港口船舶位置目标图像跟踪监测研究*
2017-09-22尹秀玲安博文艾依来提阿不都艾尼祖丽菲娅斯马依
尹秀玲,安博文,艾依来提·阿不都艾尼,祖丽菲娅·斯马依,吴 艳
(1. 上海海事大学 信息工程学院,上海 201306; 2. 中国石油塔里木油田分公司油田办公室,新疆 塔里木 841000;3. 中国石油塔里木油田分公司塔中油气开发部,新疆 塔里木 841000; 4. 广西科技大学,广西 柳州 545006)
港口船舶位置目标图像跟踪监测研究*
尹秀玲1,安博文1,艾依来提·阿不都艾尼2,祖丽菲娅·斯马依3,吴 艳4
(1. 上海海事大学 信息工程学院,上海 201306; 2. 中国石油塔里木油田分公司油田办公室,新疆 塔里木 841000;3. 中国石油塔里木油田分公司塔中油气开发部,新疆 塔里木 841000; 4. 广西科技大学,广西 柳州 545006)
由于船舶目标成像小,江面干扰噪声大,船舶遮挡及连续多帧丢失等因素影响监测精度,在图像连续帧间创建位置、速度、面积等匹配方程进行跟踪存在匹配问题。为解决上述问题,提出一种多结构Top-hat变换和改进的SVD-UKF算法进行检测跟踪。通过分析船舶几何特征来设计多结构元素Top-hat变换检测船舶;在改进的SVD-UKF基础上定义自适应阈值和路径连贯性函数匹配方程进行跟踪以提高监测精度。实验结果证明,该算法可提高监测精度,跟踪稳定,并解决了船舶遮挡及连续多帧船舶丢失等问题,满足实时性需求。
