, 2-Bidirectional variable pump;3-Release valve, 4-Variable pump control lever, 5-Floating pole, 6-Energy storage spring, 7-Tiller, 8-Feedback lever, 9-Striker, 10-Rudder bar, 11-Rudder angle indicator transmitter, 12-Bypass valve, 13-Safety valve, 14-Rudder cylinder, 15-Adjusting nut, 16-Hydraulic remote control actuator, 17-Electrical remote control servo cylinder.
图1显示的舵机采用的是双电动机,这在船长在45 m以上的船上使用较普遍,但渔船大多属于小型的渔船即船长都在45 m以下,转舵扭矩不需要很大,因此很多渔船都利用柴油机的结余能采用主机轴带方式驱动油泵,代替双电动机中的一个电动机。因此在舵机试验过程中既要试验电动机输出的稳定性,还要试验舵机在主机轴带过程中的性能,包括主机转速的变化对舵机的影响、主机正车倒车对舵机的影响,特别是主机在倒车过程中会引起相序的变化所带来的影响。
1.2 影响舵机性能的关键参数
1)舵扭矩
液压舵机通过舵柄来转动舵杆,从而实现船舶航向的改变,转舵扭矩就是驱动舵杆所需要的力矩。因此对于不同的船,需要不同的转舵扭矩,一般船越大,所需扭矩也越大。
2)转舵角度
船舶在航行过程中需要改变航向,是通过转动船舵来控制。过大或过小的转舵角度都会影响船舶的航行安全。
3)转舵时间
转舵时间系指船舶舵机转动一定的角度所用的时间,反映了舵叶、转舵机构和控制系统的综合响应和执行能力。在标准CB/T 972—1994《海洋船舶液压舵机》中对其的定义为“舵从一舷35°转至另一舷30°所需的时间”。并且规定了这一时间不得大于28 s。
2 国内现行舵机标准概述
目前国内与舵机产品相关的有效标准共有5个,其中3个针对技术要求,1个针对试验方法和1个针对安装技术要求,具体如表1所示。
5个标准使用时间最短的也已经14年,而最长的则已经使用了35年,其中3个标准为CB中国船舶行业标准,都是通用标准;1个为国家推荐性标准,只适用于小舰艇;另1个是SC渔船行业标准,是关于渔船舵机安装技术的标准,其内容主要为规定舵机在渔船上的安装质量以及安装后对于液压系统的试验要求,对于工厂试验没有参考价值,另外此标准主要适用于16 kN往复式液压舵机和30 kN推杆式液压舵机,范围很窄。虽然对于舵机,无论是渔船舵机还是其他船的舵机其基本原理大致相同,但在一些操纵使用、性能要求上还是有较大差异,因此需要对标准的适用性进行研究,如有必要则需要制订适用于渔船的SC标准。
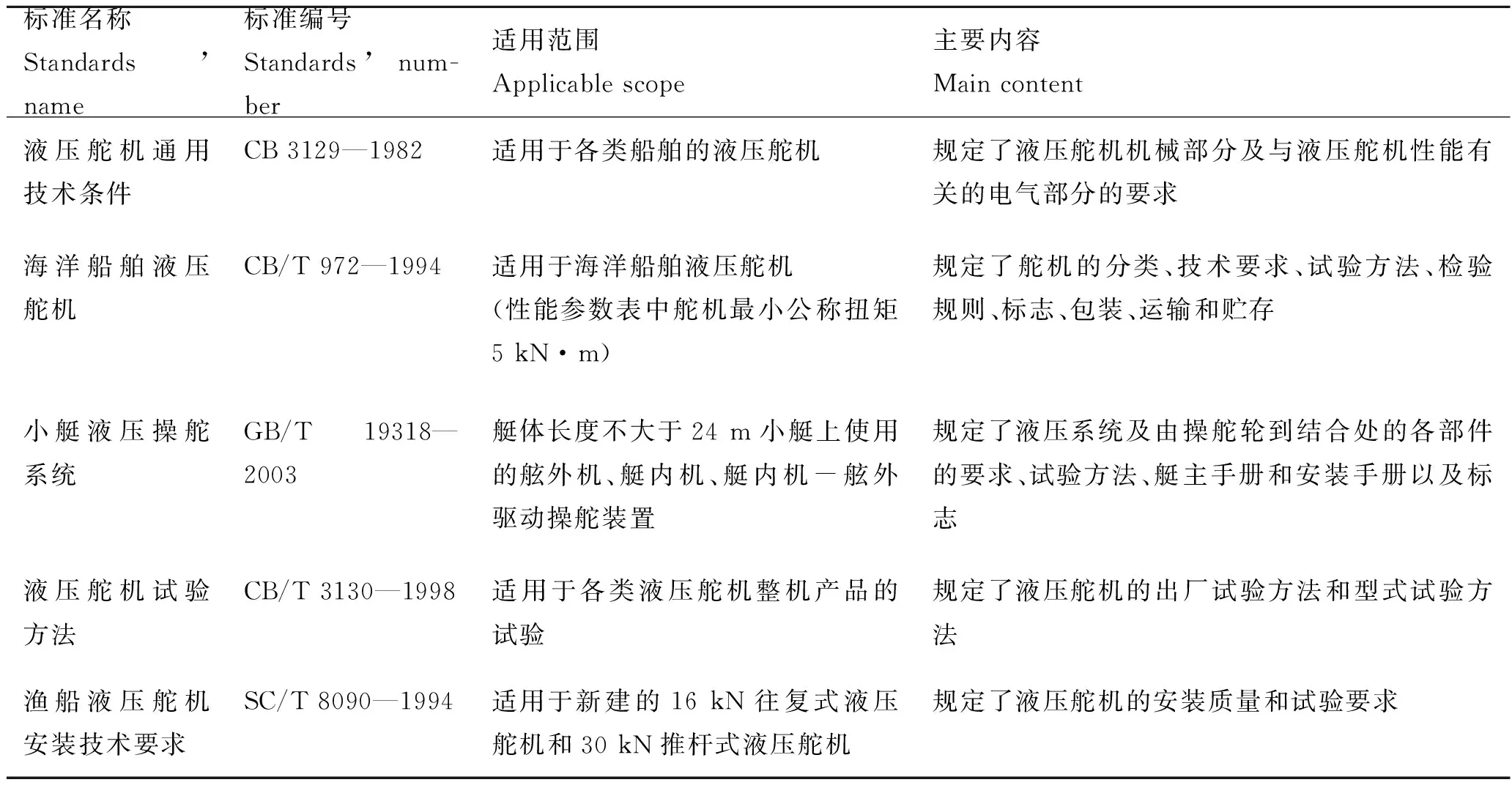
表1 舵机标准基本情况Tab.1 The basic performance of the steering gear standards
3 渔船用舵机标准适用性研究
3.1 舵机扭矩适用范围有限
液压舵机通过舵柄来转动舵杆,从而转动舵叶来实现船舶航向的改变,转舵扭矩就是驱动舵杆所需要的力矩。对于不同的船,需要不同的转舵扭矩,船越大所需扭矩也越大。在标准CB/T 972—1994《海洋船舶液压舵机》中对于这一参数有明确规定,舵机的最小扭矩为5 kN·m,而渔船特别是沿海的小型渔船一般舵机扭矩都在3 kN·m左右,而GB/T 19318—2003《小艇液压操舵系统》虽针对不大于24 m的小艇,但这一参数也未提及。可见CB/T 972—1994《海洋船舶液压舵机》此标准转舵扭矩参数并不能完全覆盖渔船[8]。
