异步电动机直接转矩控制的建模和仿真
2017-10-13易学良聂楚辉邱自华
易学良,聂楚辉,邱自华,何 焱
(湖南理工学院 计算机学院,湖南 岳阳 414006)
异步电动机直接转矩控制的建模和仿真
易学良,聂楚辉,邱自华,何 焱
(湖南理工学院 计算机学院,湖南 岳阳 414006)
对异步电动机直接转矩控制进行了建模与仿真研究.首先推导了异步电动机数学模型,简要阐述了异步电动机矢量控制的工作原理,重点阐述了其在MATLAB/Simulink中的建模过程.然后对仿真结果进行了比较分析,仿真结果表明异步电动机直接转矩控制在改变负载转矩和转矩滞环容差时,电机系统具有较好的动态特性.
异步电动机; 直接转矩; 负载转矩; 转矩滞环容差; 建模和仿真
Abstract: The direct torque control of asynchronous motor is modeled and simulated.First of all,the mathematical model of asynchronous motor is deduced,and the working principle of vector control of asynchronous motor is briefly expounded.The modeling process of MATLAB/Simulink is emphasized.Finally,the simulation results are compared and analyzed.The simulation results show that the asynchronous motor for direct torque control system has better dynamic characteristics when changing the load torque and torque hysteresis tolerance.
Key words: asynchronous motor,direct torque,load torque,torque lag,modeling and simulation
0 引言
异步电动机是将电能转换为机械能,转子绕组在感应电流和气隙旋转磁场相互作用过程中产生电磁转矩,最终达到能量转换效应.异步电动机转子不需要与其它电源连接,由电力系统产生感应电流.可以根据其转子的结构简单分为鼠笼式电机和绕组电机两大类.我们所熟知的感应电机,其转子的绕组电流是感应产生的[1,2].直接转矩控制系统是跟随矢量控制系统的另一种高动态性能交流驱动控制系统.特点是固定二相坐标系中定子磁通的幅值保持不变,实现了转矩反馈控制.核心问题是转矩和定子磁链反馈模型,以及如何根据转矩和磁链控制信号选择电压空间矢量控制器的开关状态.定子磁链的直接转矩控制采用磁场方向,只要能够观察定子电阻,直接转矩控制就可以大大降低矢量控制技术对控制性能和参数时变的影响.使用定子坐标系分析,不需要求解交流电机的数学模型来解决问题,保存了电机的转换和计算复矢量旋转变化,但是,缺点是输出转矩脉动,在低速运行时,限制了电机系统的调速范围[3,4].本文详细阐述了异步电动机直接转矩控制在MATLAB/Simulink中的建模和仿真过程,可以为其实际应用提供一些借鉴.
1 异步电动机的数学模型
想要实现电机的高动态性能,就要充分研究电机的工作原理和数学模型.由于电机的电压和电流是在固定坐标系下测量的,所以在静态坐标系中描述电机模型是很方便的.通过坐标转换得到三相异步电动机在三相静态坐标系中的电压方程.定子电压矢量通常在α-β坐标系表示[5]:

其中usa、usb、usc分别为静态坐标系下的电压,且

其中usα、usβ分别为α-β坐标系下的电压.
异步电动机的动态特性可以通过以下方程来描述:

电机矢量形式的数学模型可以描述如下:

其中Rs,Rr表示异步电动机的定子和转子的电阻;Ls、Lr表示定子和转子的自感,Lm表示两者的互感[9];ωr表示电动机的电角度.
由上面的公式进而可得

电机的电磁转矩可以用定子磁通和转子磁通的形式表示:

上式中的“×”表示矢量积.此外,电磁转矩也可以由定子磁通和定子电流表示.坐标系中的电磁转矩方程为

2 异步电动机直接转矩控制的工作原理
异步电动机直接转矩控制工作原理如图1所示[6].其工作过程为: 首先通过转速测量传感器得到异步电动机实际转速n,与参考转速n*进行比较后,进入速度比较器得到转矩给定值.把霍尔传感器得到的异步电动机定子电流ia、ib和ic以及电压值ua、ub和uc,同时输入到异步电动机的转矩和磁链测算器可以得到定子磁链的模|ψs|以及转矩实际值Te,实际转矩Te与参考转矩经转矩调节器运算后得到转矩开关信号TT.磁链参考值与磁链计算值|ψS|经磁链调节器运算后得到磁链开关信号ψT.与此同时,定子磁链幅值分量ψsa和ψsb通过区间判断磁链位置信号ST.最后将转矩开关信号TT、磁链开关信号ψT和磁链位置信号ST三个信号输入到区间开关选择表进行比较分析,从而可以得到精确的电压开关信号Sa、Sb和Sc来驱动三相异步电动机的工作.

