结合运动矢量的分权快速压缩跟踪算法
2017-10-14罗会兰张文赛钟睿孔繁胜
罗会兰,张文赛,钟睿,孔繁胜
结合运动矢量的分权快速压缩跟踪算法
罗会兰1,张文赛1,钟睿1,孔繁胜2
(1. 江西理工大学信息工程学院,江西赣州,341000;2. 浙江大学计算机科学技术学院,浙江杭州,310027)
针对跟踪过程中目标移动过快产生跟踪漂移问题,提出一种结合超像素运动矢量的候选目标位置搜寻策略;在跟踪框架内分块提取特征并根据区域分配置信权值,弱化跟踪框架内边缘背景对分类结果的干扰,提高分类器分类鲁棒性;针对当目标出现严重遮挡时,分类器仍对正负样本特征进行学习而导致的学习不准确问题,提出增加目标遮挡检测机制,避免错误分类,有效解决目标遮挡问题。实验结果表明:提出的算法与当前先进目标跟踪算法相比,效果较好,克服目标快速移动、目标形变、复杂背景干扰、目标遮挡、光线变化等一系列挑战性的跟踪难点,实现目标长时间有效跟踪的同时,跟踪效率满足实时性的要求。
目标跟踪;运动矢量;置信值;遮挡检测
目标跟踪一直是机器视觉领域一个十分活跃的研究方向,在人机交互,视频监控,车辆行人跟踪等领域有着广泛的应用[1−2]。近年来,基于稀疏矩阵的压缩感知(简称CS)理论[3−4]表明:高维空间特征向量可以通过1个随机矩阵投射到低维空间,并保留原始图像特征空间的信息。ZHANG等[5]提出的为压缩跟踪算法(简称CT)采用满足有限等距(简称RIP)性质[6]的随机感知矩阵对多尺度图像特征进行降维,利用1个非常稀疏的矩阵,将采集到的目标和背景样本特征输入朴素贝叶斯分类器进行分类,输出分类分值最大的目标位置即为目标当前位置,并在线对采集到的正负样本进行分类进而更新分类器。该算法以其跟踪鲁棒性较高、运算速度快、能满足实际应用的特点广受关注。采用压缩感知理论思想实现目标跟踪的算法中,普遍存在跟踪漂移和对背景干扰敏感的问题。该类算法由于始终在前一帧目标位置的基础上开始搜索,当目标剧烈运动时,在跟踪过程中就会很容易出现跟踪漂移。Mean shift算法是一种通过不断迭代接近目标准确位置的算法,通过合理的目标预测,可以大大降低迭代次数,减少搜索过程中的计算量。王鲁平等[7]提出一种基于距离加权平均绝对差的模板漂移抑制算法,来抑制跟踪过程中的漂移现象,但在复杂环境下效果不稳定。田纲等[8]提出一种基于运动矢量分析模型的Mean Shift算法,针对跟踪框架内像素点的运动矢量进行概率统计分析,得到目标移动方向和移动速度的估值,在目标快速移动的过程中跟踪效果更加鲁棒,但像素点统计运算量较大。目标跟踪算法的分类器设计关系到目标与背景分开的最优边界,是跟踪算法是否能在跟踪过程中长时有效的关键。目前先进的跟踪算法中,分类器的设计也不尽相同。压缩跟踪(CT)[5]算法中,利用朴素贝叶斯分类器对候选目标区域采集到的特征压缩后的正负样本进行分类,但对于边缘相似度高的背景干扰容易出现错误分类。ZHANG等[9]提出的加权多实例学习(简称WMIL)算法中,根据提出的正负包概念,依据正包中正示例的重要程度分配权,在一定程度上提高了分类器的鲁棒性。ZHANG等[10]提出的实时在线特征选择(简称ODFS)实现自动选择区分度较高的特征,得到较为鲁棒的分类器。ZHANG等[11]提出的动态特征选择(简称AFS)动态选择分类能力较强的特征,可以实现在复杂背景下对目标和背景的区分。