监测精度;顶帽变换;无迹卡尔曼滤波;自适应阈值;路径连贯性
0 引言
随着航海事业的迅速发展,各港口船舶流量不断加大,实现智能化监管已成为海事监管的发展趋势。船舶检测与跟踪对实现实时监控船舶、提高港口监测系统的工作效率及航海运输安全性有重要意义。
港口监控系统多采用固定监控视角,对船舶位置目标图像监测时,易受海天背景、光照、江面杂波及干扰噪声等影响,文献[1]提出的混合高斯背景建模方法虽然可有效抑制波纹干扰,提供船舶完整几何特征,且算法简单、实时性好,但由于江面光照变化大、干扰噪声大,对背景更新造成严重干扰;文献[2]可直接检测视频中运动船舶,不需先知道场景信息,但计算量大,不能满足实时性要求;文献[3]对光照变化不太敏感,但不能完全提取运动船舶的特征点,易造成船体内部空洞。对船舶跟踪时,粒子滤波算法[4]必须采样足够多的粒子才能较好提取船舶的特征信息进行跟踪,计算量大;当船舶颜色与背景、干扰物颜色相近或船舶发生遮挡时,Meanshift算法[5-6]和Camshift算法[7]就会跟踪失败。
针对上述光照影响、江面杂波、船舶遮挡、丢帧导致船舶位置目标跟踪失败或误差大等问题,本文提出一种多结构元素的Top-hat变换算法检测船舶,并将改进的SVD-UKF(Singular Value Decomposition- Unscented Kalman Filter)[8-9]与特征匹配方程结合起来跟踪船舶轨迹,有效抑制江面杂波,降低虚假率,解决船舶连续多帧丢失及船舶遮挡等问题,在保证跟踪准确的前提下,提高了监测系统的工作效率。