3.2 转舵角度定义不统一
舵机的主要功能就是转舵,因此转舵角度的重要性毋庸置疑,CB 3129—1982《液压舵机通用技术条件》标准中规定的要求适用于任何船只(包括大小渔船)。然而在GB/T 19318—2003《小艇液压操舵系统》中规定:舵在一舷30°到另一舷30°的时间不大于30 s;而在CB 3129—1982《液压舵机通用技术条件》中规定,舵机能从一舷35°转至另一舷35°,同样也规定了舵机机构需在液压缸内部也可在外部设置档块以限制转舵角度不超过±36.5°。另外,在CB 3129—1982《液压舵机通用技术条件》中对于转舵角度偏差也做了规定,不得偏差±1°,但在技术参数注解中又表示不大于28 s的转舵时间为一舷35°到另一舷30°所需的时间。由上可见,目前适用标准关于转舵角度的定义模糊,相互之间的不对应,对标准的使用者会造成困扰,因此修订势在必行,所有标准的定义应统一,在技术标准中,需要添加“定义”一个章节。
3.3 转舵时间适用性需商榷
船在航行过程中改变方向时易于在离心力的作用下发生倾斜,因此过快的转舵会加剧这一倾角,不利于船的复原,但是过慢的转舵又不利于船在航行过程中对可能会发生的紧急避让做出及时调整。CB/T 972—1994《海洋船舶液压舵机》标准上对于转舵时间只规定了上限不大于28 s,表面上的确适用于任何船只,但是不同船长和不同质量的船,达到这一标准的难易程度是不一样的。对于大船,上层建筑比较高,船的绝对重心偏高,转舵扭力很大,转舵时间一般需要26s左右;而对于中小型渔船是很容易达到这一要求,一般小型渔船转舵时间只需要10 s左右。渔船没有固定的航线,由于频繁转场作业的需求,经常出现紧急避让,因此需要渔船灵活,能够快速转舵。但过快的转舵又会引起浮心和稳心的改变,由此也常常会导致渔船侧翻现象,非常危险。综上所述,标准中对转舵时间的规定似乎并不是完全适用于渔船,渔船需要的是对过快操舵的限制措施,对不同扭矩的舵机限制油缸压力,防止过快的转舵发生危险。另外不同捕捞方式的渔船需要的转舵时间也不同,如蟹笼船,由于摆放的蟹笼较高,渔民又易于未按稳性手册摆放,重心偏高,28 s的转舵时间对其也是不合理的。
3.4 试验方法内容待完善
对于产品质量进行检验的核心是试验标准,技术标准中需要达到的技术参数与注意的技术要求应该在试验标准中采用相关试验一一复现,以保障舵机使用过程中的安全。在舵机出厂和型式认可时,一般只关注标准中的试验项目,因此试验标准中的试验项目应齐全,特别是安全项目。
3.4.1 技术要求未在试验方法中对应体现
CB/T 3130—1998《液压舵机试验方法》 其项目构成主要针对舵机的操纵,忽略了很多技术标准中舵机结构方面的要求,虽然舵的结构形式多样,很难逐一严格限制,但是对于安全要求都是一样的。结构的不合理性一般在工厂试验时不容易被发现,而在实船操纵时发生的故障通常都和结构设计有关,且在船上因不容易实时维修而造成安全事故。
1)如在CB/T 972—1994《海洋船舶液压舵机》技术标准中,为了防止舵机转动角度过大,避免船舶在航行中出现倾斜,在技术要求中提出“限制转舵角度不超过±36.5°的要求”[5],但是在试验方法标准中对于这一要求未明确试验方法,只是在检测项目“安全阀开启试验”中模糊地表示可以通过安全阀开启关闭达到限制控制角度的要求,但是其测试方法是让舵机碰倒左右机械限位装置观察空气开关情况,而舵角限位装置一般比最大工变标作角度大15°,因此这一检测项目并未达到试验36.5°限制有效性的效果。
