麦克风阵列声源定位系统的研究
2017-09-28李焕
李焕
(第八中学,北京,100071)
麦克风阵列声源定位系统的研究
李焕
(第八中学,北京,100071)
随着多媒体技术的进一步发展,语音接收和声音信号处理得到了日益广泛的关注和应用,而声源的定位和声源增强是实现语音增强,语音识别的前提和基础。基于麦克风阵列的声源定位技术由于其广泛的应用前景得到了众多学者的关注。单个麦克风接收到的信息量较少,缺少声源定位所需要的信息,而麦克风阵列克服了上述的缺点,利用了各麦克风信号之间信号的相关性对数据进行相关分析和处理从而实现声源的定位。文中阐述了麦克风阵列声源定位的原理,推导计算目标方位角、俯仰角以及距离的计算公式;阐述了硬件系统的组成以及各个部分的作用并通过实验进行了系统的测试,通过对测试数据的分析得出麦克风阵列声源定位系统能够实现声源的快速定位。
麦克风阵列;声源定位;测试
0 引言
声源定位是麦克风阵列系统的应用方向之一,在声源跟踪、语音接收和信号的目标跟踪等领域都有着广泛的应用。静音环境下的声源定位很容易做到,然而在实际的环境中,麦克风阵列采集的语音信号受到噪声和混音的干扰,本文中研究如何在混响和有噪环境下提高声源定位的精度。
1 麦克风阵列声源定位原理
由四个麦克风传感器构成的四阵元麦克风声源定位系统的传感器分布如图1所示,M1,M2,M3,M4表示四个麦克风传感器。采用直角坐标系,则四个麦克风阵元的位置坐标为,目标点位置S的坐标为 S ( x, y, z),目标S距原点距离为r , 方位角为ϕ,俯仰角为θ。
在直角坐标系中可以得到如下方程组:
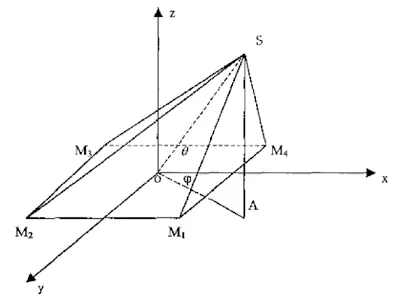
图1 麦克风阵列阵元位置
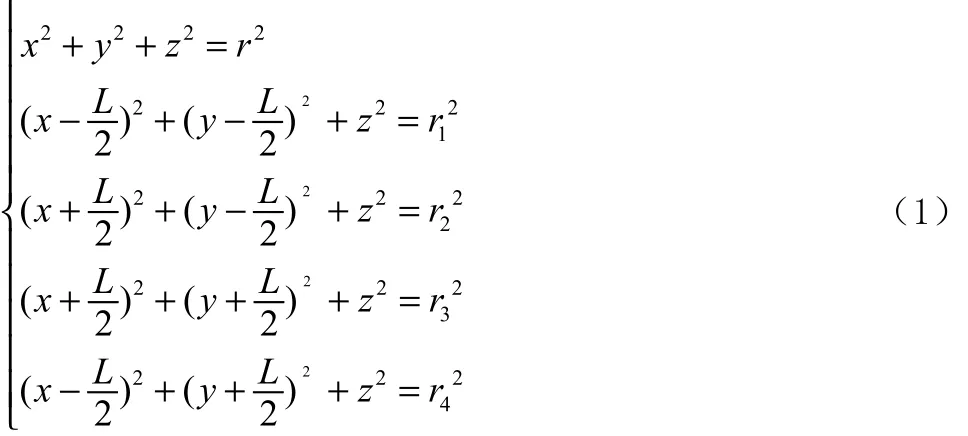
在球坐标系中,可以得到方程组:

以上两个方程组联立,可得:

由泰勒展开,并忽略高次项,令:

其中,ijd 表示声音到第i个阵元和第j个阵元传播的差程。经计算可得:

