基于矢量控制的果套自动分离机控制系统设计
2017-10-17韩雨航
宁 铎, 韩雨航
(陕西科技大学 电气与信息工程学院, 陕西 西安 710021)
基于矢量控制的果套自动分离机控制系统设计
宁 铎, 韩雨航
(陕西科技大学 电气与信息工程学院, 陕西 西安 710021)
目前国内苹果分选生产线中,清洗消毒工序仍然采用人工手动方式分离苹果与保护网套,效率低且成本较高.针对该问题,设计了一种果套自动分离装置;该装置可使果套分离工序摆脱人工手动完全由机械代替,采用永磁同步电机驱动装置运行,并设计永磁同步电机矢量控制系统控制执行机构运动,以此对机械部分实现智能控制.果套自动分离机不仅能极大加快果套分离工序的工作效率,还能提高整体苹果分选生产线的自动化程度.同时该技术还可以应用于其他有脱套需求的鲜果分选生产线,为鲜果工业的自动化发展做出了新的尝试.
果套分离; 矢量控制; 永磁同步电机; 鲜果分选
Abstract:The domestic production line of apple sorting still choose manual mode to separate the fruit set,leading to low productive efficiency and high cost of the fruit products.To solve this problem,this paper introduces a kind of automatic fruit set separation device.This device completely replaces the manual operation by running the permanent magnet synchronous motor with designed vector control system,which could realize the intelligent control of the mechanical working system.This fruit set device could not only greatly enhance the working efficiency of the production line,but also improve the automation degree of entire apple sorting working system.Furthermore,this technique is also applicable in other fruit production line with the need of fruit set separation,providing new exploration in the development of automatic fresh fruit industry.
Keywords:fruit set; vector control; permanent magnet synchronous motor; fresh fruit sorting
0 引言
我国是水果生产的大国,近年来水果的总产量已稳居世界首位.但是,水果的价值较低,且大多为本国消费,在国际市场上的贸易比重较低,其中很重要的原因是采摘后的商品化程度处理较为落后,外观包装质量差,在国际市场的竞争力较差.水果的产值大部分是由产后处理和加工创造出来的,分级是果品商品化处理的重要环节.苹果分选生产线需要对苹果的大小、品质、糖度、色泽等多方面进行筛选,最终完成商品化分级处理[1,2].
苹果分选生产线的自动化程度很高,但是在清洗消毒工序中分离苹果和保护网套仍然采用人工手动的方式,工作强度大且环境差,同时由于人工操作的原因,无法采用臭氧消毒这种较为先进的方式[3].为了摆脱人工劳动,设计果套自动分离机以解决人工劳动带来的问题,同时提升了分选生产线的自动化程度.
1 系统设计方案
果套自动分离机以控制系统为主,设计了特殊的机械结构配合控制系统共同完成工作[4].该装置的电动机选用永磁同步电机,控制系统主要为永磁同步电机的转速控制,通过矢量控制策略调节电动机的转速,同时配合特殊的机械结构设计使装置可以按照预期运行以达到果套分离的目的.果套分离机的装置图如图1所示.

图1 果套自动分离机整体结构示意图
图1中所示装置由电机带动上压齿组绕中轴转动,在上下压齿组接触时夹住苹果外保护套并将其撕裂,下压齿组在固定斜面的作用下沿中轴发生横移,上下压齿组交互错位,上压齿组继续做非匀速圆周运动,下压齿组经复位弹簧的作用回到原来位置.其中上压齿组所做非匀速圆周运动从初始水平位置开始加速,运行至最高点时开始减速,当其与下压齿接触时速度降至最低,之后再开始加速,周而复始.
2 永磁同步电机的控制策略
永磁同步电机作为电机运行时可以实施闭环或开环控制,实现转矩、位置、转速的伺服控制,为了实现果套分离机所要求的非匀速圆周运动,可使用永磁同步电机的闭环控制系统,同时为了提高电机的控制响应速度,这里采用了矢量控制策略[5-7].