1 船舶位置目标检测
本文采用多结构元素Top-hat变换[10-11]算法来检测船舶。结构元素[12]的尺寸选择对Top-hat变换算法至关重要,本文根据船舶一般为矩形及与背景的几何特征差异[13]设计了沿水平夹角0°、45°、90°、135°四个方向的不同尺寸的结构元素。
令g为输入图像,y为输出图像,ζ为权值系数,g1i、g2i(i=1,2,3,4)为不同结构元素的开运算。采用式(1)进行改进的Top-hat运算。
y=ζ*g∘mean(g1i)+(1-ζ)*g∘mean(g2i)
(1)
式中,通过mean(g1i)求平均值将4个不同方向的图像融合得到背景图像。
2 船舶位置目标跟踪监测
本文采用改进的SVD-UKF预测估计船舶运动状态,并定义自适应阈值、路径连贯性匹配方程进行船舶特征信息匹配,以提高监测精度。
UKF[14]以UT(Unscented Transform)变换为基础,根据随机变量的统计量选取一系列σ样本点,通过非线性变换,使样本均值和协方差与真实均值和协方差近似。
(1) 自适应阈值
提取船舶最小外接矩形坐标点(xmin,ymin)、宽(wk)和高(hk)等特征信息。定义船舶的质心坐标(xk,yk)为:
(2)
则相邻两帧同一船舶的质心距离d和面积差值D(xk,yk)分别为:
(3)