本文作者提出一种结合运动矢量判断目标位置的模型,针对跟踪过程中可能出现的跟踪漂移问题,对跟踪框架内图像进行超像素分割,对跟踪目标区域的超像素进行运动矢量编码统计分析,得到目标运动速度和方向的估值,修正候选目标的搜索位置,有效降低因跟踪目标移动剧烈或速度过快而导致的跟踪漂移问题。利用生物视觉系统的focus on attention理论对跟踪框架内分块提取特征并分配置信权值,可改善朴素贝叶斯分类器在复杂背景下的分类鲁棒性,降低跟踪框架内因相似背景的干扰而导致分类器错误分类的情况。增加目标检测机制,当目标存在严重遮挡时,停止学习正负样本,避免目标重新回到画面后跟踪丢失的问题。
1 结合运动矢量的分权快速压缩跟踪算法
本文提出一种结合运动矢量的分权快速压缩跟踪算法。在基于压缩感知理论的目标跟踪算法中,通过引入目标运动矢量模型,修正算法搜索中心,防止目标移动过快产生跟踪漂移;改进搜索策略;对跟踪框不同位置块的特征分配置信值,弱化背景干扰,改善朴素贝叶斯分类器分类的鲁棒性;提出一种新的正负样本更新机制,有效防止目标遮挡后的跟踪丢失问题。为方便描述,将本文提出的结合运动矢量的分权快速压缩跟踪算法命名为FCTMA。
1.1 结合运动矢量的快速搜索
ZHANG等[5]将压缩感知理论应用到目标跟踪中,提出一种基于压缩感知理论的压缩跟踪算法(CT)。该算法主要利用了1个×的随机矩阵提取多尺度目标的特征向量,其公式为
=(1)
随机矩阵的远远小于,满足有限等距RIP性质。如果是可压缩的(或者说是稀疏的),利用该性质可以通过最小化误差从中恢复,压缩程度取决于随机矩阵的稀疏程度。为降低目标特征计算复杂度,采用了1个非常稀疏的随机测量矩阵,定义 如下:

式中:=/4,矩阵的每一行只需要计算(小于4)个元素的值,计算复杂度()。利用该随机测量稀疏矩阵可以将1个高维图像空间(维)变换到1个低维空间(维)。
当采用该稀疏矩阵提取下一帧目标样本时,在当前帧目标位置,设置搜索半径,对搜索半径范围内所有像素点产生的跟踪矩形框逐个进行特征提取,并输入分类器进行分析比较。这一搜索策略使得算法在总的特征提取和计算时间上开销较大,不利于目标的实时跟踪。ZHANG等[12]针对提取样本特征的搜索策略进行改进,当+1帧图像到来时,根据第帧目标所在位置,对周围半径c范围内,间距步长c的像素点产生的矩形框进行样本特征提取并计算得到分数最大的点,大致确定目标位置t′。然后在t′周围设置更小搜索半径,通过以更小间距像素点产生的矩形跟踪框,进行样本特征提取并输入分类器,得分最大者即为目标的准确位置。本文也采用这种由粗到精的搜索策略,但这一改进的搜索策略虽然降低了搜索目标过程中的时间开销,提高了目标跟踪的实时性,但不能解决跟踪过程中的漂移问题。
跟踪过程中的漂移问题主要源于目标移动过快,而搜索目标范围仍然停留在上一帧图像中目标位置周围。要保证实时跟踪,搜索半径不宜过大,若增大搜索半径,一方面会增加算法复杂度,另一方面引入更多的冗余候选目标位置,增加背景干扰以及一些奇点,将对分类器的正确分类产生干扰。当目标真实位置不在搜索半径内时将导致跟踪漂移,严重的将导致跟踪失败。ACHANTA等[13]提出一种基于简单线性迭代聚类(简称SLIC)的超像素图像分割算法,利用LAB颜色空间和目标区域纹理特征对框定范围内的像素进行聚类,生成固定数量且具有适应边界、贴合性和紧凑性较好、大小一致且形状均匀的超像素。