基于卫星定位信号的车辆行驶里程计算方法①
2017-10-20郝汪洋罗东锋
郝汪洋 ,申 飞 ,张 俊 ,罗东锋 ,刘 静
1(中国科学院 强磁场科学中心,合肥 230031)2(中国科学技术大学,合肥 230026)
基于卫星定位信号的车辆行驶里程计算方法①
郝汪洋1,2,申 飞1,张 俊1,罗东锋1,2,刘 静1,2
1(中国科学院 强磁场科学中心,合肥 230031)2(中国科学技术大学,合肥 230026)
本文针对当前各种车联网应用服务中,基于车辆实时经纬度信息的里程计算与统计误差问题,提出一种低采样频率下的车辆行驶里程计算方法.首先对起点进行信任度验证,消除起点漂移带来的影响; 然后采用连续大角度过滤、大距离过滤、大速度过滤、大加速度过滤相结合的方法进行噪点过滤; 在此基础上,采用速度插值与角度插值相结合的方法对弯道进行里程补偿; 另外,针对丢点数据,采用基于路径规划的电子地图调用方式进行里程补偿,进一步提高算法的准确性.经实验验证,在较低的位置信号采样频率下,该方法仍有较高的里程计算精确度和执行效率.
里程计算; 车联网; 起点校验; 信任度; 弯道补偿
物联网技术的飞速发展及不断普及,日益深刻地影响着人们的生活.车联网[1,2]技术作为物联网[3]技术在交通领域中的分支,以全球定位系统以及无线通信技术为基础,利用手持或者车载无线定位设备实时获取车辆信息[4],为用户提供综合服务.例如在日常生活中,网约车平台的兴起在为人们出行提供便利的同时,在一定程度上减少了资源的浪费,降低了环境污染; 在政企事业公务用车管理中,车辆管理信息平台可方便的实现车辆的监督管理,通过平台进行合理调度可以减少车辆的空载率,提高车辆的使用效率[5].
车辆行驶里程计算作为车联网应用的一个基础服务,为车联网多种业务应用提供支撑.例如,打车软件基于里程进行计费,物流公司的油费管理,公务用车的费用计算与透明化监督等.因此,如何实现车辆行驶里程的精准计算有着很高的应用价值.传统的车辆行驶里程计算方法主要有曲线拟合法、拓扑法和图元计算法等[6],但它们都具有算法复杂度较高的缺点,并不适用于当前车联网技术与云计算、大数据融合应用场景下,终端接入规模大,计算量高的车辆管理云服务平台.相比传统的里程计技术,基于图像处理的视觉里程计[7]具有使用场景更多、计算更精准等特点.根据系统所配置相机数其可以分为单目视觉里程计[8]和立体视觉里程计[9].但视觉里程计的装备成本较高,暂时并不适合于大规模车辆行驶里程的计算.为满足当前各种车辆管理平台在云计算平台上集中部署条件下,车载终端高并发接入、大规模计算的要求,本文利用卫星定位系统,采用折线累加的方式实现里程计算[10].
在基于经纬度数据计算和统计车辆行驶里程时,由于建筑物反射,信号测量误差等原因,容易出现“漂移”(是指采集到的实时定位点在真实坐标位置附近波动)现象; 尤其是在车辆启动时,由于电压不稳或者位于信号盲区等原因,容易造成起始点的定位漂移,而起点的漂移对后期噪点过滤以及里程计算会产生较大的影响; 高速行驶的车辆在转弯时若仍采用传统的坐标累积计算方法,容易出现较大的误差; 天气、隧道、车载终端断电等原因,会出现较大范围的信号丢失现象,也易造成里程计算出现严重误差.提高经纬度数据的采集频率可以在一定程度上降低上述因素带来的干扰,提高里程计算的准确度.然而由于高频率数据采集会对卫星定位信号的接收、存储与计算带来很大的挑战[11],无形中增加了系统构建的成本,不满足集中部署的车辆管理云服务平台大规模数据存储、计算要求.因此,本文提出一种针对低信号采样频率下的车辆行驶里程计算方法,在保证计算结果准确度的同时,降低算法的复杂度.
1 方法概述
针对车辆行驶里程计算中由起点漂移、噪点干扰、车辆转弯和轨迹丢点等原因所导致的里程计算不准问题,本文设计并实现了一种基于卫星定位信号的车辆行驶里程计算方法.方法总体框图如图1所示,主要由起点校验、噪点过滤、弯道补偿和丢点补偿四部分构成.输入为低采样频下获取的车载终端数据集合每个数据包含车牌号、时间、经度、纬度、车辆所在单位、速度六个维度.首先采用基于信任度的校验方法对起点进行合理性验证; 之后采用连续大角度、大距离、大速度、大加速度过滤相结合的方法进行噪点过滤; 然后采用速度插值与角度插值相结合的方法对弯道数据进行补偿; 特别地,针对大范围的丢点情况,采用基于路径规划的方式进行丢点补偿,以得到更加精准的里程数据.
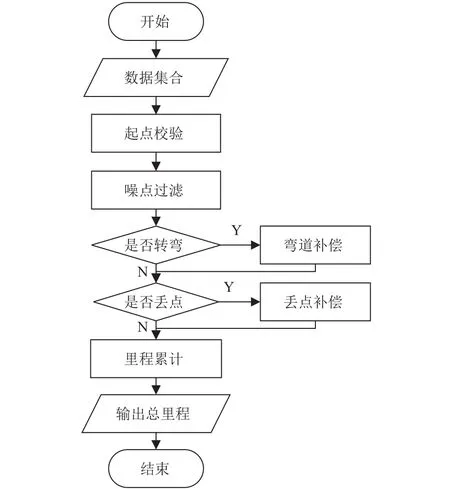
图1 方法总体框图
2 各模块的算法设计与实现
2.1 起点校验
取出前10个信号,根据各点距离起点的时间间隔将第2点至第10点分别赋予权重根据起点被其它各点的信任程度来综合计算起点的信任度.为了量化各点之间的信任程度,定义置信距离测度d1n,如式(1).