图2 永磁同步电机矢量图
图2所示为永磁同步电机矢量图,以此为基础,在建立数学模型前,做如下假设[8-10]:
(1)忽略定、转子铁心磁阻,不计涡流和磁滞损耗;
(2)永磁材料的电导率为零,永磁体内部的磁导率与空气相同;
(3)转子上没有阻尼绕组;
(4)永磁体产生的励磁磁场和三相绕组产生的电枢反应磁场在气隙中均为正弦分布;
(5)稳态运行时,相绕组中感应电动势波形为正弦波.
则PMSM(永磁同步电机)在三相静止坐标系(ABC轴系)下的电压方程为:
uA=RSiA+pψA
uB=RSiB+pψB
uC=RSiC+pψC
(1)

ψA=LAiA+MABiB+MACiC+cosθeψf

(2)
式(2)中:Lxx为定子绕组自感系数,Mxx为定子绕组间的互感系数,ψf为转子磁链,θe为转子轴线与A相绕组轴线之间的电角度.那么电机转矩方程如下:
(3)
式(3)中:Te为电动机电磁转矩,np为电动机极对数.
由于上述公式是包含时变系数的微分方程组,在求解时比较困难,因此需要依据定子磁场建立新的坐标系.
建立一个与永磁同步电机转子同步旋转的dq坐标系(也称为两相旋转轴系),坐标系的d轴与电机转子磁极重合.则PMSM在此dq坐标系下的电压方程:
ud=Rsid+pψd-ωψq
uq=Rsiq+pψq+ωψd
(4)
式(4)中:ud、uq为定子电压矢量在dq轴系内的分量,id、iq为定子电流矢量在dq轴系内的分量,ω为转子角频率.相应的磁链方程在dq轴系内表示为:
ψd=Ldid+ψf
ψq=Lqiq
(5)
式(5)中:Ld、Lq为dq轴系的等效电感.电磁转矩方程在dq轴系内表示为:

(6)
永磁同步电机转子机械运动方程为:

(7)
式(7)中:Tl为电机轴上的负载转矩,J为电机轴上的转动惯量,B为阻尼系数.
从公式推导可以得出结论,由于永磁同步电机采用永磁体结构,因此其转子磁链幅值大小不变,电磁转矩只取决于dq轴系的电流,这简化了永磁同步电机的转矩控制.另一较为常用的坐标系为两相静止轴系(也称αβ轴系),它是矢量控制中不可缺少的一环.永磁同步电机在αβ轴系内的电压和磁链方程分别如下:
uα=Rsiα+Lαpiα-ωψfsinθe
uβ=Rsiβ+Lβpiβ+ωψfcosθe
(8)
(9)
电磁转矩在αβ轴系内表示为:
(10)
式(8)~(10)中:uα、uβ为定子电压矢量在αβ轴系内的分量,iα、iβ为定子电流矢量在αβ轴系内的分量,ψα、ψβ为定子磁链在αβ轴系内的分量.
电压、电流矢量可在各坐标轴系内相互变换,具体变换公式如下所示:
(11)
永磁同步电机的矢量控制根据性能和不同转速调节范围有不同的控制策略,这里采用直轴电枢电压为0控制,永磁同步电机定子电枢电流的直轴分量在控制过程中始终为0,即id=0矢量控制策略[11-14].
在永磁同步电机矢量控制中,按磁场定向的不同,可分为按转子磁场定向,按气隙磁场定向和按定子磁场定向.其中,由于按转子磁场定向的方式对电磁转矩等变量能获得更好的解耦,因此在实际工程中,应用的较为普遍.永磁同步电机电磁转矩在dq轴系内方程如下式:
(12)
(13)
由式(13)可以看出,电机电磁转矩只与np、ψf、iq有关,即控制iq就能控制Te、id=0控制时,磁阻转矩为零,无去磁效应.
