风浪流中半潜式风机系统动力响应特性研究
2017-10-11张新曙尤云祥
毛 莹,范 菊, 2,张新曙, 2,尤云祥, 2
(1. 上海交通大学 海洋工程国家重点实验室,上海 200240; 2. 高新船舶与深海开发装备协同创新中心,上海 200240)
风浪流中半潜式风机系统动力响应特性研究
毛 莹1,范 菊1, 2,张新曙1, 2,尤云祥1, 2
(1. 上海交通大学 海洋工程国家重点实验室,上海 200240; 2. 高新船舶与深海开发装备协同创新中心,上海 200240)
以三浮筒(Tri-floater)型半潜式风机系统为对象,采用时域方法,考虑垂荡板的黏性阻尼效应,研究系泊缆直径、长度、预张力和布置方式等参数对其在风浪流中动力响应特性的影响规律,提出了一种系泊参数优化方法。在此基础上,根据东海和南海三个不同水深区域百年一遇海洋环境条件,通过调整Tri-floater型浮式基础的吃水和垂荡板等参数,有效地提高了其运动响应周期,减小了其运动响应幅值。同时,根据风机浮式基础运动幅值的设计规范要求,针对三个不同水深区域特点,设计了Tri-floater型浮式基础的系泊系统。计算结果表明,改进后的Tri-floater型半潜式风机系统能满足百年一遇极端环境下的作业要求,适合于东海和南海海洋环境下海上风能资源的开发。
半潜式风机;时域计算;运动响应;系泊张力
Abstract: By taking the effects of viscous damping into account, a time domain analysis is proposed for analyzing the effect of the mooring system parameters on the dynamic responses of the Tri-floater semi-submersible offshore wind turbine in wind, wave and current, and then an optimization scheme is presented for the mooring line diameter, length, pre-tension and arrangement. Meanwhile, based on once-in-a-century met ocean data in the East and South China Seas, a modification scheme is presented for the draft and heave plate diameter of the original Tri-floater wind turbine so that the motion periods are significantly increased, and the response performances are effectively improved for such a modified Tri-floater wind turbine. Moreover, based on the design standard for the floating wind turbine system, a design scheme is presented for the mooring system of such a modified Tri-floater wind turbine according to three different water depth conditions in the East and South China Seas. Results show that the modified Tri-floater wind turbine can meet the operation demand under once-in-a-century extreme conditions, and hence suitable for the exploitation of offshore wind resources in the East and South China Seas.
Keywords: semi-submersible wind turbine; time-domain simulation; motion response; mooring tension
海洋风能是一种洁净、储量极为丰富的可再生资源,已日益成为新能源中最具发展前景的发电方式之一[1]。我国近海可开发利用的风力资源大约为7.5亿千瓦,约为陆上风能的3倍,远海风能储量则更为丰富,因此海洋风能资源将是我国重要的新能源之一[2]。在海洋风能开发中,风机支撑基础的选择非常重要,对于水深小于50 m的海域,固定式基础被认为是一种最佳的风机支撑基础。当水深大于50 m后,固定式基础的安装、维护难度会随之增加,而且费用急剧增大,在这种情况下新型浮式支撑基础应运而生,包括半潜式、Spar式、TLP式和混合式等[3]。
半潜式支撑基础的吃水比较小,具有良好的稳性,运输和安装便利,费用相对节省,属于海上浮式风机支撑基础的首选结构形式之一。三浮筒(Tri-floater)组合形式是目前主要的半潜式风机的浮式基础形式,其中风机塔柱一般安装于三角形浮筒的中心位置处[4]。研究表明,该种三浮筒组合形式为海上半潜式风机的最优方案之一[5]。其后,Roddier等[6-8]设计了WindFloat型半潜式风力机,与Tri-floater型形式最大不同之处是其风机塔柱安装于三个柱体其中之一上,整个风机系统采用压载水循环系统来满足稳性要求,在三个柱体底部还安装了阻尼板。研究表明,阻尼板可以减小浮式基础的垂荡响应,但阻尼板形状对附加阻尼的大小影响较大[9]。
Takeshi等[10-11]提出了载有三个风力机的大型半潜浮式平台,并将浮式基础作为柔性体建立了系统动力学方程,研究表明风载荷与浮体运动间存在较大的耦合作用,而且浮式基础的弹性变形对其运动响应影响较大。 曹菡等[12]针对120 m水深环境,提出了一种Tri-floater型浮式基础主尺度和重量参数方案,研究了其完整稳性和频域运动响应特性。吴海涛等[13]研究了风机载荷对WindFloat型浮式风机系统运动响应特性的影响。
以Tri-floater型半潜式风机系统为对象,利用商业软件SESAM建立其在风浪流中动力响应特性的数值分析方法,重点研究系泊系统参数对浮式基础运动响应及其系泊张力特性的影响,提出对系泊系统参数进行优化设计的方法。在此基础上,根据东海和南海不同水深区域百年一遇海洋环境条件,对Tri-floater型浮式基础的主尺度参数进行改进,并设计了相关的系泊系统,对改进后的Tri-floater型浮式基础的运动响应及其系泊张力特性进行了数值计算分析。
1 数值方法
半潜式风机系统主要由发电机组系统、支撑系统和定位系统等组成。发电机组系统包括发电机组、轮毂和叶片等,支撑系统包括上部的塔柱及其下部的浮式基础,定位系统采用悬链线系泊定位方式,其中浮式基础由立柱、垂荡板、撑杆等组成。在风、浪、流联合作用下, 系统的运动学方程可以表示为

