一种被动相控阵雷达搜索调度算法研究
2017-10-09皇甫一江杨玉亮赵海东江伟伟
皇甫一江,杨玉亮,赵海东,江伟伟
(1. 海军装备部信息系统局,北京 100841; 2. 中国船舶重工集团公司第七二四研究所,南京 211153)
一种被动相控阵雷达搜索调度算法研究
皇甫一江1,杨玉亮2,赵海东2,江伟伟2
(1. 海军装备部信息系统局,北京 100841; 2. 中国船舶重工集团公司第七二四研究所,南京 211153)
被动相控阵雷达在一个波束周期内可实现多波束宽角覆盖,同时波束指向可快速变化。利用该特点,合理设计搜索调度算法可灵活地完成指定空域的搜索。从被动相控阵雷达波束驻留特点出发,设计了一种基于区域交叠的搜索调度算法。算法加入随机序列控制驻留顺序,可有效避免辐射源旋转周期与驻留周期相同导致目标无法截获,在仿真环境完成算法的实现和测试。测试结果验证了算法的有效性。
被动相控阵;搜索调度;波束驻留;随机序列
Abstract: Multi-beam wide-angle coverage and rapidly variable beam pointing can be simultaneously realized in one beam cycle for the passive phased array radars. The search and scheduling algorithm can be reasonably designed to search the designated airspace flexibly by using this characteristic. From the characteristics of beam dwell of the passive phased array radars, a search and scheduling algorithm is designed based on region overlapping. The targets cannot be intercepted when the rotation period of the radiation source is identical to the dwell