其中,v1,vn分别表示起点和第n点的瞬时速度,为两点间时间差,l1n为 两点间欧式距离.当d1n在合理的阈值范围内时,说明第n个点对起点起支持作用; 反之则称第n个点到起点是不可信的.

图2 起点校验示意图
起点和其余各点的置信距离测度构成一个一维矩阵Dn,称为置信距离矩阵:

置信距离矩阵描述了各点对起点的支持程度,d1n的置信阈值可由经验获得,本文取于是可以定义各点到起点的关系矩阵Rn:

2.2 噪点过滤
将起点信号进行校验后,本文以大速度过滤、大加速度过滤和大距离过滤相结合的方法进行噪点过滤,并提出了连续大角度过滤的策略,具体流程如图3所示.其中大速度过滤、大距离过滤、大加速度过滤是以所采集信号的速度、时间等为条件进行其合理性验证,将不满足条件的信号进行过滤.
2.2.1 定义
定义1.航向角:表示连续两个采样点的行驶方向与纬度之间的夹角.
定义2.航向角度差:表示三个采样点所形成的航向的夹角.

图3 噪点过滤流程图
2.2.2 连续大角度过滤
在车辆静止或者缓慢行驶时,由于信号的漂移特性,会出现所获取的信号在实际位置周围无规律波动的现象,如图4所示.

图4 连续大角度过滤
(1)首先根据信号的经纬度计算其航向,取相邻两点A、B,其中A经纬度坐标计为经纬度坐标计为根据公式(4)计算其航向角度.

(2)根据上述公式计算连续三个信号的航向角度差,如图4中,ABC三个采样点的航向角度差为139.14°;
(3)当连续三个采样点航向角度差大于 90°时,计数器加1,同时继续计算航向角度差,当计数器大于等于3时则判定信号出现漂移,对其进行过滤.
2.3 弯道补偿
传统的折线累加法进行里程计算并未考虑转弯引起误差,如图5(a)所示.而曲线拟合、样条插值等方法的复杂度较高,并不不适用于大规模的车辆管理系统.因此本文提出了角度插值与速度插值相结合的弯道补偿算法.
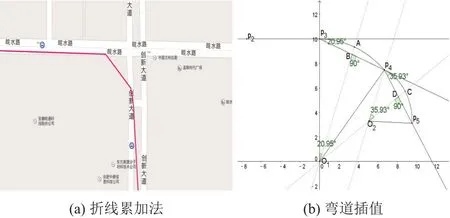
图5 弯道补偿
车辆在进行转弯时其运行轨迹类似于一段圆弧,根据转弯角度的不同其补偿大小不同,如图5(b)所示.具体算法流程如下:
第1步.根据公式(4)计算连续两点航向角;