根据线性波浪谱理论,海面波浪运动可以看作由很多简谐波组成的平稳随机过程,对每一个谐波成分,采用线性绕射理论计算浮式基础的一阶波浪力。由一阶波浪力的计算结果,采用远场积分方法,计算二阶波浪力。利用在频域内得到的一阶和二阶波浪力,采用快速逆傅里叶变换,计算相应的一阶和二阶脉冲响应函数。然后,对给定时间历程的波浪升高进行卷积积分,即可得到一阶和二阶波浪力的时间历程[14]。
采用线性辐射理论计算附加质量和阻尼系数。根据频域内阻尼系数的计算结果,采用快速傅立叶逆变换,计算延迟函数。静水恢复力矩阵C可由常规的静力分析计算。浮式基础的垂荡板为整个系统的运动提供很大的黏性阻尼,会有效地抑制系统的共振运动。根据文献[15]的实验研究结果,垂荡板的等效阻尼可取为临界阻尼的10%,其中临界阻尼矩阵定义为

浮式基础的流载荷根据Morison公式计算。系泊力根据悬链线理论,采用准静态方法计算。风载荷包括风对风机系统静水面以上部分的作用力以及风机运行时产生的风机推力,前者可由下式进行计算[16]:
其中,n为受风构件数量,i为受风构件序号,Ch为受风构件高度系数,Cs为受风构件形状系数,Ai为风向角为α时第i个受风构件在风向上的投影面积,V为风和结构物的相对速度。
风机推力分操作和极端两种工况进行计算[16]。在操作工况下,风机推力可由下式计算
其中,ρa为空气密度,CFB的取值依据为最大能量输出时的贝兹动量理论(Betz momentum theory),A为叶片扫掠面积,U为风速。
在极端工况下,风机推力可由下式计算
其中,CD1和CD2分别为风轮和塔架的风阻力系数,Umax为极限风速,Aw为风机风轮的迎风面积,H为风机轮毂高度,fh是高度h处的塔柱截面直径。
在对运动方程求解之前,首先对风机系统进行频域水动力分析,获得附加质量和阻尼系数,确定延迟函数。在此基础上,基于Newmark 动态时间积分方法数值求解方程(1),每个时间步中的内外力平衡迭代采用 Newton Raphson法。在每个时间步,将风机系统地运动及其系泊动力响应作为结果输出,并作为下一个时刻的输入进行下一个时刻的计算。
2 结果与分析
以Tri-floater型半潜式风机系统为对象,研究其在风浪流中的动力响应特性,如图1所示。该系统支撑杆连接三根平衡立柱,构成稳定的等边三角形式的浮体基础,每根平衡立柱下端安装一个垂荡板,风机塔柱位于三角形浮体中心位置处[4]。建立如图1所示的直角坐标系,坐标原点o位于系统重心,oxy平面平行于静水面,oz轴垂直向上为正。该浮式风机系统原型的设计水深为50 m,主要参数如表1所示。