由(6)(7)(8)三式,即可求得目标的方位角,俯仰角以及距麦克风阵列的距离。
2 硬件设计
麦克风阵列声源定位系统的硬件部分主要由四个电容式麦克风传感器、滤波电路、麦克风专用低噪音放大电路、信号采集部分组成。整个系统组成框图如图2所示。

图2 系统组成框图
其中,电容式麦克风传感器利用电容大小的变化,将声音信号转化为电信号,具有体积小,效果好的特点,具有较宽的频率响应和较高的灵敏度。本麦克风阵列的四个麦克风阵元位于变长为18cm的正方形定点处。
滤波部分主要是保留20KHz以内的人耳可听的音频信号,滤除高频干扰,便于后续的放大电路对音频信号进行放大。麦克风专用低噪音放大器进行音频信号的放大,采用固定增益20db,经过放大以后,音频信号的输出就可以满足信号采集卡的输入电压要求。麦克风阵列低噪音音频放大电路如图3所示。
麦克风阵列的信号采集部分采用USB-6216专用信号采集卡,具有16位模拟输出端,可以同时完成16路-10--+10V电压的模拟信号的采集,最高采集速度可达400KS/s。经过信号采集卡采集回的数据传输给上位机,再由上位机利用matlab进行计算,得到声源的位置角度等信息。
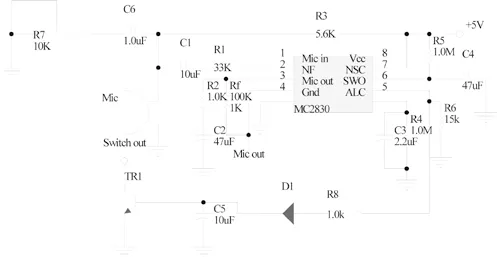
图3 麦克风阵列低噪音音频放大电路
系统的上位部分主要是利用labview控制信号采集卡进行数据采集、matlab进行互相关函数的运算,得到声音到达两两麦克风之间的时延差,进而计算得到声源的位置角度等信息。
在实际实验时,两个麦克风接收到的声音时间差可以通过求两个麦克风接受到的信号之间的互相关求得,可以由互相关函数的最大值对应的横坐标得到时延进而求得方向角、俯仰角、距离。在室内由于受到混响等因素影响,实验结果可能出现较大误差,在室外空旷处实验可以得到相对较好的结果。
3 测试数据分析
考虑到室内混响回声等因素的影响,本实验选择在室外较为空旷的地方进行,受声源音量大小的限制以及麦克风灵敏度的影响,本实验选择了相对较近的三处声源进行实验。实验得到的测试如表1-表3所示。
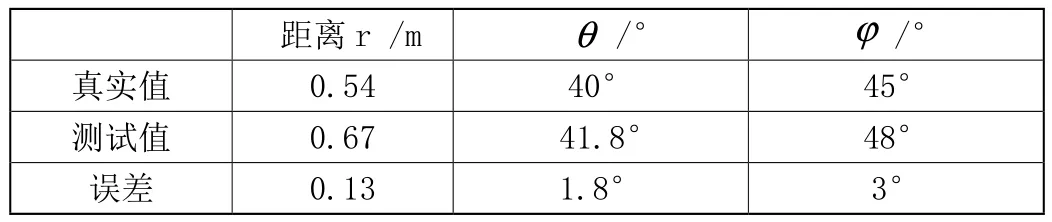
表1 实验一测试结果
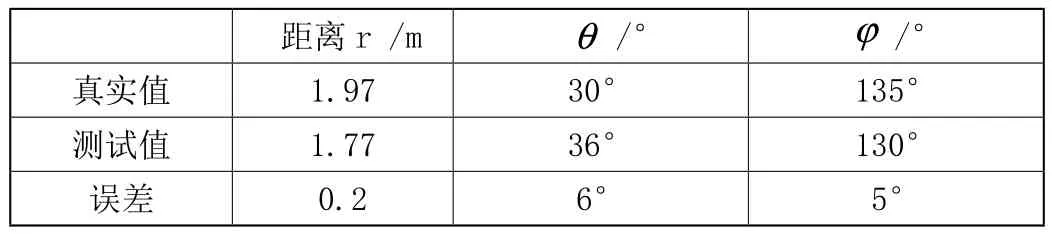
表2 实验二测试结果
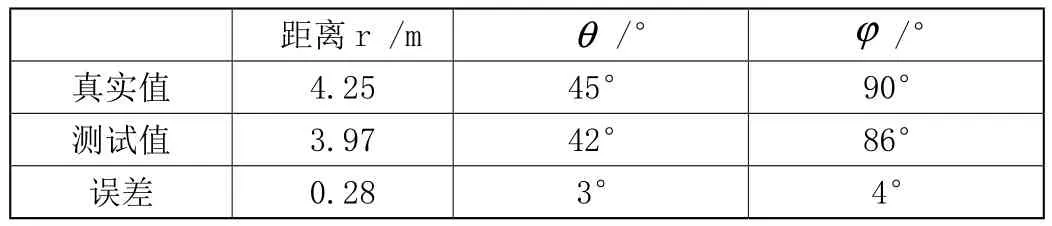
表3 实验三测试结果
经过对实验测试数据的分析和研究,麦克风阵列声源定位的功能基本可以实现,但仍有一些误差,误差的大小主要受到快拍数的影响,同时,地面的回声等多径效应也能造成一定的干扰,实验条件和场地对测得的结果也有一定影响。在后续matlab数据处理求两个信号的互相关函数时,可以加上一定的限制条件,防止相关函数峰值位置受回声等影响。
4 结束语
本文中介绍了麦克风阵列声源定位原理和麦克风阵列声源定位系统的硬件构成,并进行了实验进行了数据的测量,对测量数据的分析研究得出系统定位的精确度较高,获得较好的定位结果。
[1]李杨,基于小型麦克风阵列的声源定位系统设计与实现[D].哈尔滨工业大学.2014.
[2]彭奎, 一种基于麦克风阵列的声源定位系统[D].安徽大学.2014.
[3]宗志亚,基于麦克风阵列的室内声源定位方法研究[D].重庆大学.2012.
[4]张芳,基于STM32的麦克风阵列声源定位系统的研究[D].燕山大学.2013.
[5] 赵秀粉,基于麦克风阵列的声源定位技术研究[D].电子科技大学.2013.
[6] 李志金;乔杰,基于SMT320DM642麦克风阵列声源定位系统[J].测控技术. 2011.