period. The algorithm along with the random sequence controls the dwell sequence, which can effectively avoid that situation. The algorithm is implemented and tested in the simulation environment. It is verified that the algorithm is effective through the test results.
Keywords: passive phased array; search and scheduling; beam dwell; random sequence
0 引 言
被动雷达由于其作用距离远、隐蔽性好等优点发展迅速,而相控阵技术的多波束、多功能性、灵活性、高数据率等特点逐渐应用到被动雷达的设计和研制中。[1]监视空域的搜索是相控阵雷达系统的主要执行任务之一,也是相控阵雷达系统其他功能运作的基础。相控阵雷达系统可以按照所承担的任务要求以及环境目标特性设计出多种不同的监视空域样式。[2]因此,设计合理的搜索调度算法,保证波束驻留能完成对搜索监视空域的有效覆盖与探测,对被动相控阵雷达至关重要。
现大多数研究主要针对主动搜索或者多任务的自适应调度,例如文献[3]提出了一种基于发射脉冲交错的波束驻留算法,文献[4]提出一种基于采样周期最大公约数分区的任务实时交叉调度算法,文献[5]提出一种基于目标威胁度的相控阵雷达自适应调度方法等等。这些研究对多任务调度提供了很大的参考,但缺乏针对被动探测特别是被动搜索波束调度算法的研究。
本文从被动相控阵雷达波束驻留特点出发,针对平面相控阵雷达空域覆盖范围,以及搜索任务的方位覆盖请求,在驻留时间内计算区域交叠情况,完成单次多波束搜索驻留。对当前所有搜索区任务按上述方法进行迭代,完成被动相控阵雷达的搜索调度。搜索区任务需多次驻留时,驻留顺序使用随机数进行控制,避免辐射源旋转周期与驻留周期相同导致目标无法截获。通过算法的仿真测试验证了算法的有效性。
1 搜索调度算法设计