图1 Tri-floater型风机系统及其坐标系Fig. 1 Tri-floater configuration and coordinate system

参数数值参数数值立柱中心距/m68风机额定功率/MW5立柱直径/m8桨叶直径/m115立柱高度/m24桨叶数3立柱吃水/m12风机固定位置(距静水面)/m83垂荡板直径/m18塔柱长度/m65浮体整体质量/t2479浮体垂向重心高度(距平台底部)/m27.6浮体惯性半径/m(40,40,29)浮体垂向浮心高度(距平台底部)/m5.3
2.1数值方法验证
首先对没有系泊时该风机系统的浮式基础在周期波浪中的响应特性进行计算分析。其中,波浪周期为3.14~62.8 s,波高为2 m;考虑到对称性,来波方向选为0°、30°、60°和90°。结果表明,浮式基础的纵摇RAOs最大值出现在浪向角0°的情况,横摇RAOs最大值出现在浪向角90°的情况,而垂荡RAOs最大值随浪向角的变化较小。在表2中,给出了本文与文献[4]计算结果的比较,文献[4]的计算没有考虑垂荡板的阻尼,本文在验证部分的计算去除了垂荡板阻尼效应。由表可看出,本文的计算结果与文献[4]的结果符合,相对误差在合理范围内。

表2 Tri-floater型浮式基础响应计算结果与文献[4]计算结果的比较Tab. 2 Comparison of motion responses of tension Tri-floater with results in the reference[4]

图2 系泊缆布置(6根) Fig. 2 Mooring arrangement(6 lines)
下面对系泊状态下浮式基础在风浪流中的响应特性进行计算分析。其中,海况数据来源于荷兰Meetpost Noordwijk K13海域,浮式基础通过3组悬链线系泊缆进行定位,每组系泊缆之间按照120°的角度进行分布,环境数据及系泊参数如表3和表4所示[4],系泊方式如图2所示。
在表5中,给出了本文和文献[4]计算结果的比较,其中工况1、工况2和工况3分别为最大工作工况、极端工况和破损工况。破损工况是指在极端海况下一根锚链断裂的状况,其中x向破损系泊缆为3号系泊缆,y向破损系泊缆为1号系泊缆。由表可知,本文计算结果与文献结果一致,各工况下系泊缆张力值均在其容许范围内,即该浮式风机系统适合于Meetpost Noordwijk K13海域的海况。

表3 Meetpost Noordwijk K13海域的海况数据Tab. 3 Environmental condition of Meetpost Noordwijk K13

表4 系泊参数Tab. 4 Properties of the mooring system

表5 系泊缆张力计算结果与文献[4]计算结果的比较Tab. 5 Comparison of tension with results in the reference[4]
2.2系泊参数的影响
系泊系统是影响浮式风机系统运动响应的关键性因素之一。这里考察系泊缆预张力、直径、长度和布置形式等对浮式基础运动响应及系泊系统动力响应的影响规律。其中,风浪流参数如表3所示,风浪流方向均取为0°。
1) 系泊预张力的影响:系泊布置形式如图2所示,钢缆长度和直径分别为225 m和160 mm,锚链长度和直径分别为225 m和150 mm,计算结果如图3所示。结果表明,当预张力T0从300 kN增大到500 kN时,浮式基础纵荡运动的极大值和平均值明显地减小,而其标准差则略有减小,系泊缆锚链顶端张力的极大值和平均值略有增大,而其标准差则变化很小;当预张力T0从500 kN增大到1 000 kN时,浮式基础纵荡运动的极大值和平均值略有减小,而标准差则变化较小,系泊缆锚链顶端张力的极大值和平均值明显增大,而其标准差则略有增大。