其中v2和v3为p2、p3两点速度,PI为圆周率,为p2、p3两点时间差,L为p2、p3两点欧式距离,和 β分别为速度权重和角度权重.
2.4 丢点补偿
针对由于阴天、车载终端断电等原因所导致的大范围丢点问题,本文采用基于路径规划的里程补偿方
法进行里程补偿,算法如下:
输出:里程补偿值L
//计算每两点之间的欧式距离
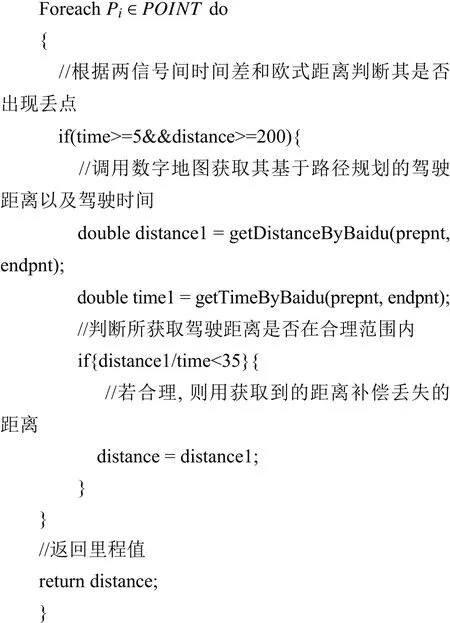
通过基于数字地图调用的里程补偿方法,在一定程度上解决了由于大范围丢点所导致的里程计算不准问题.如图6 所示,(a)中定位信号发生丢点现象,(b)中通过基于路径规划策略的数字地图调用方法对里程数据进行补偿,提高了里程计算的精确率.

图6 弯道补偿
3 实验结果及分析
3.1 数据采集及测试环境
本文通过车载终端进行位置数据的采集,采样频率分别为 10、20、30秒.所采集数据的格式为:CarID,DAOTime,Longitude,Latitude,Company,v.其中CarID 为车牌号,DAOTime 为信号生成时间,Longitude,Latitude 为信号经纬度,Company 为车所在单位,v 为车辆速度.
测试环境为普通PC机,配置如下:
CPU:主频 3.1 GHz 四核; 内存:8 GB
磁盘:500 GB; 软件环境:JDK1.8.0_65、mysql5.6
3.2 准确度测试
本文使用Java编程语言进行算法实现,首先进行算法准确度的测试.针对建筑物、天气、隧道等行驶环境对车辆里程计算的影响,本次测试共使用四辆车作为测试标本,采样间隔为 10 s,其中车辆 No.1、No.2、No.3为城市中普通上下班测试,车辆No.4为长途测试,车辆No.3行驶环境多为市内建筑比较密集区域.所获得的轨迹图如图7所示,图中红色痕迹为车辆行驶轨迹.以单次行程作为最小单元对车辆轨迹进行分割,得到多组测试轨迹样本数据,如表1所示.
为对比不同采样频率下的实验效果,将采样间隔为10秒的数据进行抽稀,获得采样间隔为30秒的数据.以车辆码表数为基准,对比本文所提方法与传统折线累加法的实验结果,如表2 所示.由表可见,在不同采样率,本文方法较传统折线累加法的里程统计误差均得到明显降低,且在不同的测试环境下,均有较高的里程计算准确率.
3.3 效率测试
执行效率是衡量算法能够适用于大规模系统平台的基本条件,本文以算法执行时间作为衡量算法执行效率的指标.表3为对比本文方法与传统折线累加法的实验结果,由表3可见:本文方法在不同采样频率下的执行效率与传统折线累加法相近.
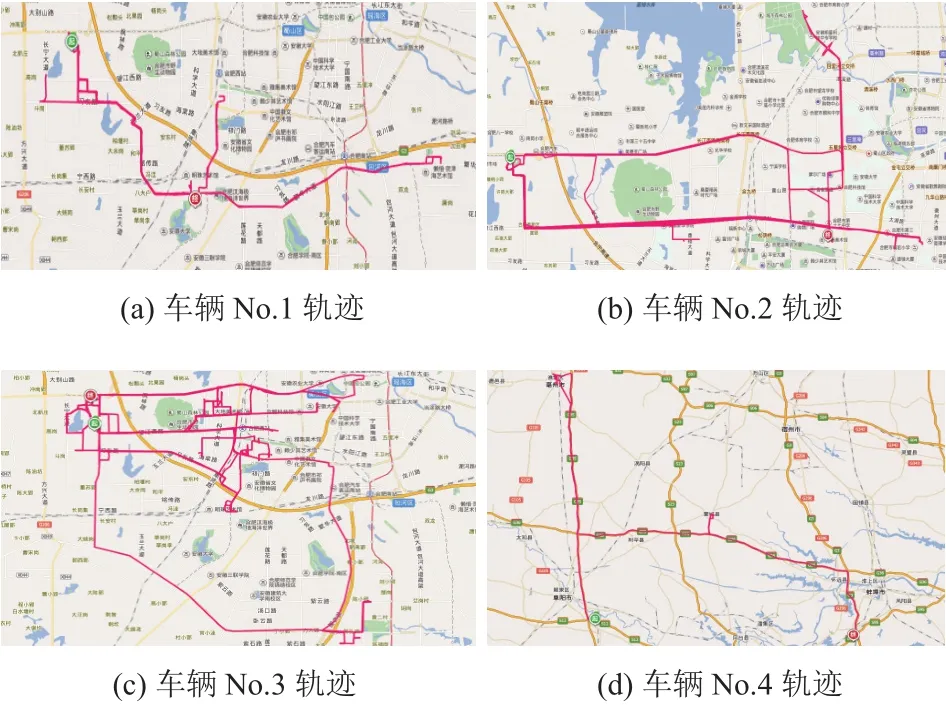
图7 测试轨迹图