3 控制系统的设计
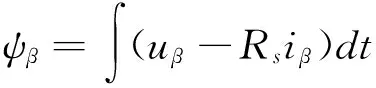
果套自动分离机控制系统的搭建包括硬件和软件,其中永磁同步电机矢量控制框图如图3所示.
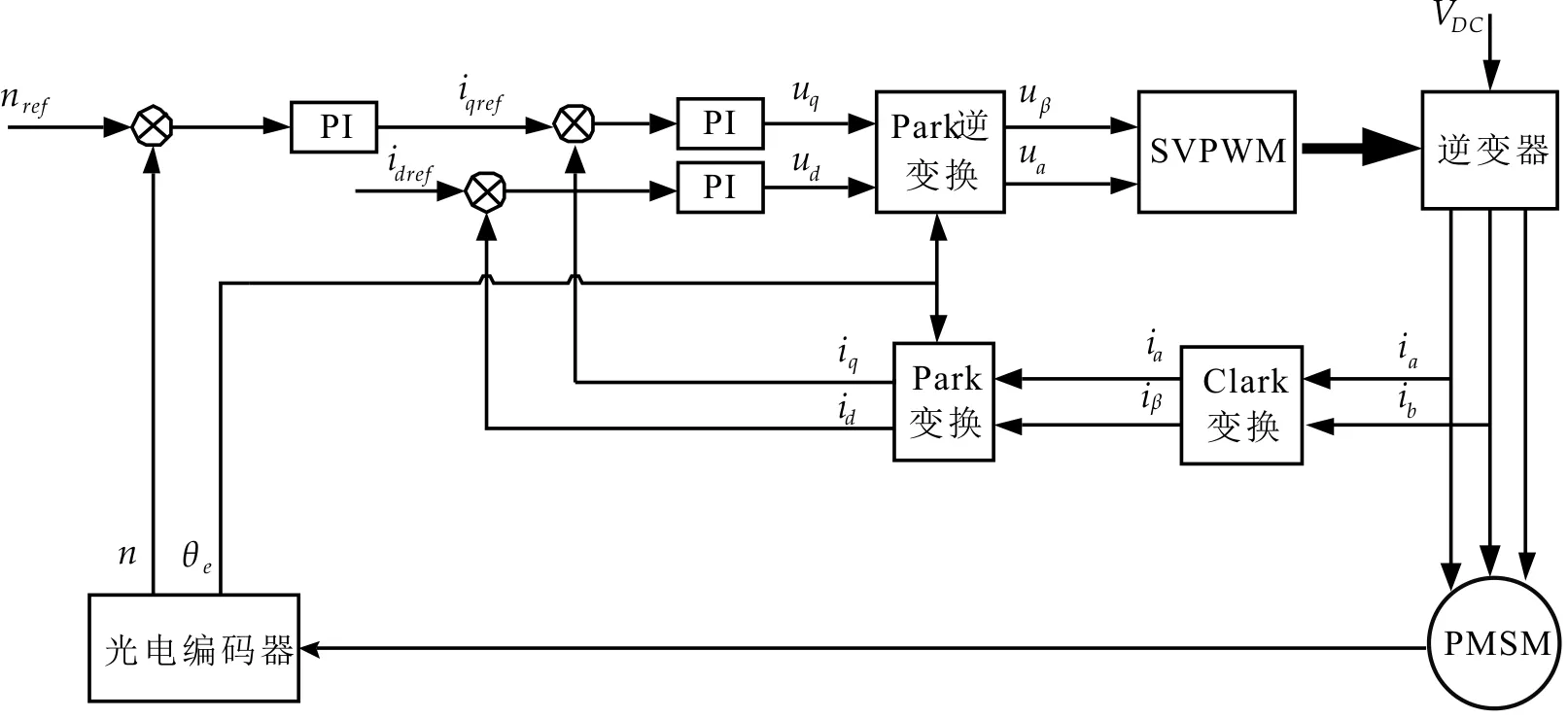
图3 永磁同步电机矢量控制框图
图3为矢量控制图,另外在电机控制系统中,主要用到的DSP资源包括A/D转换器、事件管理器和串行通信SCI.其中,A/D转换器的工作是采集霍尔电流传感器获得的电机相电流,以完成坐标变换.事件管理器是电机控制系统中最为核心的部分,其工作是实现电机控制算法,包括定时器中断、带死区的PWM波形的产生、捕获单元和QEP电路.串行通信SCI完成DSP控制器与上位机的通信,包括上位机对DSP控制器的指令控制及DSP控制器对上位机的信号反馈.系统的总体框图如图4所示.