搜索任务调度设计主要包括任务参数设计、搜索空域划分、搜索波位编排和波束驻留算法。其中任务参数设计、搜索空域划分、搜索波位编排等内容受被动雷达参数和雷达探测指标等因素的影响,可参考文献[2]、[6-7]中相关内容进行设计。本文以对海被动相控阵雷达为基础,对搜索参数进行假设,然后对波束驻留算法进行研究。
具体搜索参数设计如下:
(1) 搜索任务参数:驻留时间50 ms,频率范围1~2 GHz(范围内可任意设置),方位范围0°~360°(范围内可任意设置),带宽100 MHz;
(2) 搜索空域:对海探测,仰角水平0°,方位覆盖0°~360°;
(3) 搜索波位编排:平面相控阵天线,面阵坐标覆盖-45°~45°,采用3 dB交叠进行方位覆盖。频率通道带宽为100 MHz,使用带宽内中心频点计算波宽,例如:1~1.1 GHz对应频点1.05 GHz。中心波束指向面阵法线,由法线向面阵边缘依次编排波束,形成搜索波位表。
1.1 空域交叠模型
本文算法主要考虑方位空域交叠,所有方位对应一个俯仰。空域交叠情况使用大地坐标方位进行设计。由于波位编排及波束控制信号的产生均使用面阵坐标方位,因此需进行坐标变化,具体变换方法可参考文献[8]。
为方便对模型进行描述,作以下定义,其中方位均为大地坐标方位:
• S:搜索任务起始方位;
• E:搜索任务结束方位;
• A:面阵中第一个波束的起始方位;
• B:面阵中最后一个波束的结束方位。
S和E为搜索区任务的起始和结束方位,A和B为面阵覆盖空域范围的起始和结束,示意图如图2所示。
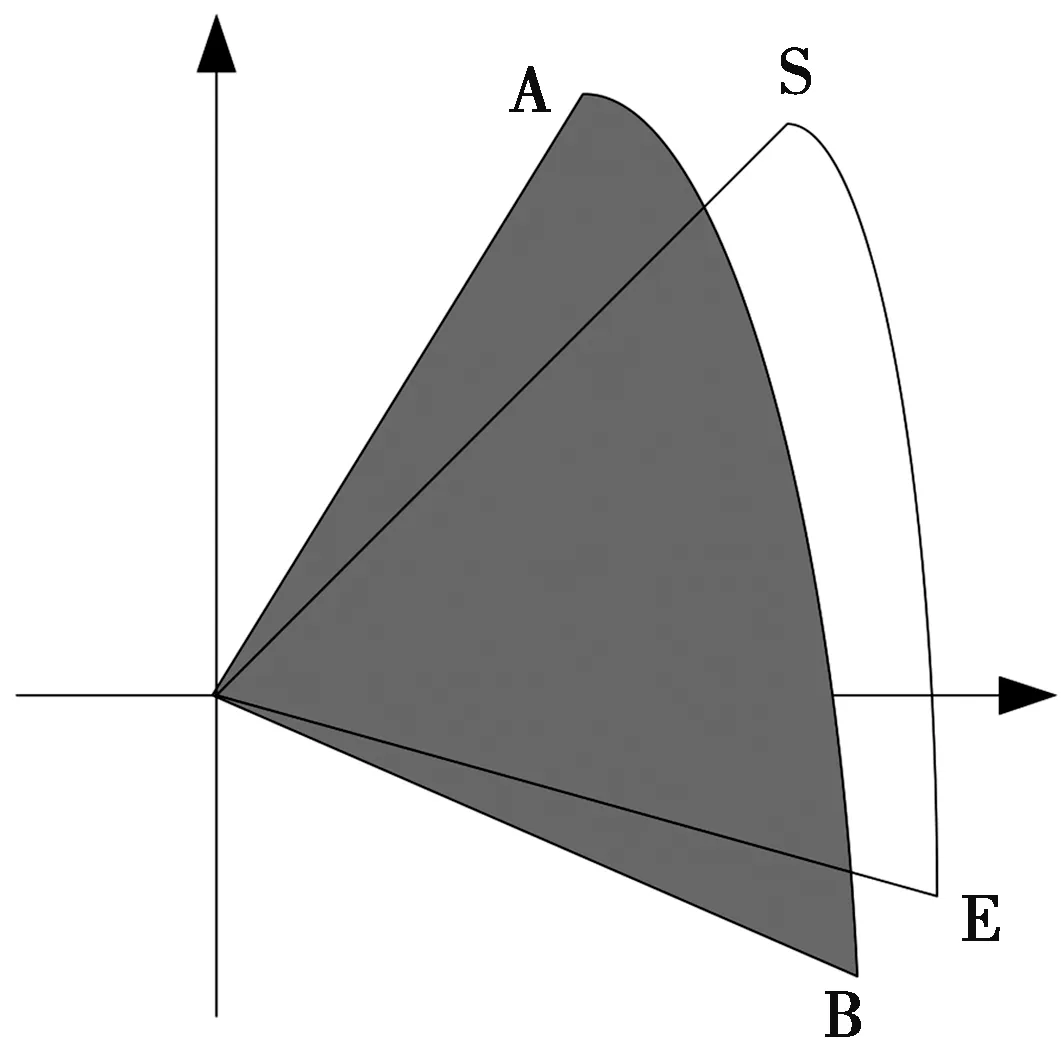
图1 面阵范围与搜索区范围交叠情况
根据S、E、A、B的相对关系,搜索区S~E与面阵覆盖范围A~B有不同的交叠情况,对应需要不同的波束驻留方法,如图1所示。
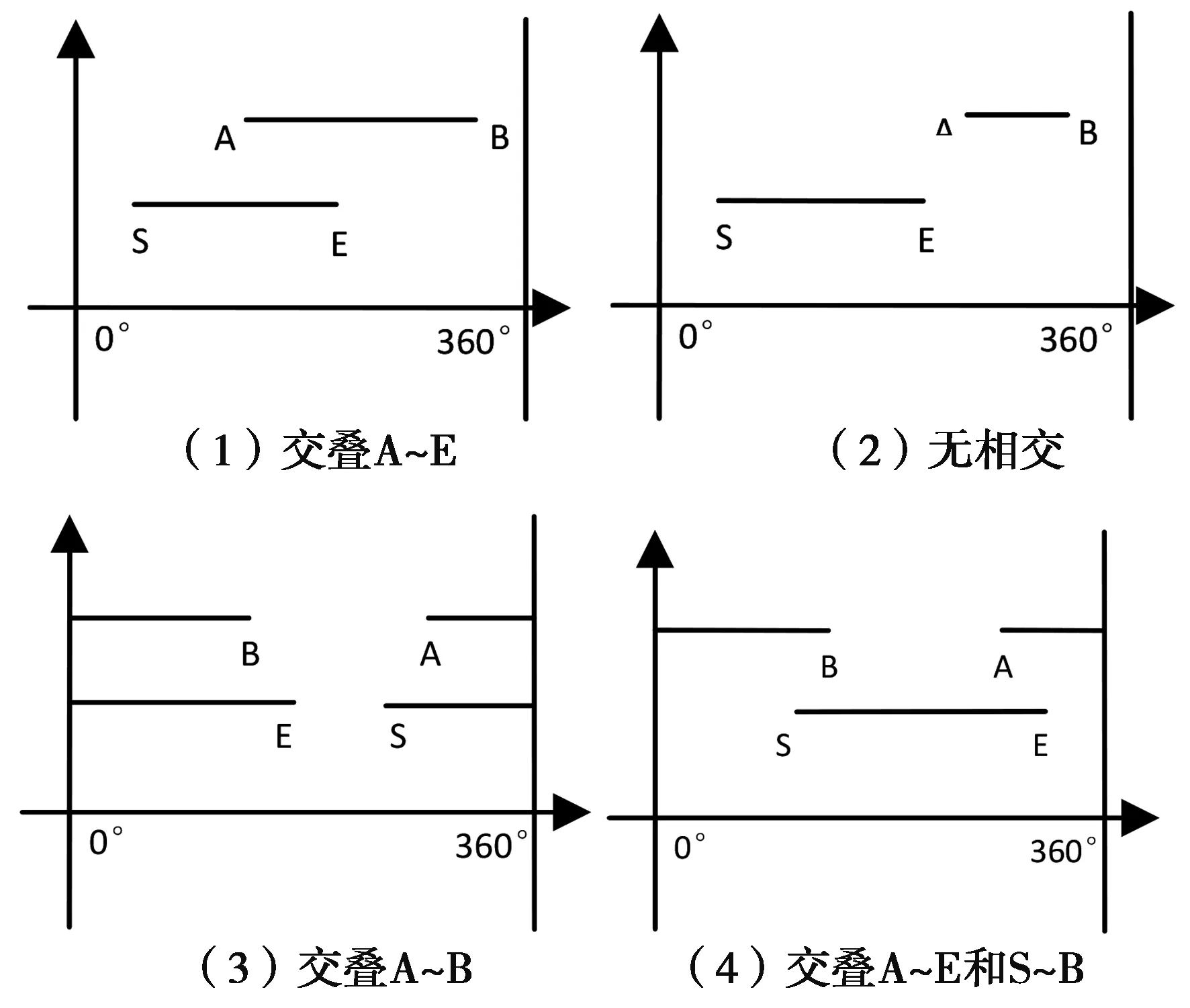
图2 交叠情况示例
由排列组合公式:A(4,4) = 4*3*2=24,共24种情况,归纳如表1所示。
1.2 区域边界计算
对于上节中的交叠模型,首先找出交叠边界在波位表中的位置,然后根据起始和结束位置的波束号完成搜索波束驻留。其中边界A和B分别对应波位表的第1个和最后1个波束,边界S和E计算方法分为3种情况,如图3所示。