图1 三相异步电动机直接转矩控制系统的结构框图
3 建模及仿真结果分析
3.1 仿真模型的建立
根据两相坐标系下的异步电动机的数学模型可以得到异步电动机模块,在MATLAB/Simulink中搭建仿真模块.uα、uβ两个分量代表模块的定子电压输入,两个分量代表模型的定子电流输出、电磁转矩Te和转速,其仿真模块框图如图2所示[7,8].

图2 异步电动机仿真模块框图
与矢量控制一样,直接转矩控制方式也有两个子系统,速度控制和磁链控制.速度控制器产生一个转矩指令,得到电磁转矩,与实际的转矩信号进行比较,产生三相输出的转矩滞后比较器状态.磁通控制器产生磁通指令,通过比较后,由定子磁通模拟模型获得的实际磁链信号,得到磁通磁滞比较器的两个状态输出,进而得到定子磁链模型.通过磁通量仿真模型获得的定子磁链方向信号输入到扇区比较器,得到不同的扇区符号.磁通量、转矩滞后比较器和扇区比较器同时输出到开关状态控制器,以确定变频器的开关状态,实现直接转矩控制.在熟悉MATLAB/Simulink仿真软件的基本模块及其用法的基础上,可以对前面提出的直接转矩控制原理、定子磁链滞环控制器、转矩滞环控制器、开关表进行仿真建模.异步电动机直接转矩控制系统仿真模型如图3所示.

图3 异步电动机直接转矩控制系统仿真模型
3.2 仿真结果及分析
为了更好地分析异步电动机直接转矩控制的性能,本文研究改变负载转矩和改变转矩滞环容差时电机系统两种情况的工作状态.首先是改变负载转矩,负载转矩在0.2秒的时候由20突变到40.根据图2和图3建立的异步电动机直接转矩控制系统的仿真模型,得到的仿真结果如图4所示.从图4的仿真波形可以看出,在电机刚开始起动时段内,PI在调节器的作用下,电机起动时电流、转矩和转速仿真波形迅速增加,电机系统迅速达到稳态.在0.2s时增加负载转矩时,转矩瞬间突变,三相电流振幅变大,转速波动,但很快再次达到平衡.在0.5s后,电机运行状态达到新的稳定状态,说明异步电动机直接转矩控制系统动态特性比较好,缺点就是转矩脉动有点大.