运动船舶特征信息匹配时的质心阈值tc和面积阈值ts分别定义为:
(4)

(2) 路径连贯性
基于船舶运动的速度及方向在较短时间内不会发生突变的前提,认为船舶运动轨迹具有连贯性。路径连贯性函数Φ反映了船舶运动的速度及方向等信息,可作为运动目标轨迹和运动约束之间的一致性度量。运动目标i在二维投影平面中的运动轨迹可表示为:
Ti=(Xi,1,Xi,2,…,Xi,n)
(5)
式中,Xi,k为运动目标i在第k帧的位置矢量。第k帧运动目标i的路径偏差di,k表示为:

(6)
当视频帧率足够高时,认为船舶运动速度和方向在视频图像中是平滑变化的。则φ为:
φ(Xi,k-1,Xi,k,Xi,k+1)=
(7)
式(7)中,角度θ和距离lk、lk+1如图1所示,且满足式(8)。由图可知,由于目标的运动方向不会发生突变,Xi,k+1的位置应在扇形区域内,不在此区域的运动目标在信息匹配时视为干扰目标,判定匹配失败。
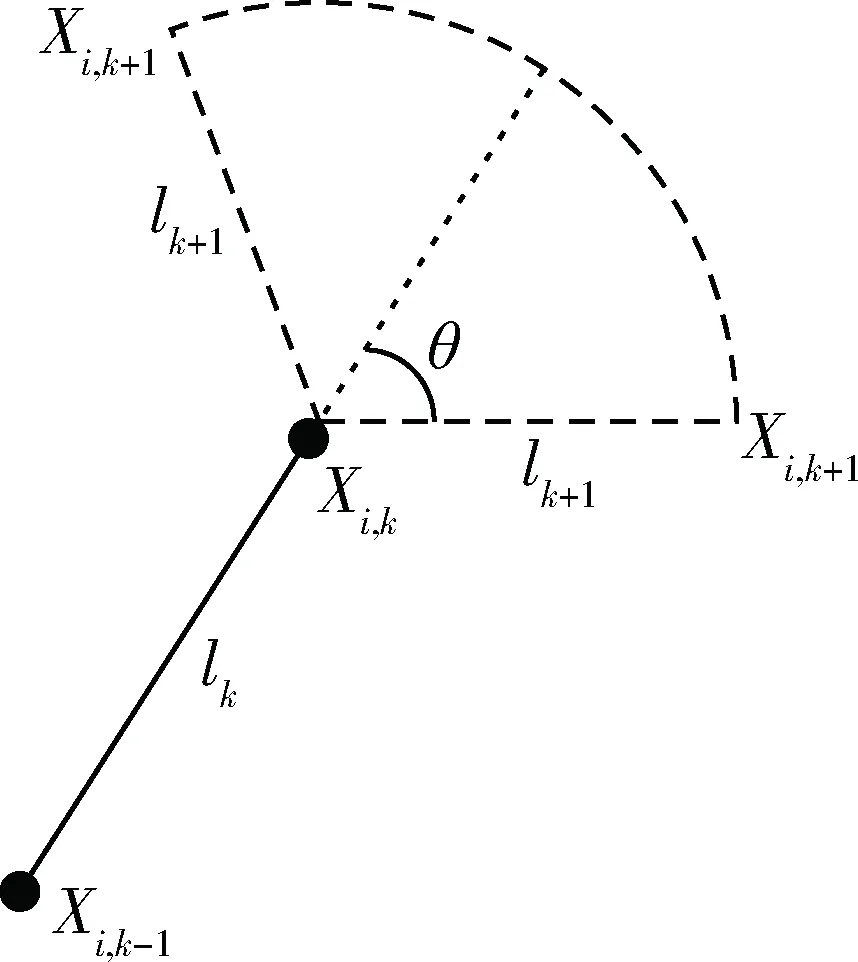
图1 路径连贯性目标运动区域

(8)
匹配的最佳准则是N个运动目标i的总体路径偏差D(i,k)最小,运动目标有最大轨迹连贯性。
(9)
(3) 匹配方程
相邻两帧图像的N个独立目标i和目标j进行质心和面积匹配方程定义为:
(10)
式中,μ1、μ2为常系数,且μ1+μ2=1,一般取μ1=μ2=0.5。M(i,j)值越小,目标i和目标j越相似,匹配成功率越高。
