改进的vibe算法在危化品车辆运输视频监控系统中的应用
2017-09-20陈乃想何立平金充充
◆陈乃想 何立平 金充充
(浙江万里学院 浙江 315100)
改进的vibe算法在危化品车辆运输视频监控系统中的应用
◆陈乃想 何立平 金充充
(浙江万里学院 浙江 315100)
由于传统的vibe前景检测算法存在无法消除鬼影、受动态背景变化影响较大的问题,本文对传统的vibe算法进行改进。vibe算法是通过视频第一帧初始化背景模型,但是当第一帧当中包含前景目标时,鬼影将伴随着模型的初始化而产生。vibe算法没有对鬼影做任何处理,导致vibe算法需要花费很长时间才能消除鬼影。针对传统vibe算法中出现鬼影问题,只需在vibe算法前景检测之前先获取相对真实的背景在将真实的背景用来初始化背景模型。因此本文首先通过三帧差分法得到差分图像,根据直方图当中有明显的双峰特性使用大津分割,二值化处理。最后获得除运动目标外的部分的真实背景图片,之后对未填充的背景使用八领域填充和最近领域背景像素填充。再将相对真实的背景图片用来初始化背景模型。最后使用vibe算法前景检测顺利地消除了鬼影。vibe算法易受动态背景影响较大,那是因为传统的vibe算法的匹配阀值是固定的,而在危化品车辆运输过程当中必然会受到光照、风等外部因素的影响,使得vibe前景检测出现大量的误检。因此本文通过用自适应阀值来替换固定匹配阀值的方法,以此来提高vibe算法抗干扰的能力。实验结果表明,改进的vibe前景检测算法比传统的vibe前景检测算法相比有所改善,在危化品车辆运输视频监控系统中不仅提高了检测的准确度,而且还提高了抗干扰能力。
Vibe算法;运动目标检测;视频监控;危化品车辆运输
0 引言
视频监控是现代社会安防系统的重要组成部分,视频监控的处理越来越趋向于智能化和自动化[1]。人们需要其能够自动采集信息、智能分析和处理数据以及自动反馈结果[2]。而危化品车辆运输视频监控系统的环境更为复杂,背景多是动态场景,噪声较多,运输车辆的速度各不相同。这就需要一个稳定的运动目标检测算法进行处理。
运动目标检测的前景是准确分割出目标[3],目前主流的运动目标检测方法有三类:光流法[4]、帧间差分法[5]和背景减除法[4-11]。背景减除法中常用的Vibe算法是一种高效的像素级视频背景建模和前景减除算法,多用于危化品车辆运输视频监控系统的处理。但其存在以下不足:
(1)当第一帧图像中有运动目标时,会检测出来一个虚拟运动目标,那就是鬼影。尽管vibe算法可以通过在后续的帧来更新背景模型,以消除鬼影,但是这样的方式消除鬼影耗时较长。如果在鬼影还没有完全消除时,有运动目标出现在鬼影区域,那么会造成运动目标检测的准确度下降。
(2)对光照强弱等动态场景比较敏感,当视频场景中出现光照突然变弱或者变强、水面的闪烁,树叶的摇动等现象,传统的vibe算法会误以为有运动目标出现,进而导致出现大面积的误检。
针对以上这些问题,本文通过研究传统vibe算法,对传统vibe算法进行了改进。(1)消除鬼影。由于vibe算法在通过视频第一帧进行初始化背景模型时,如果第一帧当中包含前景目标,鬼影将会伴随着模型的初始化而产生。因此想去掉鬼影,如何获取真实的背景进行初始化背景建模是关键。首先通过三帧差分法得到差分图像,根据直方图当中有明显的双峰特性使用大津分割,二值化处理。此时获得除运动目标外的部分背景图片,为了获得完整的背景图片需要对部分背景图片进行八领域填充和最近领域背景像素填充。最后将获取到的真实的背景图像,用来初始化背景模型。(2)消除光照变化、闪烁等误检。当vibe算法检测的视频场景中出现光照突然变弱或者变强、水面的闪烁、树叶的摇动时,会出现大面积的误检。那是由于传统的vibe算法其匹配阀值是固定的而引起的。vibe算法中的匹配阀值是区分前景像素和背景像素的关键,前景检测的准确度跟匹配阀值的取值有直接关系。首先传统的vibe算法因为使用的匹配阀值是固定不变的,因此适用于静态视频场景中。而在动态视频场景中背景会随着光线的变弱或者变强、水面的闪烁、树叶的摇动变化,而此时如果还使用固定匹配阀值那么会让vibe算法误以为是运动目标从而导致大面积的误检。因此针对这种情况,本文提出自适应阀值,当动态背景变化较大时阀值设置较大,当动态背景变化较小时阀值设定也较小。