图4 改变负载转矩时,电机系统的仿真波形
图5和图6分别为转矩滞环容差从3变为1时的电机系统仿真波形.从图5和图6可以看出,降低转矩滞后容差,三相电流、转矩和转速波动较小,但是通过改变转矩滞环容差,电机转矩波动减小,这对电机系统来说是优点,另外改变转矩滞环容差,不影响系统的动态性能.
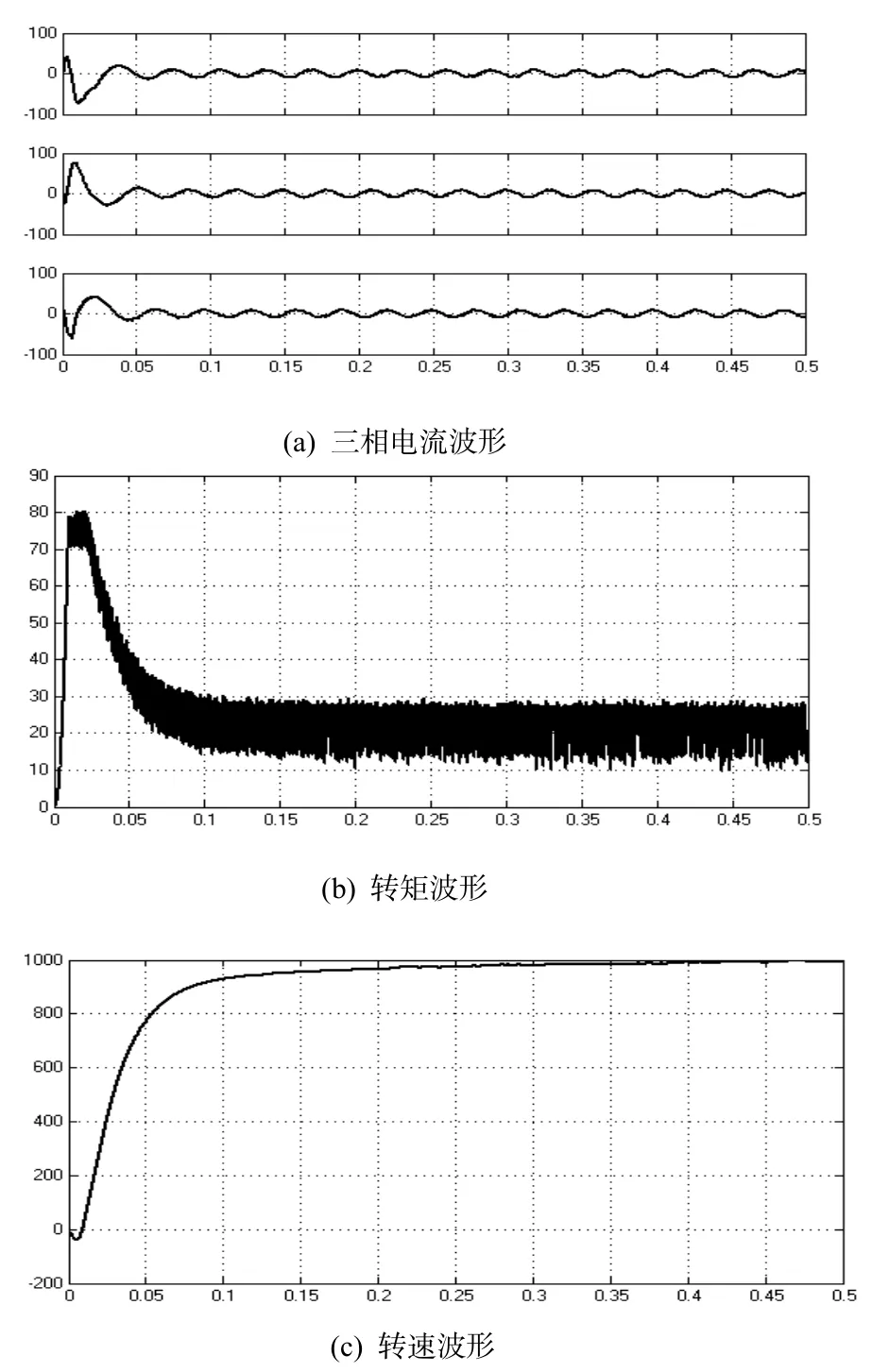
图5 转矩滞环容差为3时,电机系统的仿真波形

图6 转矩滞环容差为1时,电机系统的仿真波形
4 结论
本文依据异步电动机数学模型的研究以及直接转矩控制的工作矢量的研究,在MATLAB/Simulink中建立异步电动机直接转矩控制系统的仿真模型,通过改变负载转矩脉动以及转矩滞环容差研究电机系统的定子三相电流、转矩以及转速仿真波形,研究直接转矩控制的电机性能.通过仿真结果可知,异步电动机直接转矩控制在负载转矩改变时,具有较好的动态特性,另外改变转矩滞环容差时,不影响电机系统动态特性,而且当转矩滞环容差变小的时候,转矩脉动减小.
[1]刘衍富,王毓顺,徐为勇,等.基于电流模型的异步电机双闭环控制系统仿真[J].工作控制计算机,2012(1): 108~109
[2]张永广.离心机用异步电动机直接转矩控制系统[D].大连: 大连海事大学硕士学位论文,2009
[3]李 夙.异步电动机直接转矩控制[M].北京: 机械工业出版社,1999
[4]周艳青,尹华杰,罗永吉.基于MARS的无速度传感器的矢量控制系统改进与仿真研究[J].防爆电机,2008,43(140): 28~31
[5]顾亭亭.基于MATLAB的异步电动机仿真系统[J].科学与财富,2012(9): 40~42
[6]阳同光.感应电机直接转矩控制系统定子磁链观测及速度辨识研究[D].长沙: 中南大学硕士学位论文,2008
[7]张永刚.基于DSP的异步电机的直接转矩控制的研究与开发[D].长沙: 中南大学硕士学位论文,2002
[8]洪乃刚.电力电子、电机控制系统的建模和仿真[M].北京: 机械工业出版社,2010
Modeling and Simulation of Direct Torque Control for Asynchronous Motor
YI Xueliang,NIE Chuhui,QIU Zihua,HE Yan
(College of Computer Science,Hunan Institute of Science and Technology,Yueyang 414006,China)
TM46
A
1672-5298(2017)03-0033-05
2017-06-21
湖南省教育厅一般项目(17C0715)
易学良(1978− ),男,湖南岳阳人,硕士,湖南理工学院计算机学院讲师.主要研究方向: 计算机仿真、模式识别及数字图像处理