图3 系泊预张力对浮式基础纵荡运动及锚链顶端张力的影响Tab. 3 Effect of the pretension of mooring lines on surge and top tension
2) 系泊直径的影响:系泊布置形式如图2所示,钢缆和锚链长度均为225 m,预张力为300 kN,计算结果如图4所示。结果表明,当钢缆直径D从160 mm减小到146.5 mm,而锚链直径d从150 mm减小到137 mm时,浮式基础纵荡运动的极大值略有增大,系泊缆锚链顶端张力的极大值则略有减小,而纵荡运动和锚链顶端张力的平均值和标准差变化很小。

图4 系泊直径对浮式基础纵荡运动及锚链顶端张力的影响Tab. 4 Effect of the diameter of mooring lines on surge and top tension
3) 系泊长度的影响:系泊布置形式如图2所示,钢缆直径为160 mm,锚链直径为150 mm,预张力300 kN,计算结果如图5所示。结果表明,当钢缆长度L及锚链长度l均从225 m减小到175 m时,浮式基础纵荡运动的极大值和平均值略有减小,而其标准差则变化很小,系泊缆锚链顶端张力的极大值略有增大,而其平均值和标准差则变化很小。

图5 系泊长度对浮式基础纵荡运动及锚链顶端张力的影响Tab. 5 Effect of the length of mooring lines on surge and top tension
4) 系泊布置形式的影响:将系泊从6根增加到9根,钢缆长度和直径分别为225 m和160 mm,锚链长度和直径分别为225 m和150 mm,预张力300 kN,系泊布置形式如图6所示,计算结果如表6所示。结果表明,当系泊从6根增加到9根后,锚链顶端张力明显减小,而浮式基础纵荡运动幅值略有减小。

图6 系泊缆布置(9根)Fig. 6 Mooring arrangement(9 lines)

系泊数系泊缆极大值平均值标准差6根锚链顶端张力/kN4248.71771.83549.48平台纵荡运动/m5.582.911.0449根锚链顶端张力/kN3741.37622.15401.33平台纵荡运动/m5.072.540.96
另外系泊缆分段方式对浮式风机系统动力响应特性也会产生影响。钢缆长度仍为225 m,而将锚链改为两段,长度分别为25 m和200 m,钢缆和锚链直径分别为160 mm和150 mm,预张力300 kN,系泊布置形式如图2所示,计算结果如表7所示。结果表明,系泊缆分段方式对浮式基础纵荡及其系泊系统动力响应的影响很大,对于三段式系泊缆,锚链端最大张力明显变小,但浮式基础纵荡运动的极大值却明显增大。

表7 系泊缆分段方式对浮式基础纵荡运动及锚链顶端张力影响Tab. 7 Effect of segmented form of mooring lines on surge and top tension
对于半潜式风机系统,目前并没有明确的规范对其系泊系统性能作出规定。由于风机在正常作业及自存情况下不必考虑由于平台运动位移过大而造成设备损坏的情况,故其水平位移限制一般要求额定工况下为水深的2%~5%,自存工况下为水深的8%~15%[17];对于风机电力系统来说,叶片俯仰运动对发电功率影响较大, Zambrano等[18]指出,在正常作业状态下,浮式风电系统平均俯仰角应小于5°,最大俯仰角应小于15°。浮式风机平台系泊系统中系泊张力的安全因子规定如下[16]:作业工况下最大锚泊张力安全因子取为2.7;自存工况下最大锚泊张力的安全因子取为1.8。对于破损状态下的系泊系统,作业工况下最大锚泊张力安全因子取为1.8,自存工况下最大锚泊张力安全因子取为1.25。
根据前面对系泊参数影响规律的分析结果,结合规范要求,对Tri-floater型半潜式风机系统的原系泊系统进行改进,提出一种相对成本更低的悬链线式系泊设计方案,其中仍然采用6根系泊缆对称布置的方式,但缩短锚链长度,减小其直径,同时增加钢缆长度,但减小其直径,具体参数如表8所示,计算结果如表9所示。