2)如在CB/T 972—1994《海洋船舶液压舵机》技术标准中对主操舵装置规定可以有两种形式,其一为普遍使用的“两个独立和分开的动力转舵系统,每个系统都能完成舵的基本操纵”[5],这一系统在试验标准中有明确的试验方法;但是对于另一形式即“转舵机构及其管路可分隔成两部分也可合成一部分的动力传动系统”,在试验方法标准中只要求主辅管路的失压试验和故障转换,而无其他关键技术参数的试验项目。值得注意的是,由于小型渔船对于转舵扭矩与转舵时间的要求不高,第二种形式普遍存在于小型渔船中。
3)此外诸如放气、放液设施的设置与效用,液压流体清洁设备的效用等,在CB/T 972—1994《海洋船舶液压舵机》技术标准中有明确的规定而在试验标准CB/T 3130—1998《液压舵机试验方法》中都未设定具体的试验方法。虽然看似放气、放液设施、流体清洁设备的效果对于整个舵机系统来说可有可无,但一旦无法达到要求,就有可能造成油泵的积堵,而造成严重后果。
3.4.2 渔船舵机结构的特殊性试验方法未涉及
舵机试验主要参考标准为CB/T 3130—1998《液压舵机试验方法》,由于它属于船舶行业标准,主要是基于商船的舵机结构制定,并未将渔船舵机的特殊性纳入在内,因此在试验方法中只提到需要测试电动机的电压、电流、功率、转速。而渔船大多采用的是非电动的液压舵机,其由主副机直接拖动,因此存在着故障报警、驾驶室启停原动机以及液压油的冷却导致柴油机呈熄火状态等方面问题,这些在CB/T 972—1994《海洋船舶液压舵机》与CB 3129—1982《液压舵机通用技术条件》两技术标准中都未涉及,因此对于渔船舵机结构性能方面的检测,此标准实际上只适用其中一部分。
4 结论
综上所述,现行舵机相关标准虽然在基本性能参数以及功能上做出了相应规定,但是在标准之间的相互衔接对应方面还存在一定的问题,另外标准在制定之初并未基于渔船的特性以及忽略了渔船舵机的发展,缺少针对性内容。希望尽快能有针对渔船,适用于渔船舵机产品的标准出台,指导舵机生产商制造出安全可靠的渔船用舵机,保障广大渔民生产作业安全。
[1] 农业部渔业船舶检验局. 农渔检(产)〔2014〕1号渔业船舶船用产品检验管理规定[S/OL].(2014-01-02)http://www.cfr.gov.cn/zcfg_2/glwj/cpjy/201605/t20160 510_184359.htm.
[2] 林德辉.GB/T 19318—2003 小艇液压操舵系统[S].中华人民共和国国家质量监督检验检疫总局:中国标准出版社,2003.
[3] 崔若松.CB/T 972—1994 海洋船舶液压舵机[S].中国船舶工业总公司:中国标准出版社,1994.
[4] 崔若松. CB 3129—1982 液压舵机通用技术条件[S].全国船舶标准技术委员会:中国标准出版社,1982.
[5] 廖先志.CB/T 3130—1998 液压舵机试验方法[S].中国船舶工业总公司:中国标准出版社,1998.
[6] 梁炳球.SC/T 8090—1994 渔船液压舵机安装技术要求[S].全国渔船标准技术委员会:中国标准出版社,1994.
[7] 梁福权,黄应邦,林锡坤,等.船舶液压舵机的安全检查及故障分析[J].中国水运月刊, 2013,15(11):156-157.