由于SLIC分割图像的方法,只需给定分割超像素的数,运行快速,只需要线性的存储空间和运行时间即可,因此,广泛应用于图像处理中代替像素点的运算。本文作者提出基于超像素的运动矢量来预测目标位置,修正跟踪目标候选区域,使得搜索初始位置更接近目标真实位置。首先,人为设定分割后超像素的个数,对跟踪框架内图像进行超像素分割,按照从左到右从上到下的顺序对超像素进行编号。然后建立超像素运动矢量模型并对其进行编码,如图1所示,运动矢量方向角范围为0~2π,划分为8个区间,其量化系数为π/4。
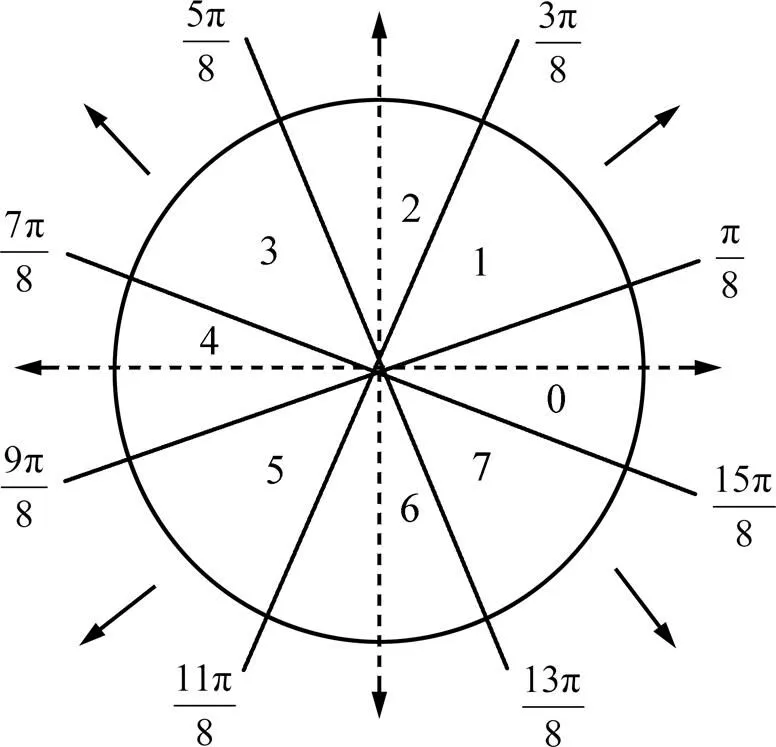
图1 运动矢量方向编码示意图

其中:C∈{0,1,2,3,4,5,6,7},为量化系数;。求得运动目标区域所有超像素运动矢量方向编码,得到目标区域运动矢量方向编码直方图。在得到目标区域运动矢量方向编码直方图,即运动方向统计信息的基础上,求得具有最大分布的方向编码区间,计算出具有最大分布的方向编码区间内所有超像素的平均运动矢量,其在轴和轴方向上的分量分别表示为,。目标运动速度和方向的估计值为
(4)
根据上一帧目标位置l和平均运动矢量,修正当前候选区域中心位置为

1.2 置信值分权
在提取样本压缩特征后,将其输入到朴素贝叶斯分类器,进行背景与目标的分类,得分最高的即为新一帧中目标位置。假设低维特征空间中各个元素是独立分布的,则朴素贝叶斯分类器模型为

其中:f为每一个样本的第个低维空间特征;,为二元变量,其值分别代表正、负样本标签。DIACONIS等[14]中证明高维随机向量的空间随机投影几乎都符合高斯分布,并且可用4个参数进行描述,如下式所示:
(7)
由于跟踪目标的形状通常是不规则的,跟踪窗口边缘处往往会夹杂大量背景,这时分类器对采集到的正负样本分类将产生干扰,影响到分类器的鲁棒性,若在错误的分类基础上对分类器进行更新,则必将影响跟踪过程的准确性。TORRALBA[15]将生物视觉focus of attention理论引入到目标检测中并取得了很好的效果。图2所示为生物视觉系统focus of attention。该理论表明高级动物的视觉系统会聚焦于一个确定的图像区域,离该区域越近的点,受到的关注度较高;反之,离聚焦区域越远的点,受到的关注度较低。受此启发,考虑到跟踪框架中心位置通常背景信息较少,置信度较高,相反边缘处含有相对较多的背景信息,置信度较低,本文在提取目标低维特征时,将跟踪框按照自上而下从左到右均分为×共块。然后将每一小块的灰度特征输入式(1),求得每小块的压缩特征,再输入到式(6)中的朴素贝叶斯分类器分类并计算得分,对跟踪框内靠近中心处块的特征得分赋予较大的置信权值,对跟踪框边缘块的特征得分赋予较小的置信权值,以弱化边缘复杂背景对分类器的干扰,其中第块的置信权值函数定义如下:

(=1,…,) (8)
式中:(l,l)为分割生成块的中心块位置坐标, (k,k)为第块的二维中心坐标。根据式(8),跟踪框架内中心位置赋予较大权值,表明其对特征提取得分的置信度较高,反之,边缘位置赋予较小的权值,表明其对特征提取的得分置信度较低。本文提出的置信值分权朴素贝叶斯分类器如下:
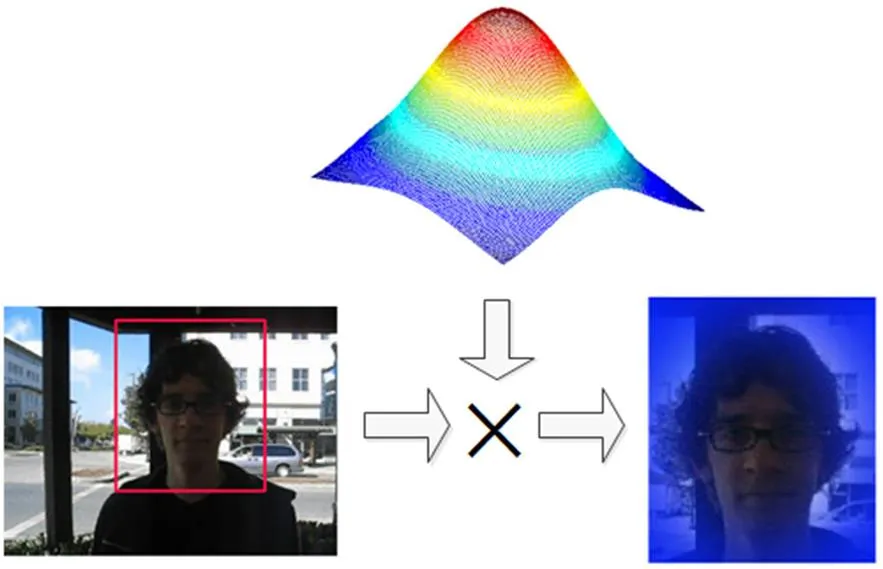
图2 生物视觉系统focus of attention