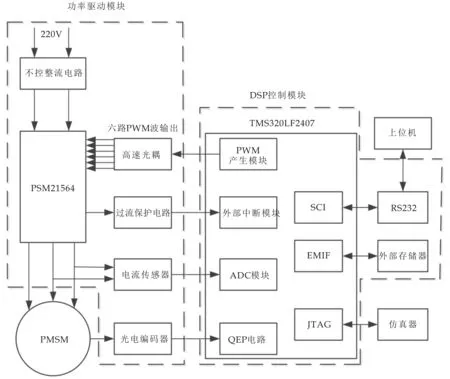
图4 果套分离机控制系统示意图
图4为系统总体控制示意图,主要包括功率驱动模块和DSP控制模块.系统的软件流程如图5所示,DSP上电后对系统的硬件进行初始化,包括DSP芯片外设器件的配置、IO引脚的配置等,系统软件初始化包括中断服务程序地址初始化和变量的初始化等.DSP完成初始化后就进入循环等待中断阶段,此时要是有中断事件发生,那么DSP就根据中断服务程序地址处理中断事件,完成后返回,继续等待中断事件的发生,如此循环下去.
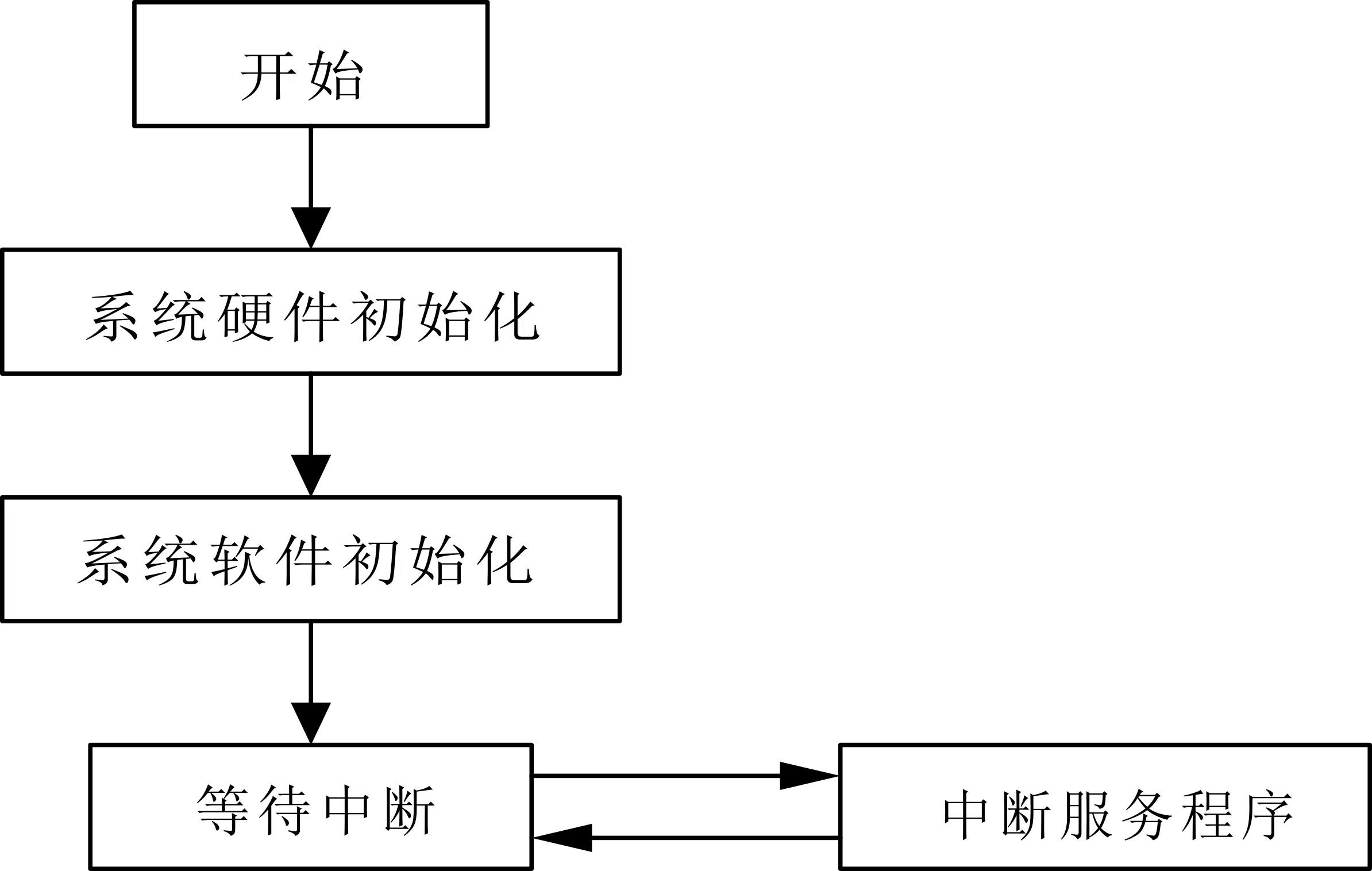
图5 系统软件流程图