表8 优化后的系泊参数Tab. 8 Properties of the mooring system after optimization

表9 优化系泊参数后Tri-floater系统动力响应特性计算
由表9可知,在最大作业工况下,两个方向下浮式基础纵(横)荡、纵(横)摇及垂荡运动最大幅值均满足相关规范要求,系泊缆张力安全系数均大于规范要求的2.7。在极端工况下,两个方向的浮式基础的纵(横)荡最大偏移值均在±7.5 m之内,纵(横)摇幅值也在±15°范围内,系泊缆张力安全系数均大于规范要求的1.8。同时,在破损工况下,系泊缆张力的安全系数均大于1.25。由此可见,在保持系泊缆总长不变的情况下,增加钢缆长度,减小锚链长度,并采用更细的系泊缆,同样能使浮式风机系统的运动及其系泊动力响应达到设计要求,同时还能减小系泊缆重量和相应的成本。
2.3海洋环境参数的影响
我国东海和南海风电资源丰富,半潜式风机系统是首先风电资源开发装置之一,但东海和南海海洋环境与Meetpost Noordwijk海域的海洋环境有很大差异,Tri-floater系统能否适用于东海和南海将是需要研究的关键之一。表10第一列为东海某100 m水深海域的百年一遇风浪流数据,而第二和第三列为南海某189.5 m及340 m水深海域的百年一遇风浪流数据。
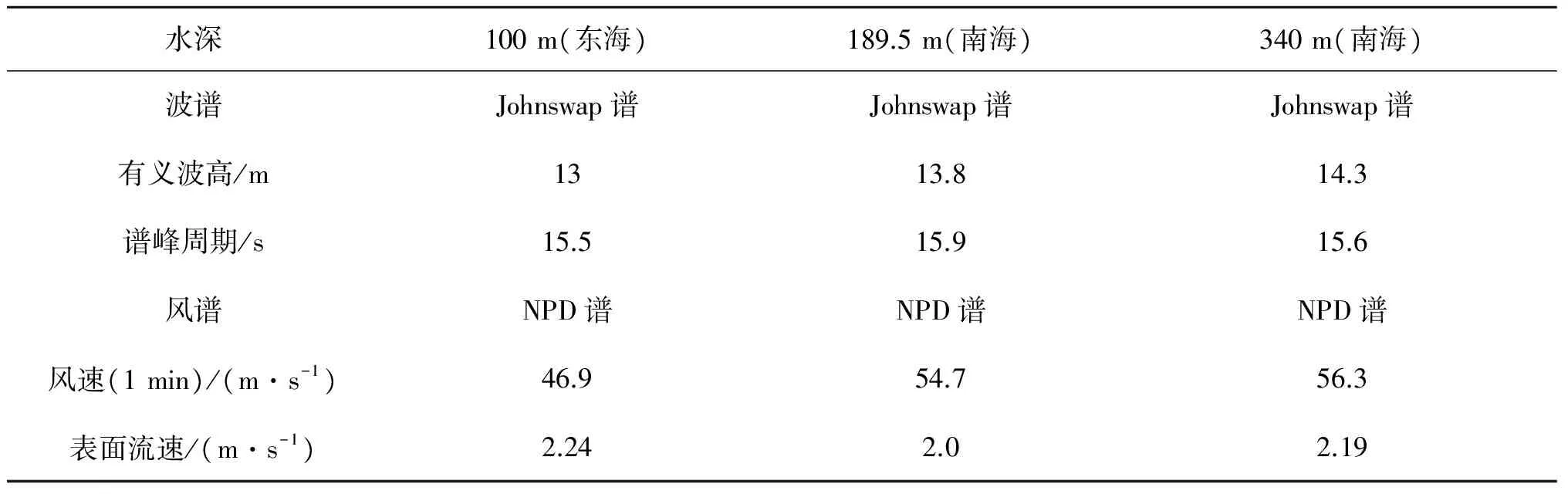
表10 东海和南海某海域百年一遇海洋环境条件Tab. 10 Environmental condition of the East and South China Seas
由表10可知,三个海域百年一遇波浪的谱峰周期均在15~16 s之间,而由表12可知,Tri-floater系统在100 m、189.5 m和340 m三个海域水深下的垂荡固有周期为17 s左右,与该三个海域百年一遇波浪的谱峰周期接近。因此,不可避免地会出现垂荡共振现象,进而影响浮式风机系统的安全性。如何有效地提高Tri-floater浮式基础的垂荡固有周期,使其远离波浪的谱峰周期,将是Tri-floater系统能否适用于东海和南海需要解决的关键问题之一。为此,本文对Tri-floater的浮式基础参数提出一种改进方案,将其吃水从12 m增至14 m,同时将垂荡板直径从18 m增至24 m,此时Tri-floater浮式基础的浮力有所增加,重心有所下降,如表11所示。