对目标进行特征信息匹配时,建立匹配矩阵,定义匹配矩阵M为:
(11)
式中,行和列分别为当前帧和前一帧检测到的目标,N和R为当前帧和前一帧目标总数。
进行矩阵匹配时,分两种情况:
① 理想运动情况下(不考虑遮挡),扫描匹配矩阵,按式(12)规则给矩阵赋值,矩阵中值为1的为最佳匹配结果,认为匹配成功。
(12)
式中,M(i,j)每行按从大到小排列,将最小的5个数值求平均值作为阈值T。
② 当运动目标出现遮挡或丢帧时,应适当增大跟踪搜索区域,避免目标跟踪失败。当目标开始交互时,增大卡尔曼搜索区域,扫描匹配矩阵,按式(13)规则给矩阵赋值。
(13)
矩阵匹配后,通过船舶的自适应阈值和轨迹约束条件进行筛选,若满足式(14),则目标相似度最高,信息匹配成功,认为是同一目标。
(14)
3 实验结果及分析
根据船舶特征,采用两种结构元素加权进行开运算,加权系数ζ=0.35,图2是不同检测算法对同一图像的检测结果。由图(b)知,对于运动缓慢的船舶,易被漏检;由图(c)知,背景减除法易受光照变化等动态背景影响,出现大量干扰噪声点;由图(d)知,不能满足光流法灰度假设;由图(e)知,当选择单一结构元素过小时,会出现虚假目标;由图(f)知,多结构元素Top-hat算法既能抑制干扰噪声及杂波,又能准确检测目标。
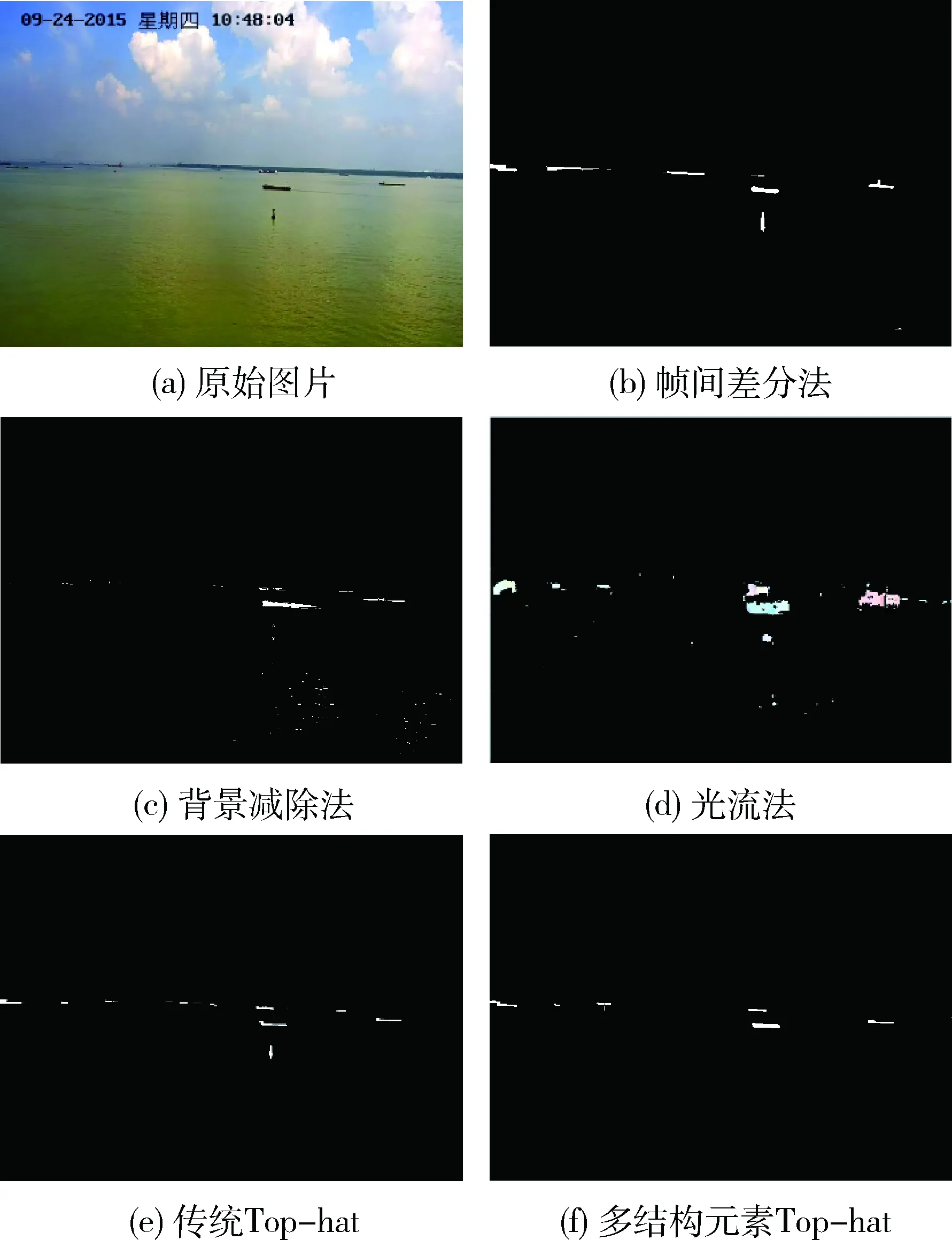
图2 船舶检测结果