图6所示为系统软件初始化流程图.系统中共有两个中断服务程序,分别为定时器中断服务程序和SCI接收中断服务程序.其中定时器中断服务程序完成电机控制算法,SCI接收中断服务程序完成上位机对DSP控制器的通信接收.
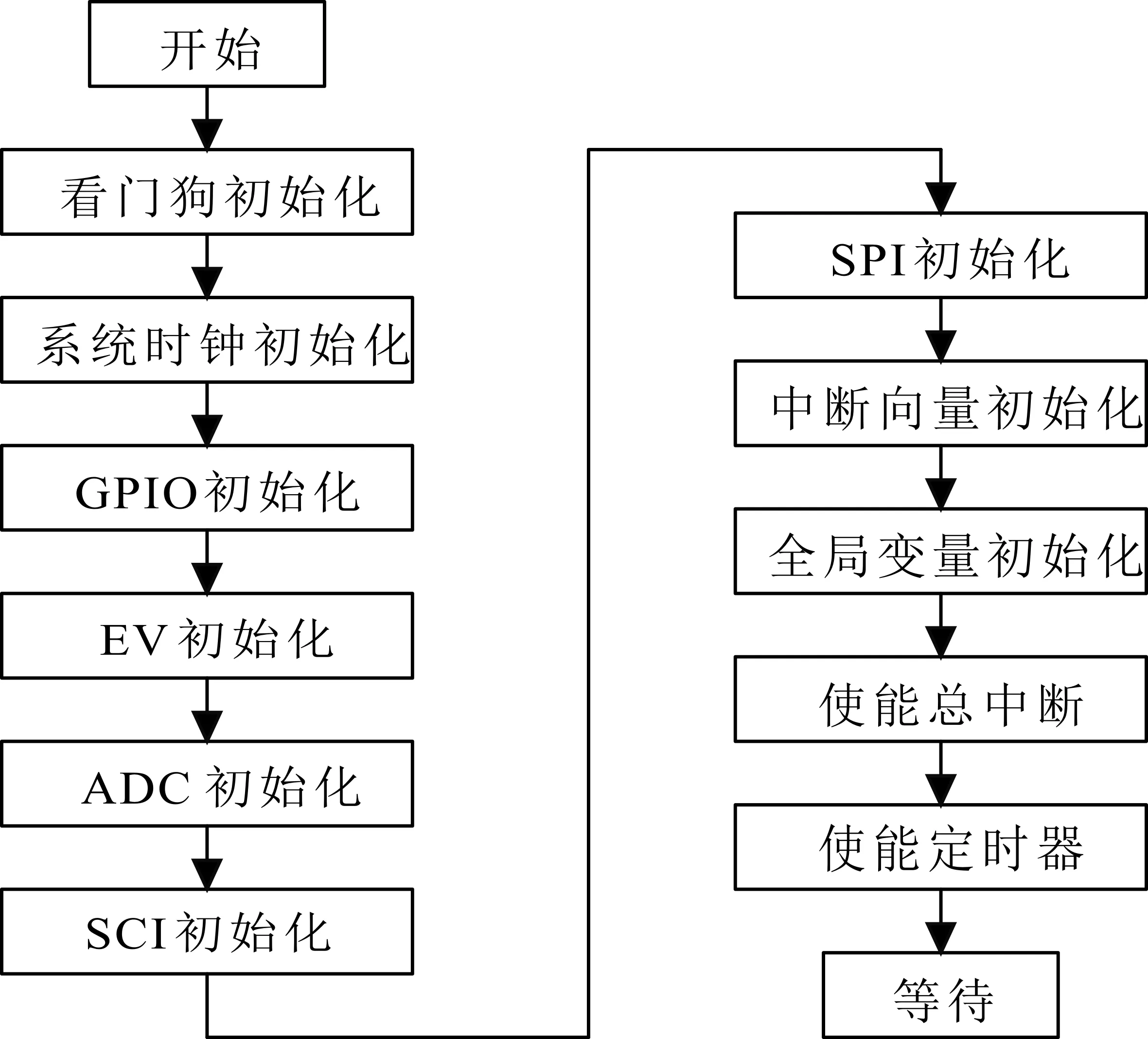
图6 系统软件初始化
定时器中断服务程序是负责实现电机控制算法,包括编码器位置检测程序、电流采样程序、Clark变换程序、三角函数查表程序、Park逆变换和SVPWM计算程序.此中断服务程序流程图如图7所示,由于本系统没有设计异步启动程序,因此,在电机启动时,是由光电编码器提供转子位置信息,当电机运行到一定转速后,再切换至无位置传感器运行.
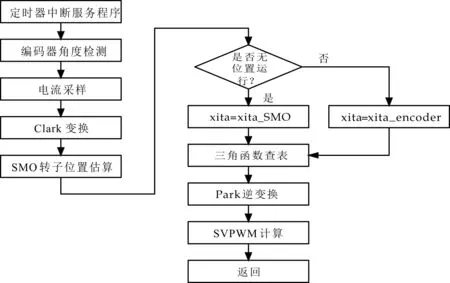
图7 定时器中断服务程序流程图
4 系统仿真及结论
通过上述对永磁同步电机矢量控制的分析和推导建立出数学模型,并以此搭建果套自动分离机控制系统的仿真流程图,如图8所示.
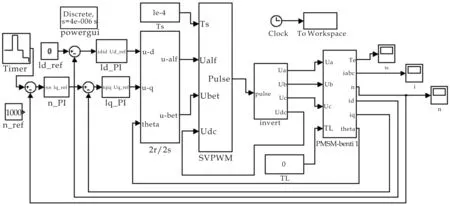
图8 果套自动分离机控制系统仿真图
依照图8所示的系统仿真图可以对果套自动分离机运行过程中电机的转速情况进行模拟.由于分离过程中要求上压齿组做非匀速圆周运动,所以在仿真时设定运行周期为2 s,0 s时速度为300 rad/s,0.6 s时速度为700 rad/s,1.0 s时速度为300 rad/s,1.4s时速度为100 rad/s,1.8 s时速度为0 rad/s.所得上压齿组速度曲线图如图9所示.