表11 Tri-floater原型浮式基础主要参数的改进Tab. 11 Parameters of Tri-floater after modification
首先对改进前后Tri-floater型浮式基础在周期波浪中的响应特性进行计算分析,结果如表12和13所示。其中,波浪周期为3.14~62.8 s,波高为2 m,来波方向选为0°、30°、60°和90°。结果表明,改进Tri-floater型浮式基础后,其垂荡、纵摇和横摇运动周期明显增大,纵(横)摇周期从25.12 s增加至34 s,而垂荡周期从17 s增加至22 s附近,已避开东海和南海百年一遇波浪谱峰周期,而且垂荡、纵摇和横摇响应RAOs均有所减小。
水深和海洋环境发生变化后,系泊系统的合理设计是Tri-floater系统能否适用于东海和南海的另一个需要解决关键问题。根据表10中所列的东海和南海三种水深下的海况条件,依据API等规范,Tri-floater系统的系泊进行设计。根据Tri-floater型浮式基础的对称性,仍然采用将系泊缆固定在三根立柱底部的方法,考虑到东海和南海百年一遇海洋环境较为恶劣,采用如图6所示的9根锚链的布置方式。依照API规范,结合劳维奇方法等,根据不同水深设计系泊缆长度。依照DNV锚链设计规范,选取系泊缆直径、破断强度等参数。表14为东海和南海3种不同水深下系泊设计参数。

表12 Tri-floater型浮式基础在不同水深下的响应Tab. 12 Response of Tri-floater in different water depths

表13 改进后Tri-floater型浮式基础在不同水深下的响应Tab. 13 Response of Tri-floater after modification

表14 三种不同水深下改进后Tri-floater系统的系泊缆参数Tab. 14 Properties of the mooring system after modification in different water depths
对改进后Tri-floater系统在系泊状态下的响应特性进行计算分析,结果如表15-17所示。其中,风浪流参数如表10所示,x向(0°)破损系泊缆为3号系泊缆,y向(90°)破损系泊缆为1号系泊缆。结果表明,在三个不同海域海洋环境条件下,完整极端工况的系泊缆张力安全系数均大于1.8,在某一根系泊缆破损工况下余下系泊缆的张力安全系数均大于1.25;三个不同海域的极端工况下,浮式基础纵(横)荡运动最大偏移量均在各自水深的8%以内,纵(横)摇运动最大摇摆角均在±15°之间,垂荡运动最大幅值分别为3.75 m、3.58 m、3.69 m,均满足规范所要求;在某一根系泊缆破损工况下,对三个不同海域海洋环境条件,浮式基础纵(横)荡运动最大偏移量均控制在各自水深的10%左右,纵(横)摇运动最大摇摆角在±15°间,垂荡运动最大幅值与完整工况下相比变化较小,均能达到系泊规范要求。由此可见,在改进Tri-floater的浮式基础参数,根据相关规范设计其系泊系统后,该半潜式风机系统可以适用于东海和南海海上风能资源的开发利用。

