一种新型多智能体固定目标控制算法①
2017-11-01秦补枝
秦补枝
(南京科技职业学院自动控制系)
一种新型多智能体固定目标控制算法①
秦补枝
(南京科技职业学院自动控制系)
提出一种新型的多智能体固定目标控制算法。某个智能体到达固定目标的附近区域时,在该智能体与目标之间增加反馈控制器,使得智能体与固定目标之间的通信量减少。最后通过仿真证明了该算法的有效性。
多智能体 固定目标 控制算法
随着计算机技术和通信网络的迅速发展,复杂网络的研究已经渗透到很多方面,如疾病的传播、交通运输及电力传输等。研究者从复杂网络理论的角度对它们进行分析研究,将这些问题归纳为一个复杂网络系统,每一个执行环节作为一个节点,并且为智能节点,具有复杂动力学行为,由这些节点组成的网络行为就变得异常复杂。因此,分析和控制这些网络的复杂行为成为研究的热点之一[1~18]。 由于网络的拓扑结构和动力学行为相互影响,使这个问题更加难以解决。特别是通过对网络中的少数节点增加线性误差反馈控制,使得整个网络稳定到一个均匀的平衡点状态,即网络中的每个节点的状态都稳定到单个节点的平衡点上[1~3]。这种控制方法增加了每一时刻节点之间的通信量,不易实现。为了减少智能体与固定目标之间的及时通信量,笔者提出了一种基于事件驱动的固定目标跟踪策略,即当某个智能体的状态与固定目标的状态接近时,对该智能体施加反馈控制,使得智能体与固定目标之间的通信量减少,跟踪速度加快,提高跟踪效率。
1 基于事件驱动的多智能体固定目标跟踪方法
假设一个网络由N个相同的节点组成,构成了连续时间耗散耦合的动态网络,其中第i个节点的状态方程为:

(1)


当t→∞时:
x1(t)=x2(t)=…=xN(t)=s(t)
(2)

智能体i的事件驱动函数定义为:
αi(t)=‖xi(t)-s‖-β,i=1,2,…,N
(3)
其中β>0 ,‖·‖ 代表欧几里德范数。 笔者设计的控制率为:
ui(t)=-γicμ(xi(t)-s)
(4)
其中μ是跟踪目标与智能体之间的耦合强度;γi由事件驱动函数αi(t) 的符号决定:
(5)
定义矩阵B为:
B={bij}N×N=A-μ·diag[γ1(t),γ2(t),…,γN(t)]
(6)
由文献 [1,2]可知矩阵B是负定,其特征值可以写为0≥λ1(B)≥λ2(B)≥…≥λN(B)。因为事件驱动函数的存在,使得在某些时刻存在所有的智能体都不在跟踪目标的吸引区域内,而不触发事件驱动函数,因此有可能使得式(6)的第2项为0,导致矩阵B的最大特征值为0。
定理1 考虑多智能体(1),其控制输入(4)在事件驱动函数(5)的作用下,如果矩阵Df(s)+ηIn×n的所有特征值具有负实部,则该多智能体系统能够局部指数稳定到系统的独立状态(2)中的s。其中In×n为n维单位阵,η<0。有:
cλ1(B)≤η
(7)
证明将式(1)在平衡点s附近进行线性化得到:

(8)
其中Df(s)∈Rn×n是函数f()在s上的雅可比矩阵,φ=(φ1,φ2,…,φN)T,φi(t)=xi(t)-s。
由式(6)知:
Bφi=λi(B)φi,i=1,2,…,N
(9)
将式(9)代入式(8)得到:

=(Df(s)+cλi(B)I)φi
(10)
i=1,2,…,N
由于0≥λ1(B)≥λ2(B)≥…≥λN(B),即只需要满足(Df(s)+cλ1(B)I)<0即可使得式(10)中的N个方程式满足指数稳定的条件。由式(7)可知,对于一个非线性函数,其雅可比矩阵可以确定得到,这样选择合适的节点之间的耦合强度c可使得N个方程式满足指数稳定。
在系统的初期,可能会存在所有智能体的状态都不能触发事件驱动函数,即所有的节点状态与所需要达到的固定目标距离比较远,此时对应的λ1(B)=0,因此式 (7)不能写成:

(11)
为了能在系统初始时对选择智能体之间的耦合强度提供一个依据,笔者建议系统初始的耦合强度取为:

(12)
其中ν>0为一个无穷小的正数。
由于混沌系统存在各态历经性,随着时间的推移,必然有智能体的状态接近固定目标,从而触发事件驱动函数,使得整个系统能够达到跟踪固定目标的目的。
2 仿真结果
复杂动态网络中单个节点的状态为典型的陈系统,其动力学方程为:
(13)
此时,陈系统节点为一个混沌系统(图1)[19]。

图1 混沌的陈系统示意图
令式(13)右端等于零,得到陈系统的一个平衡点(7.9373, 7.9373,21),将它作为本次仿真的固定目标。
考虑一个经典的由100个节点组成的BA无标度网络模型,它的生成算法可参考文献[20],初始节点为3个,每增加一个节点增加3条边,单个节点的动力学为陈系统。
假设每个节点代表一个智能体,它要跟踪的目标为100个智能体的平均状态。在图2、3中,采用的是相同的无标度网络模型,并且节点和跟踪目标之间的耦合强度都设为12,每个智能体的初始状态都随机分布在[-5,5],只有事件驱动函数的参数β发生了变化。

a. xi1

b. xi2

c. xi3

a. xi1
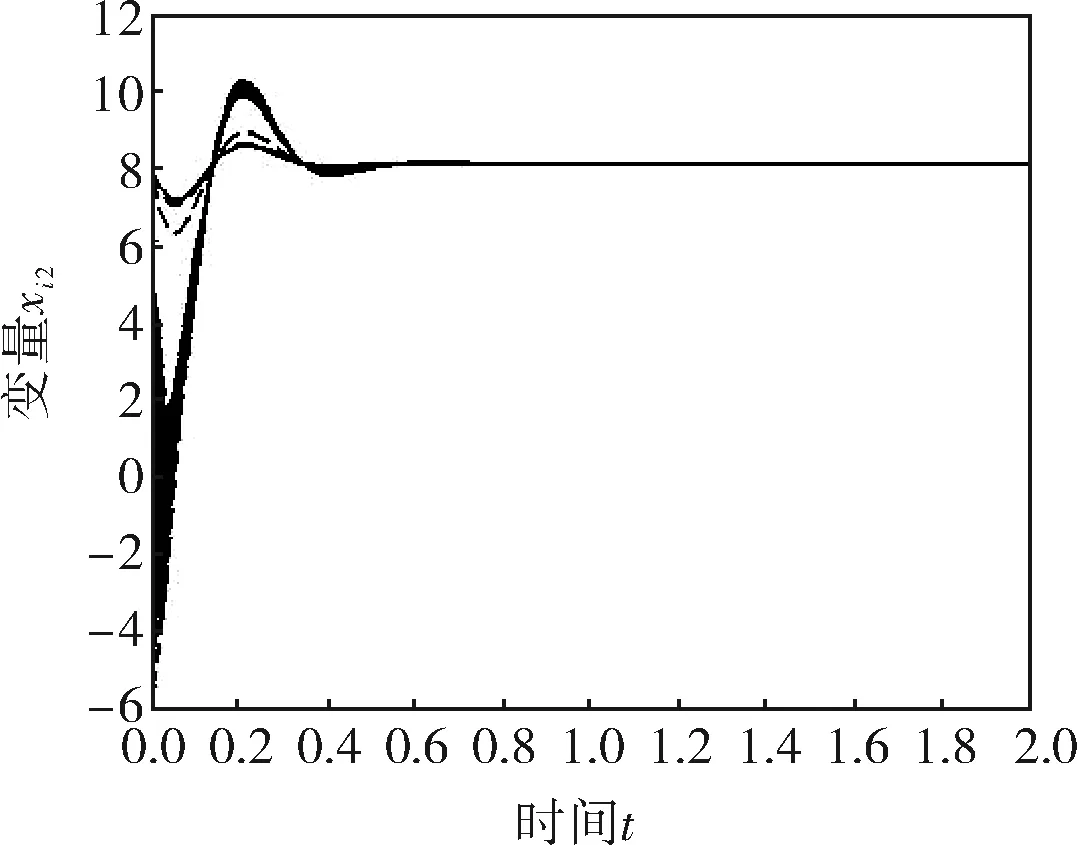
b. xi2

c. xi3
仿真结果表明,所有的智能体都能很好地跟踪固定目标。通过对比图2、3,不难发现事件驱动函数的发生阈值β越大,多智能体越早完成了跟踪任务。
3 结束语
提出一种新型的基于事件驱动的多智能体固定目标跟踪算法。理论和仿真结果表明,随机分配系统中所有智能体的初始状态,经过一段时间的调整,最后系统能够跟踪到目标,并且进入稳定状态。即该固定目标跟踪控制算法是切实可行的。
[1] Wang X F, Chen G R.Pinning Control of Scale-free Dynamical Networks[J]. Physica A:Statistical Mechanics and Its Applications,2002, 310(3-4):521~531.
[2] Li X, Wang X F,Chen G R.Pinning a Complex Dynamical Network to Its Equilibrium[J].IEEE Transactions on Circuits and Systems I: Regular Papers,2004, 51(10):2074~2087.
[3] Lu W L, Chen T P. New Approach to Synchronization Analysis of Linearly Coupled Ordinary Differential Systems[J].Physica D:Nonlinear Phenomena, 2006, 213(2):214~230.
[4] Olfati-Saber R,Jalalkamali P.Coupled Distributed Estimation and Control for Mobile Sensor Networks[J].IEEE Transactions on Automatic Control, 2012, 57(10):2609~2614.
[5] Gupta R, Bandyopadhyay B, Kulkarni A M.Power System Stabilizer for Multi-machine Power Systems Using Robust Decentralized Periodic output Feedback[J].IEEE Proceedings of Control Theory and Applications, 2005,152 (1):3~8.
[6] Chen T P, Liu X,Lu W L. Pinning Complex Networks by a Single Controller[J].IEEE Transactions on Circuits and Systems I-Regular Papers,2007, 54(6):1317~1326.
[7] Zhan M, Gao J H,Wu Y,et al.Chaos Synchronization in Coupled Systems by Appling Pinning Control[J].Physical Review E, 2007, 76:36203.
[8] Lu W L. Adaptive Dynamical Networks via Neighborhood Information:Synchronization and Pinning Control[J].Chaos: An Interdisciplinary Journal of Nonlinear Science, 2007, 17(2):23122.