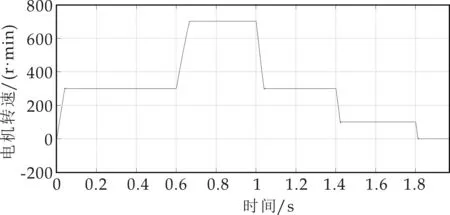
图9 果套自动分离机转速曲线图
同时还可以得出永磁同步电机在转速发生变动时的输出转矩波形,如图10所示.
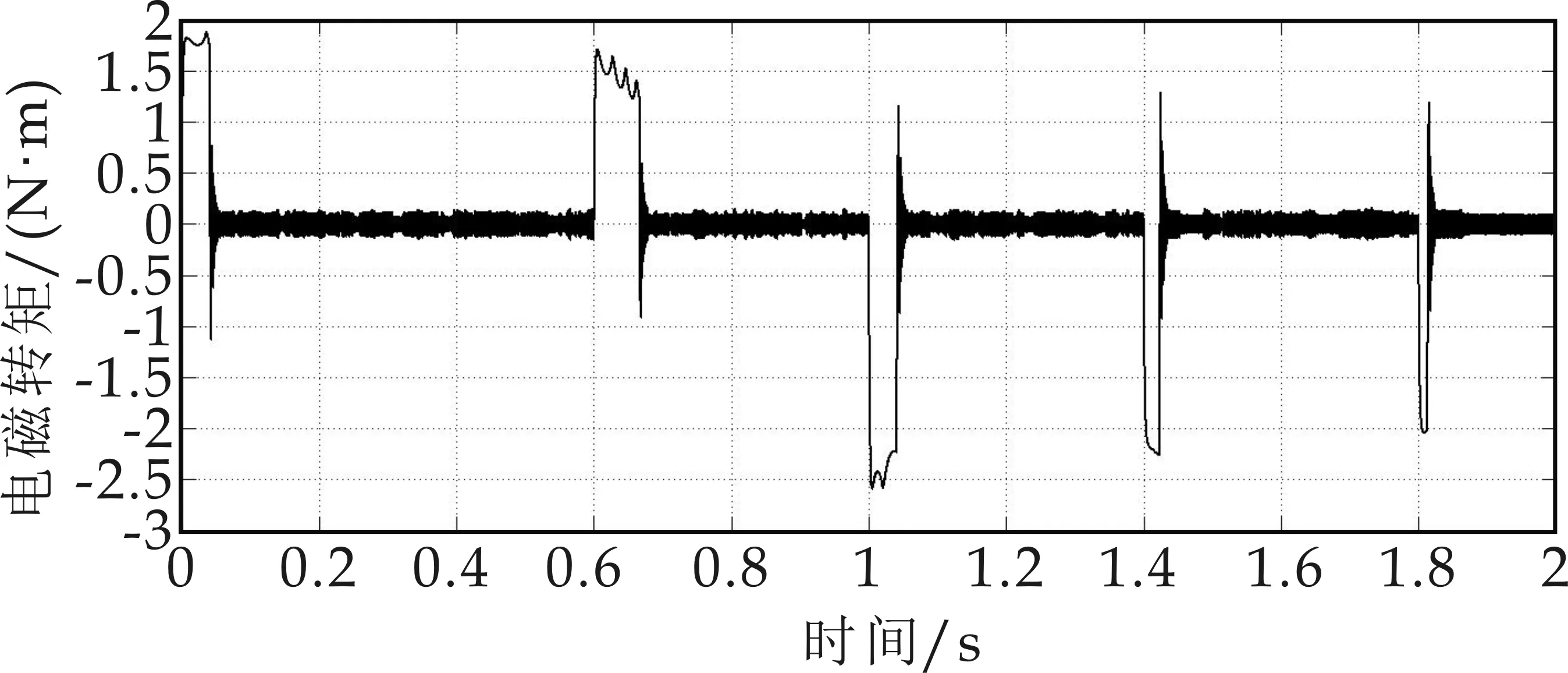
图10 电机输出转矩波形
在运行过程中当分离装置与苹果接触时,可视其为有负载的情况,则此时的输出转矩波形如图11所示.