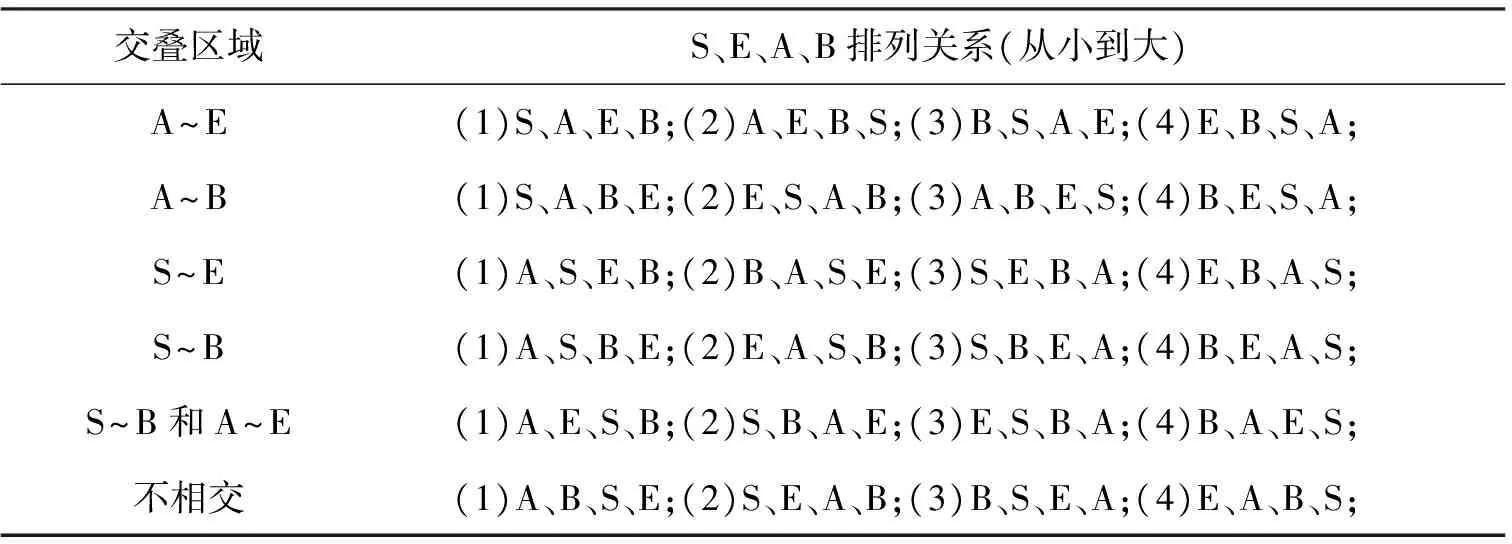
表1 区域交叠情况归纳

图3 边界情况分类
图3中,E为交叠区边界,同理S作为边界时与E的情况相同,不再赘述。
为描述计算方法,作以下定义:
• beamLocal:边界的波束位置;
• Index:安排波束时的波束索引;
• MaxCount:相应频率波位表包含的波束数;
• StartAzi [Index]:波位表中第Index波束的起始方位;
• EndAzi [Index]:波位表中第Index波束的结束方位。
边界计算方法包括以下3种:
(1) 边界算法1:初始化Index = 0,while(Index <= MaxCount), Index ++,判断E< EndAzi [Index]时,停止循环,此时的Index即为所求边界波束索引;
(2) 边界算法2:初始化Index = MaxCount,while( beamBound>0),Index --,判断E< StartAzi [Index]或者StartAzi [Index]> EndAzi [Index]时,停止循环,此时的Index即为所求边界波束索引;
(3) 边界算法3:初始化Index = 0,while(Index <= MaxCount), Index ++,判断E< EndAzi [Index]或者StartAzi [Index]> EndAzi [Index],停止循环,此时的Index即为所求边界波束索引。
1.3 随机序列生成
被动雷达搜索过程中,由于探测的目标雷达旋转,当波束驻留周期与旋转周期相同时,可能导致目标无法截获、重要目标丢失。为了避免这种巧合,本文使用随机序列改变驻留顺序,使算法更加合理。
当系统设置多个搜索区任务或单个搜索区任务跨多个频率通道时,先将搜索区任务按频率通道拆分成多个子任务,然后按区域交叠算法对其中的单个子任务进行调度。
使用两个随机序列增加搜索的随机性,其中随机序列1用于控制所有子任务的搜索顺序,随机序列2用于控制单个子任务的波束驻留顺序:
• 随机序列1:根据搜索任务队列中子任务的个数,假设为n,对1~n进行随机排序,得到随机序列1,按该序列取对应子任务进行波束驻留;