(9)
式中:f为跟踪框第块的第个低维空间特征,共有个特征。对跟踪框架内所有块的分类得分乘以各自对应的权值加权求和。得分最大的跟踪框即为目标位置。对式(9)中4个参数进行增量更新,以适应目标和背景的更新,更新公式为

(9)
式中:学习因子0<<1,其大小表示参数更新速度的快慢;和的定义分别为,,其中为正样本的个数,和分别为本帧正样本第块的第个特征向量的均值和标准差。
1.3 目标遮挡检测机制
由于缺少目标检测机制,在跟踪过程中目标出现严重遮挡时,如果仍然利用此时得到的正负样本进行分类器模型参数的实时更新,势必将错误的正负样本信息带到下一帧,极有可能导致目标跟踪失败。石武桢等[16]认为通过CT算法中朴素贝叶斯分类器()是否小于零判断跟踪目标是否出现严重遮挡。而当背景与目标相似度较高时极容易出现错误的判断,进而导致错误的正负样本学习和分类。鉴于此,本文提出一种新的目标检测机制,并将该机制看做一个二元分类问题,结合置信值分配权值以弱化背景干扰,当跟踪框架周围出现与跟踪目标高度相似的背景时,能将背景干扰降低到最小。利用改进后的分类响应函数()检测目标是否存在严重遮挡,当发生严重遮挡时停止样本模板更新。在此基础上结合运动矢量模型,在目标被遮挡的情况下,根据目标先前的运动矢量,预测目标的运动轨迹,在目标重新出现时,重新捕捉到目标,可以有效解决因目标遮挡而导致目标跟踪丢失的问题。
由于本文提出的分类器弱化背景干扰并不能完全消除背景干扰,所以,不能简单地认为分类器计分小于零即为目标出现严重遮挡。因此,本文通过大量实验对修正后的分类器()设置合适阈值,当检测的所有样本得分均低于()设定阈值时,即认定跟踪目标发生严重遮挡,此时不更新样本模板。假设所有待检测样本的分类器得分的最大值为

当max小于设定阈值时,停止样本更新。
1.4 FCTMA算法流程
本文提出的结合目标运动矢量的分权压缩跟踪算法流程图如图3所示。根据目标运动矢量,调整目标搜索位置,有效防止跟踪过程中跟踪漂移问题;提出一种置信值分权模型,根据特征在跟踪框架内的位置分配置信权值,减少因边缘背景的引入而导致错误分类的模型;改变目标样本更新机制,实现当目标被遮挡重新出现在画面中时快速重新定位目标位置,增强算法的鲁棒性。本文提出的FCTMA跟踪算法的具体步骤如下。
输入:当前第帧图像,目标候选区域0~,正样本目标位置范围0~pos,负样本位置半径范围minneg~maxneg,上一帧目标位置l−1。
1) 采用运动矢量模型,修正当前目标候选的位置,以修正后的候选位置pre为搜索中心点。
2) 以搜索中心点pre为中心,在半径范围内,进行步长c的搜索并生成跟踪框,采用式(2)中的稀疏矩阵提取每个小块的低维特征向量,输入分类器()计算正负样本分类得分,通过分类器最大响应值粗略定位目标位置l′。
3) 在粗跟踪定位的位置l′周围范围内,间隔步长生成矩形框,进行精确搜索,将每个跟踪框内的小块提取低维压缩特征输入分类器(),根据得分最大准确定位目标位置t。
4) 判断检测目标是否被遮挡。若存在遮挡,则停止正负样本更新;否则进行样本更新。在靠近当前帧目标位置t周围采集正样本,远离目标位置周围采集负样本,并通过稀疏矩阵降维,分别计算正负样本压缩特征和。
输出:本帧目标位置t。
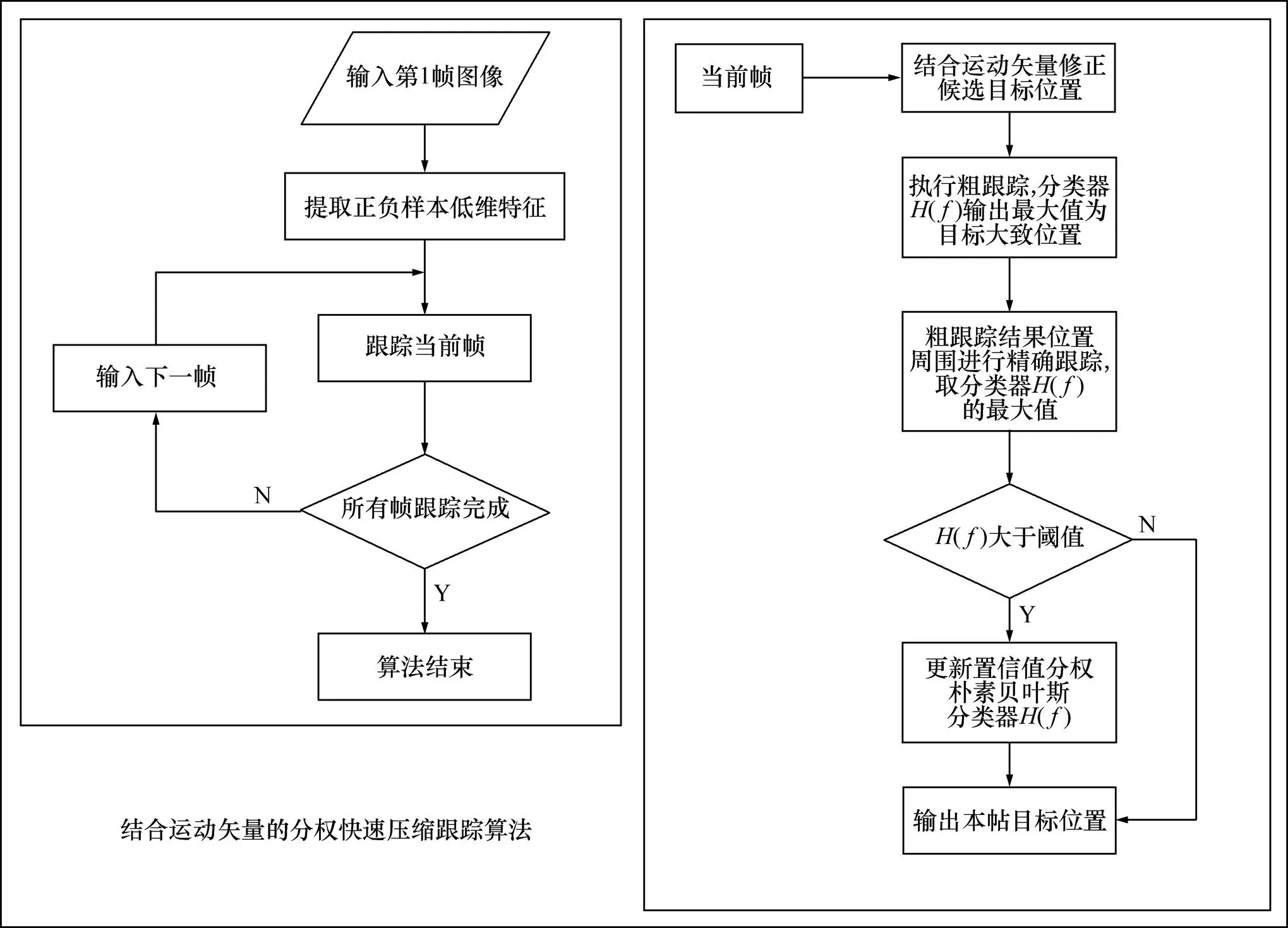