表1 卫星定位信号采集数据集
综上所述,较传统折线累加法,本文所提算法在保证较高执行效率的同时,具有更高的里程统计精度.
4 结语
在车联网技术飞速发展的今天,随着集中部署的车辆管理云服务平台的建设,设计一个低复杂度高精确度的车辆行驶里程计算方法将有效地提高平台的运行效率.基于此,本文提出了一种基于经纬度数据的车辆行驶里程计算方法.该方法可以有效地解决由于起点漂移、车辆转弯、丢点等问题导致的里程计算不准问题.实验结果表明该方法在保证算法的同时能有效地提高车辆行驶里程计算的精度.

表2 算法准确度测试结果

表3 算法执行时间测试结果
1刘小洋,伍民友.车联网:物联网在城市交通网络中的应用.计算机应用,2012,32(4):900–904.
2Gerla M,Lee EK,Pau G,et al.Internet of vehicles:From intelligent grid to autonomous cars and vehicular clouds.Proc.of 2014 IEEE World Forum on Internet of Things (WFIoT).Seoul,Korea.2014.241–246.
3王保云.物联网技术研究综述.电子测量与仪器学报,2009,23(12):1–7.
4孙棣华,刘卫宁,宋伟.一种适于智能交通系统的交通信息采集及监控系统.电子技术应用,2002,28(1):33–35.
5张李勇,腾继涛,张飞舟.基于GPS的运营车辆监控调度.计算机工程,2004,30(1):48–49,57.
6方涛.利用GPS统计车辆行驶里程的方法研究[硕士学位论文].南京:东南大学,2003.
7李宇波,朱效洲,卢惠民,等.视觉里程计技术综述.计算机应用研究,2012,29(8):2801–2805,2810.
8郭磊,徐友春,李克强,等.基于单目视觉的实时测距方法研究.中国图象图形学报,2006,11(1):74–81.[doi:10.11834/jig.20060112]
9康轶非,宋永端,宋宇,等.动态环境下基于旋转-平移解耦的立体视觉里程计算法.机器人,2014,36(6):758–768.
10任赋,陈挺,黄运峰,等.一种基于无线网络和 gps 位置信息实时统计汽车行驶里程的方法:CN,CN101470012.2009-07-01.
11李娜,李阳,魏大利,等.一种里程计算的自适应修正方法:CN,CN102981173A.2013-03-20.
Vehicle Mileage Calculation Method Based on Satellite Positioning Signals
HAO Wang-Yang1,2,SHEN Fei1,ZHANG Jun1,LUO Dong-Feng1,2,LIU Jing1,21(High Magnetic Field Laboratory,Chinese Academy of Sciences,Hefei 230031 China)2(University of Science and Technology of China,Hefei 230026,China)
Aiming at the problem of mileage calculation and statistical error based on vehicle real-time latitude and longitude information in the current application of vehicle networking,this paper presents a method of computing the vehicle mileage under low frequency of signal sampling.Firstly,the trustworthiness of the starting point is verified to eliminate the influence of the starting point drift.Secondly,the continuous large-angle filter,large distance filter,large speed filter,and large acceleration filter are combined to eliminate the noise.On this basis,velocity interpolation and angular interpolation are combined to compensate for the curve.In addition,for the lost data,mileage compensation is made based on the path planning method of electronic map calls,to further improve the accuracy of the algorithm.Experiments show that this algorithm still has high accuracy and efficiency at the lower position signal sampling frequency.
mileage calculation; internet of vehicle; starting point calibration; degree of trust; curve interpolation
郝汪洋,申飞,张俊,罗东锋,刘静.基于卫星定位信号的车辆行驶里程计算方法.计算机系统应用,2017,26(10):201–206.http://www.c-sa.org.cn/1003-3254/6010.html
国家自然科学基金(61273323)
2017-01-18; 采用时间:2017-02-23