表1是不同检测算法处理后的剩余波纹条数对比,经多结构元素Top-hat处理后的剩余波纹条数明显减少,对背景杂波抑制效果更好。
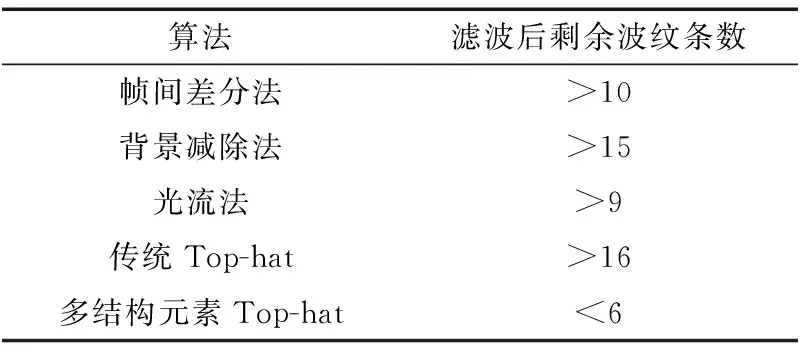
表1 背景杂波抑制比较
表2为不同检测算法对港口监控视频中连续25帧图像中的船舶进行检测,并分别统计误检率及检测运行时间。由表知,本文算法既能保证目标检测的准确率,又具有实时性。
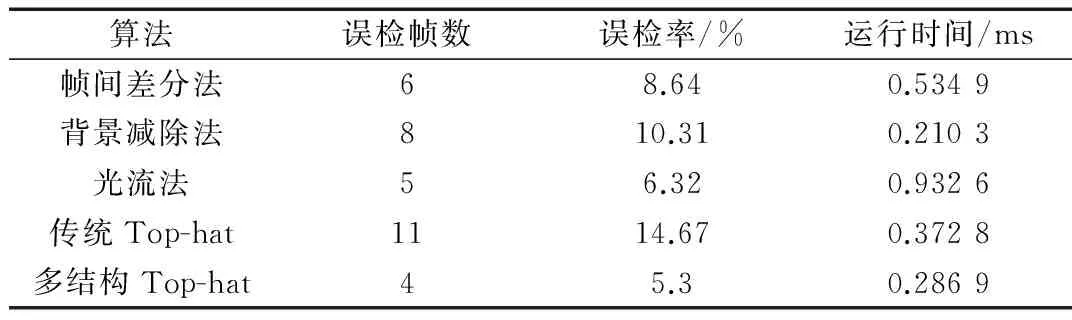
表2 5种算法检测比较
对船舶进行编号,并跟踪船舶运动轨迹。图3为船舶连续多帧丢失时跟踪的结果。比较图(b)、(c),5号船在第262帧消失,第293帧被重新检测到,中间相差31帧;比较图(c)、(d),4号船丢失49帧后,被重新检测到;本文算法通过改进的SVD-UKF预测其运动状态,当重新检测到该船舶时,立即校正其估计值,因此能继续对该船舶进行准确跟踪。
图4为船舶出现、遮挡、分离、消失时的跟踪结果。图(b)中6号船出现,2号船被1号船遮挡,图(c)中1、2号船分离,4、5号船消失,图(d)为船舶运动轨迹。由图知,当出现遮挡时,尽管船舶颜色相似且被遮挡,但本文通过特征匹配方程对目标匹配,仍能用预测值对卡尔曼滤波器更新,因此可以继续对船舶进行准确跟踪。
图5为2号船在x方向的实际轨迹和文献[15]及本文算法预测跟踪轨迹。由图知,本文算法在第21帧开始收敛,且误差降低在1像素内,比文献[15]的收敛速度更快,误差率更小。