[7] 张雷岳;张兴敢;刘超, 麦克风阵列声源定位中时延估计的改进[D].南京大学学报.2015.
[8] 张艳娜,基于麦克风阵列的多声源定位算法研究[D].沈阳航空航天大学.2013.
[9] 姚培洋,基于麦克风阵列的声源定位算法研究及装置实现[D].东北大学.2013.
[10] 王勇;刘颖;刘建平, 一种基于麦克风阵列的声源定位算法研究[D].现代电子技术.2011.
Research on Microphone Array Sound Source Location System
LI huan
(BEIJING No.8 HIGH SCHOOL,Beijing,100071)
With the further development of multimedia technology,Voice reception and voice signal processing has been increasingly widespread attention and application,The sound source location and sound source enhancement is the premise and foundation of the achieve voice enhancement, voice recognition. Based on the microphone array of sound source positioning technology has been concerned by many scholars because of Its widely application. A single microphone receives less information, Missing information required for sound source location, While the microphone array overcomes these shortcomings, Using the correlation between the signals of the microphone signals to analyze and deal with the data in order to achieve the positioning of the sound source. This paper describes the principle of microphone array sound source location, Derive the calculated target azimuth、Pitch angle and distance of the calculation formula; The composition of the hardware system and the role of each part is described, And the system was tested by experiment, Through the analysis of test data, it is concluded that the microphone array sound localization system can realize the rapid localization of sound source.
Microphone Array;Sound Source Location;Test