• 随机序列2:根据搜索任务队列中子任务的个数,假设为n,生成一个长度为n的随机序列2,序列中每一个数均为0或1,随机产生,0表示子任务从右边界开始搜索驻留,1表示子任务从左边界开始搜索驻留。
2 算法实现
算法实现时建立两个任务:搜索申请接收任务和搜索申请调度任务。任务间通信采用共享内存。调试机模拟显控发送搜索区任务,并使用看门狗定时器定时释放信号量控制调度时间片,驱动任务的执行。算法实现流程如图3所示。
3 测试结果及分析
测试场景1:假设单次最多8波束驻留,面阵覆盖范围90°,调整面阵法线的大地坐标方位,并设置多个搜索区,使其满足表2中的所有交叠情况,对算法进行验证。测试输入如表2所示。

图4 算法实现流程
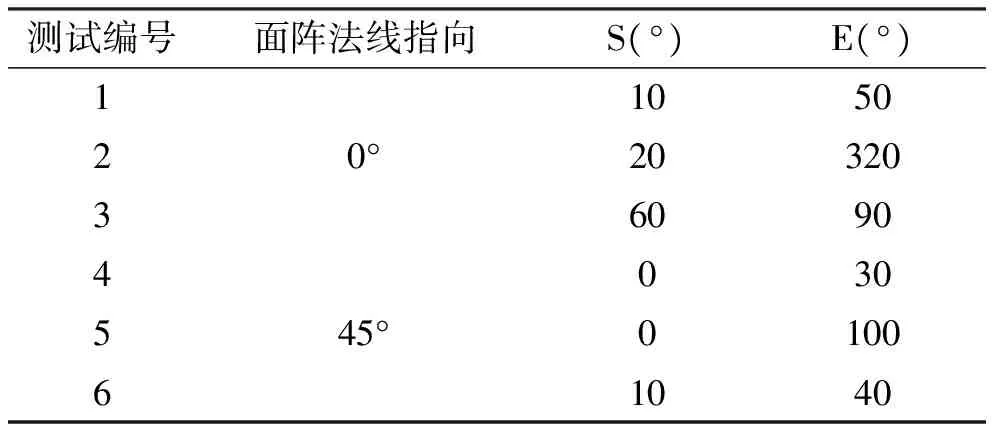
测试编号面阵法线指向S(°)E(°)1230°105020320609045645°03001001040
表2中,S为搜索区起始方位,E为搜索区结束方位。面阵法线为0°时面阵覆盖大地坐标315°~45°,面阵法线为45°时面阵覆盖大地坐标0°~90°。设计的测试用例满足表2中6类交叠情况。通过采集调度输出,查看搜索波束驻留情况,测试结果如表3所示。
测试结果表明,算法完成了面阵与搜索区交叠方位的全覆盖,验证了算法在各交叠情况的有效性。
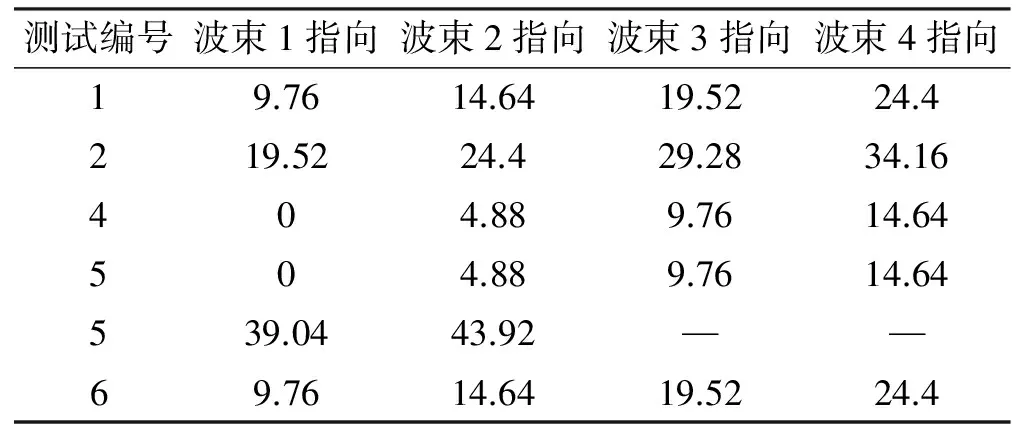
表3 场景1测试结果

表3(续)
测试场景2:假设单次最多8波束驻留,在测试频率下波宽为4.88°,8波束可覆盖39.04°;面阵法线指向45°,即面阵覆盖范围为0°~90°。设置多个与面阵交叠的搜索区,验证驻留顺序的随机性。测试输入如表4所示。

表4 测试场景2输入参数
表4中,S为搜索区起始方位,E为搜索区结束方位。设置的搜索区均需两次驻留,采集调度输出,并使用matlab进行分析。搜索区1第1次驻留表示为1.1,第2次驻留表示为1.2。类似,搜索区6第1次驻留表示为6.1,第2次驻留表示为6.2。画出200次驻留的散点图,测试结果如图5所示。图中,横坐标为驻留序号,纵坐标为搜索区的驻留情况。图(a)、图(b)分别对应两次搜索调度运行结果数据。

图5 驻留顺序测试结果
由单个图可看出,驻留顺序无规律,是随机的;两个图对比,标注出的点驻留波束也是随机的。测试结果表明,各搜索区的波束驻留顺序满足随机驻留的要求。