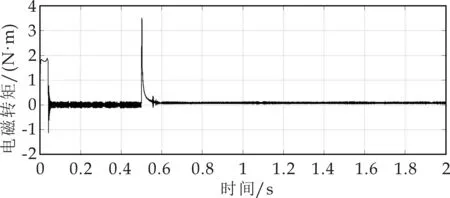
图11 负载时电机输出转矩波形
由图9和图10分析可知装置在运行过程中可以满足上压齿组所要求的速度变化,该速度曲线依照设定稳定运行,输出转矩波形变化也较为平滑,该系统可以如预期的稳定运行.此外由图11可以看出,在有扰动的情况下输出转矩的变化量不大,此时电机的转速依然在可控的范围内.同时果套自动分离机机械结构中的调速块会辅助配合控制部分,以达到对电机转速的控制.
[1] 张方明,应义斌.水果分级机器人关键技术的研究和发展[J].机器人技术与应用,2004,33(1):34-37.
[2] 中国农业年鉴编辑委员会.中国农业年鉴[M].北京:中国农业出版社,2014.
[3] 汪 闵,李 璐,陈艳秋.浅谈水果的全面品质管理[J].四川农业科技,2007,14(4):92-95.
[4] 魏新华,孙卫红.水果自动分选机分级卸料实时控制系统的设计[J].仪器仪表学报,2008,29(5):1 024-1 028.
[5] 庹朝永.基于单片机的直流电机PWM调速系统设计与开发[J].煤炭技术,2011,30(6):62-63.
[6] 李传海,曲继圣.空间矢量脉宽调制(SVPWM)技术特点及其优化方法[J].山东大学学报(工学版),2005,35(2):27-31.
[7] 赵 荣,罗耀华.采用SVPWM的永磁同步电机伺服系统建模仿真[J].应用科技,2008,35(10):49-52.
[8] 恒庆海,鲁 婧,李 丽.无刷直流电机鲁棒控制研究[C]//第三十二届中国控制会议论文集.西安:中国自动化学会控制理论专业委员会,2013:2 672-2 677.
[9] 何宝泉,刘 涛.基丁模糊PID算法的直流电机控制系统研究[J].科技咨询,2014,13(19):109-113.
[10] 贾 华,李俊彪,崔军辉.基于SVPWM的异步电动机变频调速系统的研宄[J].自动化与信息工程,2009,5(1):4-6.
[11] 陈敏俊,王 刚.基于空间矢量脉宽调制的新型永磁同步电机矢量控制调速系统[D].武汉:华中理工大学,2007.
[12] 郎宝华,刘卫国.空间矢量脉宽调制的仿真研究及应用.电机与控制应用[D].西安:西安交通大学,2007.
[13] 周 好.永磁同步电机矢量控制调速系统研究[D].大连:大连理工大学,2010.
[14] 解后循,高 翔.无刷直流电机参数自适应负载观测器设计[J].机械科学与技术,2011,30(2):237-241.
【责任编辑:陈佳】
Thevectorcontrolbasedonautomaticfruitsetseparationdevicecontrolsystemdesign
NING Duo, HAN Yu-hang
(College of Electrical and Information Engineering, Shaanxi University of Science & Technology, Xi′an 710021, China)
2017-08-14
陕西省科技厅科技统筹创新工程计划项目(2014KTCL02-17)
宁 铎(1955-),男,陕西礼泉人,教授,硕士生导师,研究方向:光伏太阳能、控制理论与控制工程
2096-398X(2017)05-0184-05
TM351
A