图3 FCTMA算法流程图
2 实验结果与分析
2.1 实验环境
(英特尔)Pentium(R) Dual-Core CPU E6500 @ 2.93 GHz,内存4G,显卡ATI Radeon HD 4350 (512MB)。操作系统为64位WINDOWS 7,仿真软件为MATLAB 2014a。选取7个视频数据进行测试(视频数据来自http://cmp.felk.cvut.cz/~vojirtom/dataset/ index.html),采用具有挑战性的7组图片序列,并对它们进行长时间跟踪,实验中使用的图像序列信息如表1所示。

表1 测试视频序列信息
2.2 参数设置
实验中,正样本范围pos=4表示在修正的候选目标周围4个像素范围内选取正样本,生成45个正样本;负样本范围minneg=8和maxneg=30,随机生成50个负样本。中心点修正因子=0.5,在粗跟踪中搜索目标范围c=25,搜索步长c=4;精确跟踪中搜索目标范围=10,搜索步长=1。的取值越大,跟踪框架内背景的干扰越小,但是会大幅增加算法运算时间开销,因此,不能取值过大,本文取=5,即跟踪框架内分成25个小块。由于不能完全克服跟踪框架内的相似度较高的背景干扰,若将max阈值设置为零,则在背景与目标相似度较大时分类器会出现误判断max,通过实验设置阈值设定为−10。参与对比的算法代码均来自于相应作者个人网站,相应算法参数也均采用作者代码中设置的参数值。
2.3 效果对比
将本文提出的结合运动矢量的分权快速压缩跟踪算法FCTMA分别与当下3种主流目标跟踪算法:快速压缩跟踪(FCT)[12]、分权多示例学习(WMIL)[9]、实时在线特征选择(ODFS)[10]和动态特征选择(AFS)[11]的跟踪结果绘制于每组序列图片的同一帧中,在animal,skating1,skating2,pedestrian3,girl_mov,bird2和david序列集上的部分跟踪效果对比如图4所示。
图4(a)animal序列中,跟踪难点主要在于目标快速移动,FCT算法在第6,7和8共3帧出现跟踪漂移,未能很好地定位跟踪目标,WMIL和ODFS在跟踪过程中也多次出现跟踪漂移的现象,AFS则未能实现目标跟踪,本文提出的FCTMA算法全程均未出现跟踪漂移现象,这表明本文提出的结合运动矢量模型对预测快速移动的目标运动轨迹具有良好的预判性,可以有效地解决因目标移动过快而产生的跟踪漂移现象。图4(b)所示的skating1序列中,跟踪难点主要在于目标自身形变和复杂的背景灯光变换,AFS,ODFS和WMIL共3种算法相继在第6,48和80帧出现目标跟踪丢失,FCT也在第309帧出现跟踪失败,本文提出的FCTMA算法实现全程无漂移目标跟踪,这说明本文提出的算法对因跟踪目标自身形变和背景复杂、灯源干扰具有良好的鲁棒性;图4(c)所示的skating2序列中,跟踪难点主要包括目标快速旋转和形变以及背景干扰和遮挡等,第82帧中,目标自身形变并有大量背景干扰,本文提出的FCTMA对跟踪目标的跟踪效果最佳,说明本文提出的置信值分权分类器对跟踪框架内的背景有良好的抗干扰性。第119帧中,目标被完全遮挡,只有FCTMA算法仍然能够很好的定位到目标位置实现跟踪,说明本文提出的当目标被遮挡时停止正负样本更新机制对跟踪过程中出现的目标遮挡情况具有很好的鲁棒性。