4 结束语
在被动相控阵雷达中,多波束、宽覆盖应用广泛。本文设计了一种基于区域交叠的搜索调度算法,通过设置不同搜索区,可以灵活地覆盖指定空域,并增加了波束驻留顺序的随机性。通过测试验证了算法能够满足被动相控阵雷达的搜索波束驻留需求。本文设计的算法可为被动相控阵搜索调度提供参考。
[1] 唐永年.雷达对抗工程[M]. 北京:北京航空航天大学出版社,2012.6.
[2] 毕增军,等.相控阵雷达资源管理技术[M]. 北京:国防工业出版社,2016.8.
[3] 程婷,等.一种数字阵列雷达自适应波束驻留调度算法[J].电子学报,2009(9).
[4] 叶朝谋,等.基于周期分区的相控阵雷达任务交叉调度研究[J]. 电子与信息学报,2014(2).
[5] 张浩为,等. 基于目标威胁度的相控阵雷达自适应调度方法[J].火力与指挥控制,2016(6).
[6] 张光义,等. 相控阵雷达技术[M]. 北京:电子工业出版社,2010.8.
[7] 谢俞秋.等.被动相控阵雷达自适应调度算法研究[J].计算机仿真,2013,7(7).
[8] 曹正才.舰载雷达常用稳定方式坐标变换[J].雷达与对抗,2010(1).
Study on a search and scheduling algorithm of passive phased array radars
HUANGFU Yi-jiang1, YANG Yu-liang2, ZHAO Hai-dong2, JIANG Wei-wei2
(1.Information System Bureau, Naval Equipment Department, Beijing 100841; 2. No.724 Research Institute of CSIC, Nanjing 211153)
TN958.52
A
1009-0401(2017)03-0001-04
2017-08-10;
2017-08-22
皇甫一江(1980-),男,技术九级,硕士,研究方向:雷达光电技术;杨玉亮(1987-),工程师,硕士,雷达资源调度;江伟伟(1984-),工程师,硕士,雷达数据处理;赵海东(1992-),助理工程师,硕士,雷达资源调度。