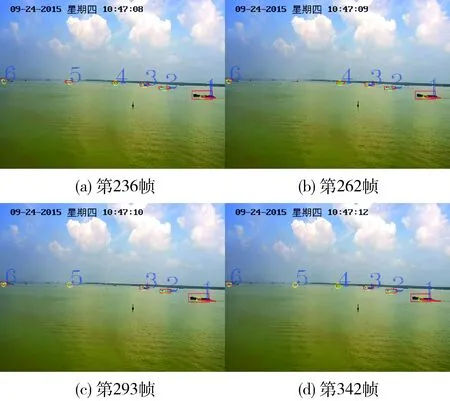
图3 船舶连续多帧丢失跟踪结果
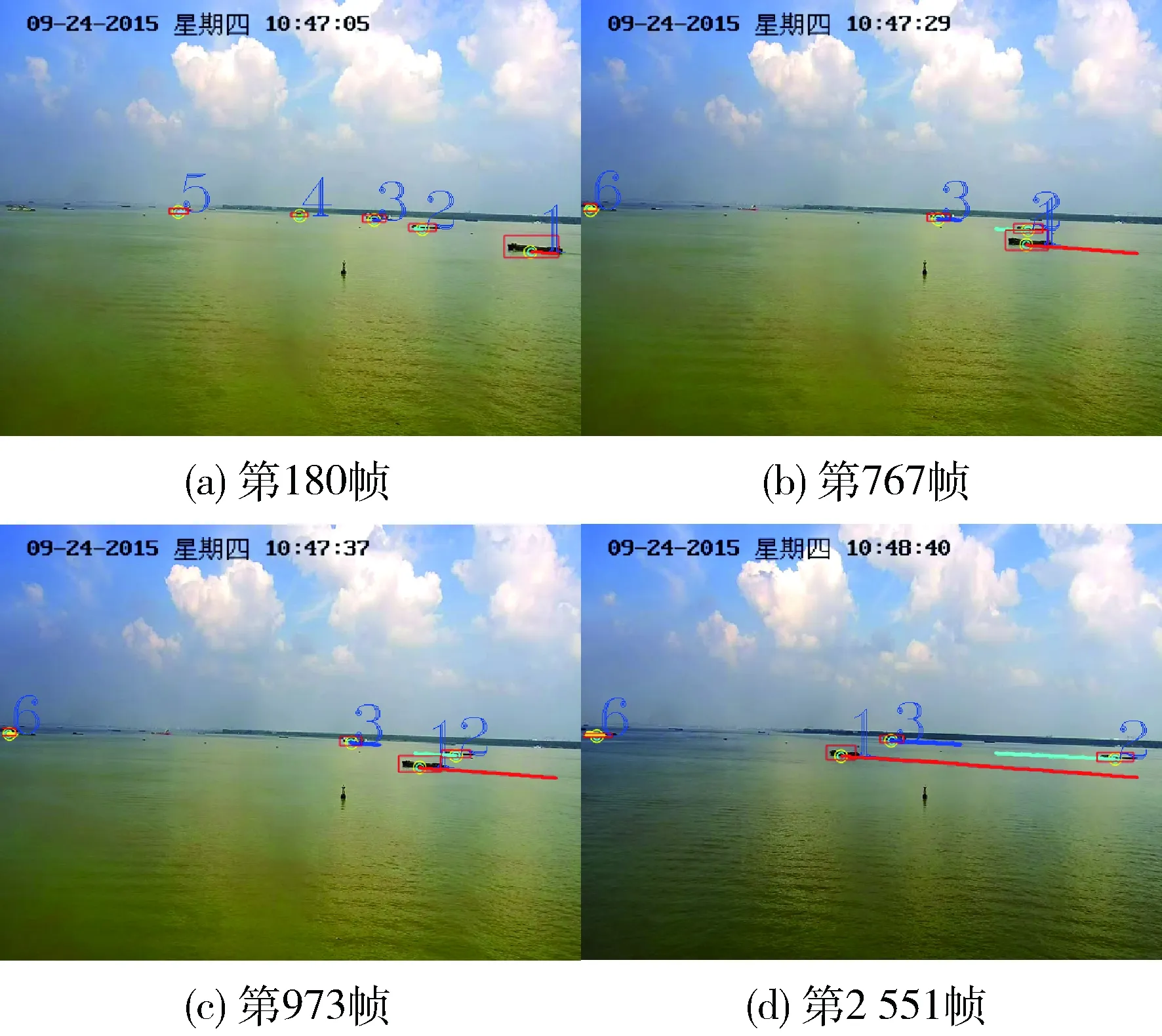
图4 船舶出现、遮挡、分离、消失时跟踪结果
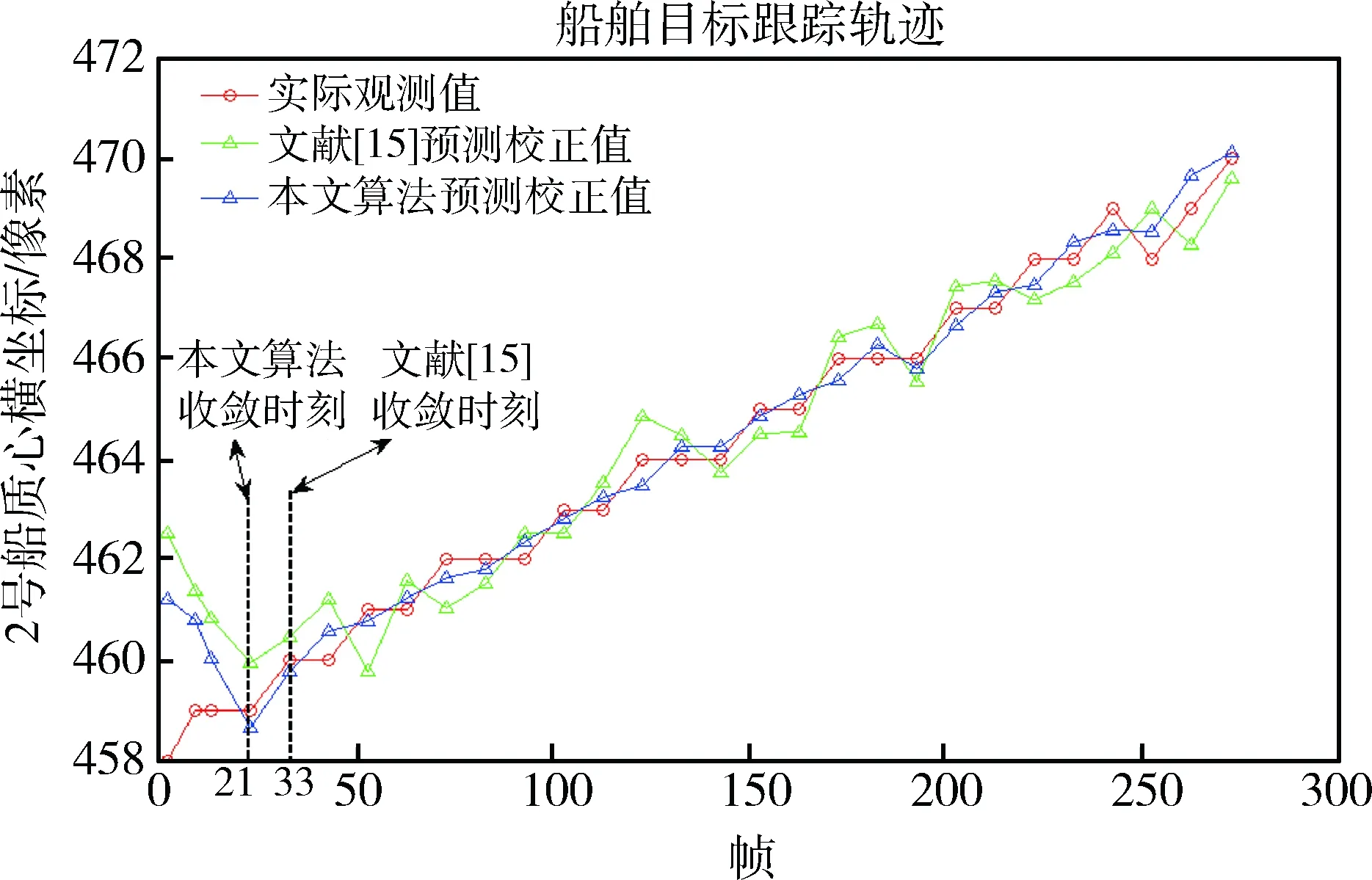
图5 2号船舶轨迹跟踪图
4 结束语
本文先通过多结构元素Top-hat变换算法检测船舶,并进行连通域标记,有效抑制背景杂波,提高了目标检测准确率;再通过改进的SVD-UKF并结合特征匹配方程实现对船舶的准确跟踪,提高了匹配速度及监测精度,解决了船舶遮挡及连续多帧船舶丢失等问题。经过对实际监控视频的测试,本文算法能够准确、高效地对船舶进行检测与跟踪,具有较好的实时性。
[1] 蒋明,潘姣丽.一种改进的混合高斯模型背景估计方法[J].微型机与应用,2011,30(11):31-33.
[2] 陈添丁,胡鉴,吴涤.稀疏光流快速计算的动态目标检测与跟踪[J]. 中国图象图形学报, 2013, 18(12): 1593-1600.
[3] 林佳乙, 于哲舟, 张键,等. 基于背景差分和帧间差分法的视频运动检测[J]. 仪器仪表学报, 2011, 24(4): 111-115.
[4] 陈龙, 郭宝龙, 孙伟. 基于 FCM 聚类的粒子滤波多目标跟踪算法[J]. 仪器仪表学报,2011, 32(11): 2536-2542.