第212帧中,目标快速旋转,FCTMA算法仍然能准确地跟踪到目标,586帧中,目标快速移动,只有本文算法FCTMA未出现跟踪漂移的现象,再次证明了本文提出的运动矢量模型对快速移动目标的跟踪漂移现象具有良好的修复作用。图4(d)所示的pedestrian3序列是一组接近日常生活的目标跟踪序列,主要跟踪困难在于背景中有与跟踪目标颜色相近的物体干扰。前期跟踪过程中,本文提出的FCTMA算法和其他4种算法效果接近,105帧过后,只有本文算法FCTMA没有受到背景的干扰,实现全程准确跟踪,其他4种算法均被背景干扰而导致跟踪失败,说明本文提出的对跟踪框架内的置信值分权对因背景过于相似而导致的跟踪丢失问题具有良好的鲁棒性。图4(e)所示的girl_mov序列中,跟踪难点是目标遮挡问题,由于本文加入了目标检测机制,在120帧和395帧目标被遮挡,此时没有正样本,本文提出的算法FCTMA停止正负样本的学习,避免分类器错误的分类,从而在目标遮挡后再次出现时能重新找到跟踪目标。其他4种算法均未能找回跟踪目标,导致后续跟踪过程漂移和跟踪失败,再次证明本文提出的对目标出现遮挡后停止正负样本的学习机制对跟踪过程中目标出现严重的遮挡有着良好的适应性。图4(f)所示的bird2序列中,跟踪目标形状不规则,跟踪窗口内包含大量背景,由于本文算法FCTMA对跟踪框架范围内目标进行置信值分权,从而避免跟踪框架内周围大量背景干扰,而FCT算法则出现严重漂移和丢失目标的情况,本文提出的FCTMA和其他3种算法跟踪准确。图4(g)所示的david序列中,跟踪人脸的过程中,存在的挑战有背景光线的变化和跟踪框架的边缘背景干扰。ODFS算法跟踪失败,其余4种算法中,本文提出的FCTMA算法跟踪效果最理想,如图4(g)中david序列第391,431和449帧所示。

(a) animal;(b) skating1;(c) skating2;(d) pedestrian3;(e) bird2;(f) david
2.4 跟踪准确率比较
为衡量算法的跟踪准确性,借鉴文献[17]中做法,采取跟踪成功率这一评价指标来衡量跟踪的准确率。首先,计算每一帧跟踪目标位置与真实目标位置的重合率:

式中:T为目标跟踪算法求得的目标位置的矩形跟踪框;G为真实的目标所在位置的矩形跟踪框;为面积运算。重合率的大小表明跟踪目标的准确度高低。若重合率小于9%则认为该帧跟踪失败,否则认为算法跟踪成功。最后将算法跟踪成功的帧数除以相应序列集总的帧数得出各算法的跟踪成功率。将本文提出的FCTMA算法与4种主流跟踪先进算法在7个挑战性视频序列上的跟踪成功率进行统计,结果如表2所示。

表2 跟踪成功率(取整)比较
注:黑体代表该组序列集上的最大值;下划线代表该组序列集上的次大值。下同。
表2所示的实验结果中,本文提出的FCTMA算法在其中6个序列集上的跟踪效果最佳,且在全部7个序列集上的平均跟踪成功率比次好的跟踪算法WMIL高近22%。特别在跟踪难度较大的skating1, skating2和girl_mov 3个序列集上都获得了最大成功率,且比次好的跟踪算法成功率分别高23%,22%和17%。在相对简单的跟踪序列集bird2和david上的跟踪准确率达到99%和100%。
2.5 跟踪时间效率