表15 东海海域100 m水深下改进后Tri-floater系统的动力响应特性Tab. 15 Statistic characteristics of Tri-floater after modification in 100 m water depth

表16 南海海域189.5 m水深下改进后Tri-floater系统的动力响应特性Tab. 16 Statistic characteristics of Tri-floater after modification in 189.5 m water depth

表17 南海海域340 m水深下改进后Tri-floater系统的动力响应特性Tab. 17 Statistic characteristics of Tri-floater after modification in 340 m water depth
3 结 语
采用时域分析方法,考虑垂荡板阻尼效应,在极端和破损等工况下,对系泊Tri-floater型浮式基础在风浪流中的运动响应及其系泊张力特性进行了数值计算分析,主要结果如下:
当不考虑垂荡板阻尼效应时,对无系泊Tri-floater型浮式基础在波浪中运动周期和RAOs的计算结果与文献计算结果一致;当考虑垂荡板阻尼效应时,运动周期的变化并不明显,但RAOs值明显减小。在最大工作工况、极端工况和破损工况下,对系泊Tri-floater型浮式基础在风浪流中系泊张力的计算结果也与文献计算结果一致。在此基础上,获得了系泊缆直径、长度、预张力和布置方式等参数对其在风浪流中动力特性的影响规律,提出了一种动力响应性能更好的系泊系统设计方案。
Tri-floater原型浮式基础在波浪中的垂荡周期与东海及南海海域百年一遇波浪谱周期接近,易发生垂荡共振问题。对Tri-floater原型浮式基础的吃水和垂荡板等参数进行了改进,有效地提高了其运动周期,明显减小了其运动响应幅值。同时,针对东海和南海三个不同水深海域的海洋环境条件,设计了三种新的系泊方案,结果表明改进后的Tri-floater型浮式基础及其系泊系统能满足东海和南海百年一遇极端和破损工况下发电作业的要求。
[1] KARIMIRAD M. Modeling aspects of a floating wind turbine for coupled wave-wind-induced dynamic analyses[J]. Renewable Energy, 2013, 53: 299-305.
[2] 李春,叶舟,高伟, 等.现代陆海风力机计算与仿真[M].上海:上海科学技术出版社,2012. (LI Chun, YE Zhou, GAO Wei, et al. Caculation and simulation for modern land and ocean wind turbine[M]. Shanghai: Shanghai Science and Technology Press, 2012. (in Chinese))
[3] 尚景宏. 海上风力机基础结构设计选型研究[D] .哈尔滨:哈尔滨工程大学, 2010. (SHANG Jinghong. Study on the design and selection of offshore wind turbine foundation structure[D]. Harbin: Harbin Engineering University, 2010. (in Chinese))
[4] BULDER B H, HENDERSON A, HUIJSMANS R, et al. Study to feasibility of and boundary conditions for floating offshore wind turbines[R]. ECN, MARIN, TNO, TUD, MSC, Lagerway the Windmaster,2002.
[5] ANDREW R H, BERNARD B. Feasibility study of floating windfarms in shallow offshore sites[J]. Wind Engineering, 2003,27(5):405-418.
[6] RODDIER D, CERMELLI C, WEINSTEIN A. WindFloat: a floating foundation for offshore wind turbine-Part I:design basis and qualification process[C]//Proceedings of the 28th International Conference on Ocean, Offshore and Arctic Engineering, OMAE2009. 2009: 845-853.
[7] CERMELLI C, RODDIER D, AUBAULT A. WindFloat: a floating foundation for offshore wind turbines-Part II hydrodynamics analysis[C]//Proceedings of the 28th International Conference on Ocean, Offshore and Arctic Engineering,OMAE2009, 2009: 135-143.
[8] AUBAULT A, CERMELLI C, RODDIER D. WindFloat: a floating foundation for offshore wind turbines-Part III: structural analysis[C]//Proceedings of the 28th International Conference on Ocean, Offshore and Arctic Engineering, OMAE2009. 2009: 213-220.
[9] CHRISTIAN A C, DOMINIQUE G R. Experimental and numerical investigation of the stabilizing effects of a water-entrapment plate on a deepwater minimal floating platform[C]//Proceedings of the 24th International Conference on Offshore Mechanics and Arctic Engineering. 2005:517-525.