[5] NING J, ZHANG L, ZHANG D. Robust mean-shift tracking with corrected background-weighted histogram[J]. Iet Computer Vision, 2012, 6(1):62-69.
[6] KARAVASILIS V, NIKOU C, LIKAS A. Visual tracking by adaptive kalman filtering and mean shift[C]. Conference on Artificial Intelligenee: Theories, Models and Applications, 2010, 6040: 153-162.
[7] EXNER D, BRUNS E, KURZ D, et al. Fast and robust CAMShift tracking[C]. 2010 IEEE Computer Society Conference on Computer Vision and Pattren Recognition-Workshops, CVPRW 2010, 2010:9-16.
[8] 杨卓东,张欣,张涛,等.改进自适应中值滤波的图像去噪[J].通信技术,2015,48(11):1257-1260.
[9] 安博文, 胡春暖, 刘杰, 等. 基于Hough变换的海天线检测算法研究[J]. 红外技术, 2015, 37(3):196-198.
[10] 叶斌, 彭嘉雄. 基于形态学Top-hat算子的小目标检测方法[J]. 中国图象图形学报, 2002,7(7):638-642.
[11] 陈恩庆, 李晓磊. 采用多结构元素模板的形态学边缘检测新算法[J]. 计算机工程与应用, 2013, 49(17):146-149.
[12] 王文豪, 陈晓兵, 刘金岭. 基于连通区域和SVM特征融合的火灾检测[J]. 计算机仿真, 2014, 31(1):383-387.
[13] 刘亦书,杨力,华孙倩.轮廓矩不变量及其在物体形状识别中的应用[J].中国图象图形学报,2004,9(3):308-309.
[14] ZHANG H T. Unscented Kalman filter and its nonlinear application for tracking a moving target[J]. Optik-International Journal for Light and Electron Optics, 2013, 13(3): 4468-4471.
[15] SOKEN H E, CILDEN D, HAJIYEV C. Attitude estimation for nanosatellites using singular value decomposition and unscented kalman filter[C]. International Symposium on Space Technology and Science, 2015.
Simulation research on port ship position traking for monitoring
Yin Xiuling1, An Bowen1, A-buduaini Ai-yilaiti2, Si-mayi Zu-lifeiya3, Wu Yan4
(1. College of Information Engineering, Shanghai Maritime University, Shanghai 201306, China;2. General Manager’s Office of CNPC Tarim Oil Company, Tarim 841000, China;3. Tazhong Oil and Gas Development Department of CNPC Tarim Oil Company, Tarim 841000, China;4. Guangxi University of Science and Technology, Liuzhou 545006, China)
Due to the factors like small target vessel imaging, river interference noise, ship occlusion and consecutive frames missing that effect monitoring precision, there exists matching problems in creating position, speed, and area between image frames. To solve the problems above, we proposed a algorithm combined with the method based on multi-structure elements of Top-hat transform and improved SVD-UKF to realize detection and tracking. The adaptive threshold value and path continuity function matching equation were defined on the basis of SVD-UKF to improve the monitoring accuracy. Experimental results show that the algorithm can improve the accuracy of the monitoring and tracking stability and solve the problems of ship occlusion and missing in consecutive frames, and meet the real-time requirements.
monitoring accuracy; Top-hat transform; UKF; adaptive threshold; path coherence
广西教育厅科研项目(9YB 2014207)
TP391.9
:A
10.19358/j.issn.1674- 7720.2017.17.011
尹秀玲,安博文,艾依来提·阿不都艾尼,等.港口船舶位置目标图像跟踪监测研究[J].微型机与应用,2017,36(17):38-41.
2017-03-02)
尹秀玲(1991-),通信作者,女,硕士研究生,主要研究方向:智能信息处理及图像处理。E-mail:xiulingy@126.com。安博文(1969-),男,教授,博士生导师,主要研究方向:遥感图像的获取与处理、信号检测与信息处理及海缆监测。艾依来提·阿不都艾尼(1981-),男,助理工程师,主要研究方向:信号与信息处理。