为了验证本文提出的FCTMA算法是否满足跟踪实时性要求,将本文FCTMA算法与主流跟踪算法进行跟踪效率比较。本文提出的结合运动矢量的分权快速压缩跟踪算法FCTMA与快速压缩跟踪(FCT)[12]、分权多示例学习(WMIL)[9]、实时在线特征选择(ODFS)[10]和动态特征选择(AFS)[11],在animal,skating1,skating2,pedestrian3,girl_mov,bird2和david 序列集上的平均每帧跟踪时间对比如表3所示。实验结果表明:本文提出的FCTMA算法在全部7个序列集中的4个序列上效率排在第2,但仍可以达到跟踪实时性的要求。

表3 各算法运行时间表
2.6 实验分析
从上面实验对比结果分析中,不难看出本文提出的FCTMA算法在面对跟踪过程的各种挑战中,与当前先进的跟踪算法相比,效果较好,准确率较高。在animal和skating2 2组序列中,目标快速剧烈移动,由于本文算法FCTMA加入运动矢量修正搜索位置,跟踪全程抑制跟踪漂移效果最佳。skating1,skating2和pedestrian3 3组序列集中,跟踪过程伴随各种背景干扰,本文提出的FCTMA算法,由于对分类器进行置信值分权,弱化跟踪过程中的背景干扰,大大提升了跟踪的效果和准确性。在skating1,skating2和girl_mov 3组序列集中,跟踪目标出现严重遮挡,由于本文加入目标遮挡检测,在检测到遮挡后停止分类器继续学习,当目标遮挡后重新出现时均能成功重新找回跟踪目标,并在跟踪难度较大的skating1中实现跟踪成功率100%,在girl_mov序列集上目标遮挡过后的第120帧,只有本文算法重新找回跟踪目标。
3 结论
1) 提出的FCTMA算法基于CT跟踪算法框架,通过加入目标运动矢量模型,修正目标候选区域位置,有效抑制了跟踪漂移问题;通过对跟踪框架分配置信值,对跟踪框架内中心处分配较大置信值,周围分配较小置信值,弱化边缘复杂背景的干扰并降低计算时间复杂度;修改正负样本更新机制,通过引入目标检测机制,提高算法对于出现目标遮挡时的跟踪鲁棒性,在目标出现遮挡时,防止分类器错误分类。
2) 通过实验对比,在目标快速剧烈移动,目标快速旋转,复杂背景光照变换、相似背景物干扰,目标遮挡等一系列目标跟踪挑战中,表现出较好的跟踪效果,具有较高的鲁棒性和稳定性。
[1] JALAL A S, SINGH V. The State-of-the-art in Visual Object Tracking[J]. Informatica (slovenia), 2012, 36(3): 227−248.
[2] 黄诚, 刘华平, 左小五, 等. 基于Kinect的人机协作[J].中南大学学报(自然科学版), 2013, 44(S1): 386−393. HUANG Cheng, LIU Huaping, ZUO Xiaowu, et al. Human-robot cooperation using Kinect[J]. Journal of Central South University (Science and Technology), 2013, 44(S1): 386−393.
[3] CANDES E J, TAO T. Decoding by linear programming[J]. IEEE Transactions on Information Theory, 2005, 51(12): 4203−4215.