[10] ISHIHARA T, PHU P V, SUKEGAWA H, et al. A study on the dynamic response of a semi-submersible floating offshore wind turbine system Part 1:A water tank test[C]//Proceedings of the 12th ICWE. 2007: 2511-2518.
[11] PHU P V, ISHIHARA T. A study on the dynamic response of a semi-submersible floating offshore wind turbine system Part 2: numerical simulation[C]//Proceedings of the 12th ICWE. 2007: 959-966.
[12] 曹菡,唐友刚,陶海成,等.半潜型风机浮式基础设计及幅频运动特性研究[J].海洋工程,2013,31(2):61-67.( CAO Han, TANG Yougang, TAO Haicheng, et al. Design and frequency domain analysis of semi-submersible floating foundation for offshore wind turbine[J].The Ocean Engineering, 2013,31(2): 61-67. (in Chinese))
[13] 吴海涛,张亮,马勇,等.半潜式海上风力机平台随机响应特性分析[J].华中科技大学学报:自然科学版, 2014, 42(5): 111-121. (WU Haitao, ZHANG Liang, MA Yong, et al. Stochastic response characteristics analysis of semisubmersible platform for floating offshore wind turbine[J]. J. Huazhong Univ. of Sci. & Tech., Natural Science Edition, 2014,42(5):111-121. (in Chinese))
[14] 戴遗山.舰船在波浪中运动的频域与时域势流理论[M].北京:国防工业出版社,1998. (DAI Yishan. Frequency and time domain theory for ship motion in waves[M].Beijing: Defense Industrial Press,1998. (in Chinese))
[15] RODDIER D, PEIFFER A, AUBAULT A, et al. A generic 5 MW WindFloat for numerical tool validation & comparison against a generic spar[C]// Proceedings of the 30th International Conference on Ocean, Offshore and Arctic Engineering. 2011: OMAE 2011-50278.
[16] 中国船级社.海上移动平台入级与建造规范[S].北京:人民交通出版社, 2005.(China Classification Society. Rules for construction and classification of mobile offshore drilling units[S]. Beijing: China Communications Press, 2005. (in Chinese))
[17] 李梦阳. 海上浮式风力机平台锚泊系统设计与研究[D].哈尔滨:哈尔滨工程大学,2013.(LI Mengyang. Study on mooring system of floating offshore wind turbine platform[D]. Harbin: Harbin Engineering University, 2013. (in Chinese))
[18] ZAMBRANO T, MACCREADY T, KICENIUK T, et al. Dynamic modeling of deepwater offshore wind turbine structures in Gulf of Mexico storm conditions[C]//Proceedings of the 25th International Conference on Offshore Mechanics and Arctic Engineering. 2006: 629-634.
Dynamic response analysis of a semi-submersible wind turbine system in wind, wave & current environments
MAO Ying1, FAN Ju1, 2, ZHANG Xinshu1, 2, YOU Yunxiang1, 2
(1. State Key Laboratory of Ocean Engineering, Shanghai Jiao Tong University, Shanghai 200240, China; 2. Collaborative Innovation Center for Advance Ship and Deep-Sea Exporation, Shanghai 200240, China)
P752
A
10.16483/j.issn.1005-9865.2017.01.007
1005-9865(2017)01-0060-11
2016-01-11
国家自然科学基金资助项目(51479117)
毛 莹(1990-),女,湖北人,硕士研究生,主要从事海洋工程水动力学研究。E-mail:maoying18@163.com
范 菊(1969-),女,沈阳人,博士,副教授,主要从事海洋工程水动力学研究。E-mail: fanju@sjtu.edu.cn