[8] 王嘉立.我国渔船小型液压舵机合理型式的探讨[J].渔业现代化, 1984,11(3):35-39.
Studyonapplicabilityofsteeringenginestandardforfishingvessels
CAO Jianjun*,CHEN Yinjie
(Fishery Machinery and Instrument Research Institute, Chinese Academy of Fishery Sciences, Shanghai 200092, China)
The steering gear of a fishing vessel is of great significance to ensure the vessel′s turning and heading stability, which is one of the key devices for safe navigation. The proper standards is benifical to assure quality of the vessels. This paper analyzes the structure and performance parameters of the steering gear at fishing vessels, and matchs between current technical standards and method standards. We found that the the current standards were unapplicable to the steering engine of the Chinese fishing vessels. Also, technical standards and method standards did not match each other, which may cause missed detection on key items, and even the gear stagnation. Thus, a set of product standards is urgent needed, whose guide to product safe, practical and reliable steering gears for manufacturers is to protect the safety for fishermen in fishing activities. [Chinese Fishery Quality and Standards, 2017,7(5):60-64]
fishing vessel;steering engine;standard; applicability
CAO Jianjun, caojianjun@fmiri.ac.cn
10.3969/j.issn.2095-1833.2017.05.010
S972.7
A
2095-1833(2017)05-0060-05
2017-05-24;接收日期2017-08-15
中央级公益性科研院所基本科研业务费专项(2016YJS-ZX0300,2016YJS-ZX0304)
曹建军(1982-),男,本科,工程师,研究方向为渔船电气设计及图纸评审,caojianjun@fmiri.ac.cn