[4] CANDES E J, TAO T. Near-optimal signal recovery from random projections: universal encoding strategies[J]. IEEE Transactions on Information Theory, 2006, 52(12): 5406−5425.
[5] ZHANG K, ZHANG L, YANG M H. Real-time compressive tracking[M]//Berlin Heidelberg: Springer, 2012: 864−877.
[6] Emmanuel J Candes. The restricted isometry property and its implications for compressed sensing[J]. Comptes Rendus Mathematique, 2008, 346(9): 589−592.
[7] 王鲁平, 马峰, 韩建涛. 基于距离加权平均绝对差的模板漂移抑制算法[J]. 中南大学学报(自然科学版), 2012, 43(10): 3894−3899. WANG Luping, MA Feng, HAN Jiantao.A mean shift object tracking algorithm based on covariance estimation[J]. Journal of Central South University (Science and Technology), 2012, 43(10): 3894−3899.
[8] 田纲, 胡瑞敏, 王中元. 一种基于运动矢量分析的Mean shift目标跟踪算法[J]. 中国图象图形学报, 2010, 15(1): 85−90. TIAN Gang, HU Ruimin, WANG Zhongyuan. A mean shift target tracking algorithm based on motion vector analysis[J]. Journal of Image and Graphics, 2010, 15(1): 85−90.
[9] ZHANG Kaihua, SONG Huihui. Real-time visual tracking via online weighted multiple instance learning[J]. Pattern Recognition, 2013, 46(1): 397−411.
[10] ZHANG Kaihua, ZHANG Lei, YANG M. Real-time object tracking via online discriminative feature selection[J]. IEEE Transactions on Image Processing, 2013, 22(12): 4664−4677.
[11] ZHANG L, ZHANG K, YANG M, et al. Robust object tracking via active feature selection[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2013, 23(11): 1957−1967.
[12] ZHANG Kaihua, ZHANG Lei, YANG M. Fast compressive tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2013, 36(10): 2002−2015.
[13] ACHANTA R, SHAJI A, SMITH K, et al. SLIC Superpixels[EB/OL]. [2010−06]. http://ivrlwww.epfl.ch/supple- mentary_material/RK_SLICSuperpixels/index.html
[14] DIACONIS P, FREEDMAN D. Asymptotics of graphical projection pursuit[J]. The Annals of Statistics, 1984, 12(3): 793−815.
[15] TORRALBA A. Contextual priming for object detection[J]. International Journal of Computer Vision, 2003, 53(2): 169−191.
[16] 石武祯, 宁纪锋, 颜永丰. 压缩感知跟踪中的特征选择与目标模型更新[J]. 中国图象图形学报, 2014, 19(6): 932−939. SHI Wuzhen, NING Jifeng, YAN Yongfeng. Feature selection and target model updating in compressive tracking[J]. Journal of Image and Graphics, 2014, 19(6): 932−939.
[17] CEHOVIN L, KRISTAN M, LEONARDIS A. An adaptive coupled-layer visual model for robust visual tracking[C]//2011 IEEE International Conference on Computer Vision (ICCV). Barcelona: IEEE, 2011: 1363−1370.
(编辑 陈爱华)
Fast compressive tracking algorithm based on motion vector and assigning weight value
LUO Huilan1, ZHANG Wensai1, ZHONG Rui1, KONG Fansheng2
(1. School of Information Engineering, Jiangxi University of Science and Technology, Ganzhou 341000, China;2. College of Computer Science and Technology, Zhejiang University, Hangzhou 310027, China)
To reduce the drift phenomenon in object tracking, a candidate object location search method was proposed combining motion vector with super pixel. In order to weaken the influence of complex background and improve the tracking robustness, the features from the blocks in the tracking box were assigned different weights according to their locations. The classifier may get wrong information if it continues learning when the tracking object is largely occluded. A object detection approach was proposed to avoid the false classification in the situations of object occlusion. The experiment results show that the proposed algorithm has better performance and can track successfully and efficiently for a long time, compared with some state-of-the-art works in many complicated situations, e.g. swift movement, object deformation, complex background, occlusion and illumination variation.
object tracking; motion vector; confidence value; occlusion detection
10.11817/j.issn.1672−7207.2017.02.018
TP391.4
A
1672−7207(2017)02−0395−09
2016−03−05;
2016−06−27
国家自然科学基金资助项目(61462035);江西省青年科学家培养项目(20153BCB23010)(Project(61462035) supported by the National Natural Science Foundation of China; Project(20153BCB23010) supported by Young Scientist Training Project of Jiangxi Province)
罗会兰,博士,教授,从事机器学习、模式识别研究;E-mail:luohuilan@sina.com