[9] Zhou J, Lu J A,Lu J H. Pinning Adaptive Synchronization of a General Complex Dynamical Network[J].Automatica,2007, 44(4):996~1003.
[10] Sorrentino F,Bernardo M D,Garofalo F,et al. Controllability of Complex Networks via Pinning[J].Physical Review E,2007, 75:46103.
[11] Amaral L A N,Guimera R. Lies, Damned Lies and Statistics[J].Nature Physics,2006, 2(2):75~76.
[12] McGraw P N, Menzinger M. Clustering and the Synchronization of Oscillator Networks[J].Physical Review E,2005, 72:15101.
[13] Kim B J. Performance of Networks of Artificial Neurons: The Role of Clustering[J].Physical Review E,2004, 69:45101.
[14] Li X, Chen G R.A Local-world Evolving Network Model[J].Physica A: Statistical Mechanics and Its Applications,2003, 328(1-2):274~286.
[15] Barrat A, Weigt M. On the Properties of Small-world Network Models[J].European Physical Journal B,2000, 13(3):547~560.
[16] Boccaletti S, Latorab V, Moreno Y,et al.Complex Networks:Structure and Dynamics[J].Physics Reports,2006, 424(4-5):175~308.
[17] Li X, Wang X F.Controlling the Spreading in Small-world Evolving Networks: Stability, Oscillation,and Topology[J].IEEE Transactions on Automatic Control,2006, 51(3):534~540.
[18] Restrepo J G, Ott E,Hunt B R.Onset of Synchronization in Large Networks of Coupled Oscillators[J].Physical Review E,2005, 71:36151.
[19] Chen G, Ueta T.Yet another Chaotic Attractor[J]. International Journal of Bifurcation and Chaos,1999,9(7): 1465~1466.
[20] Barabasi A L. Linked: The New Science of Networks[M]. Massachusetts: Persus Publishing,2002.
ANovelControlAlgorithmforMulti-agentFixedTarget
QIN Bu-zhi
(DepartmentofAutomation,NanjingPolytechnicInstitute)
A novel control algorithm for multi-agent fixed targets was proposed. When an agent reaches the region nearby the fixed target, adding a feedback controller between this agent and the tracking target can reduce communication load there effectively. Simulation result proves effectiveness of this algorithm proposed.
multi-agent, fixed target, control algorithm
TP393
A
1000-3932(2017)03-0258-04
江苏省2014年青蓝工程资助项目;江苏省第五期“333高层次人才培养工程”培养对象项目。
秦补枝(1975-),副教授,主要从事非线性控制和复杂网络分析与控制方向的研究,68084819@qq.com。
2016-09-26)