综上所述,本文针对传统vibe算法的不足,提出了改进方法。本文通过两组视频进行实验,以验证改进后vibe前景检测算法的性能。
1 ViBe算法原理简述
Vibe算法[12]的原理主要包含背景模型的初始化、运动检测、背景模型的实时更新三个模块。
1.1 背景模型初始化。
背景模型的建立就是为图像中每个像素建立各自的样本集,记当前图像的一个像素点为x,样本集为,如果通常每个像素的样本集数是20,记n为20。背景模型建立好了之后,就需要对样本集进行初始化,所谓的初始化就是通过选择当前像素点的领域像素点的值来进行填充背景样本集。
1.2 运动目标检测。
由于vibe运动目标检测算法是像素级别运动目标检测,vibe运动目标检测实际上就是像素分类的一个过程。如图1 vibe算法分类模型。为中心,半径的球体计算与的欧式距离,根据与交集的个数判断当前像素属于前景还是背景。
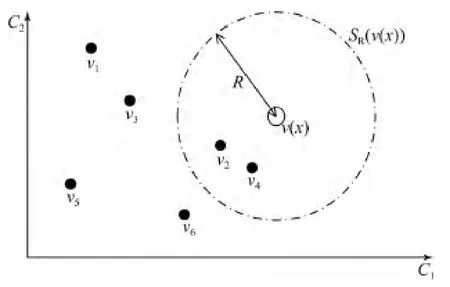
图1 vibe算法分类模型
1.3 背景模型更新
采用保守的更新策略用来更新vibe算法的背景模型。保守的更新策略是指一旦某个像素被判定为前景像素,那么该像素点将一直不会填充到背景样本集中,这也意味着该像素点永远不会更新背景模型。当像素点被判定为背景像素时,那么随机选择背景样本集中的一个值来进行更新,同时也更新该领域的背景样本值。由于所有背景样本是等概率的情况下随机选择更新,某个样本值在特定的时间没有被更新的概率[13]为
,并且经过一段时间后,仍然保留该样本值的概率为公式(1):
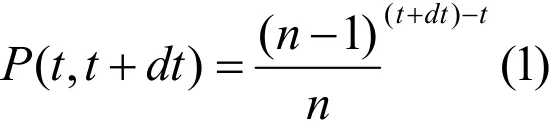
可以看出vibe前景检测算法中的样本更新与时间无关,采样方式是无记忆,这种更新方式提高了vibe算法的动态适应能力。
2 提出算法的改进
尽管随机取样和无记忆的更新策略使得vibe算法性能比较优越,但是仍存在需要改进的地方。本文针对原算法中存在鬼影和动态场景敏感的问题做了改进,用来提高vibe前景检测的准确度。
2.1 针对鬼影的改进
鬼影是由于vibe算法在通过视频第一帧进行初始化背景模型时,如果当第一帧当中包含前景目标时,鬼影将会伴随着背景模型的初始化而产生。因此在进行vibe算法之前先获取真实的背景图像是关键。本文通过三帧差分法背景建模获取相对准确的背景图像,利用准确的背景图像填充背景样本完成背景模型的初始化,最后通过前景检测检测出运动目标。
具体步骤为:
首先设定预处理帧数、帧处理步长,当前处理帧号,背景生成帧号,则第帧图像为表示的是帧图像,表示的是帧图像。
从t帧开始,令。首先把视频序列中连续的三帧图像进行灰度化处理。然后进行差分运算。因为差分后的图像的直方图有明显的双峰特征表示背景像素和前景像素之间的方差比较大,因此使用大津分割。最后使用二值化处理。根据获得的差分图像就能知道除了前景位置之外的部分的真实背景信息。这个时候获得的背景信息并不是完整的背景图像,因此需要对不完整的背景图形进行填充,继续执行以下步骤完成背景图像的填充,从而获得相对真实的背景图像。
如果没有,转到(3)。
如果有,将第i帧此位置的像素进行八领域填充为背景。
如果第t帧图像运动目标位置的像素已经全部填充完毕转(3)。
如果时,如果存在背景像素还没有被填充,那么选择背景像素中其领域像素值进行近似填充。如果已经全部填充了,输出相对准确的背景图像。
将获取到的相对准确的背景图像用来构建每个像素的背景模型,然后根据前景检测获取运动目标,最后进行二值化处理。为vibe前景检测算法检测到的二值图,可表示为:

2.2 针对动态视频场景敏感提出改进
传统vibe算法的匹配阀值不适应动态背景下的前景检测。因此本文采用自适应阀值来替代固定的匹配阀值。自适应阀值是如果背景变化较大,则自适应阀值将匹配阀值设置大一点,如果背景变化较小则将匹配阀值设置的小一点。


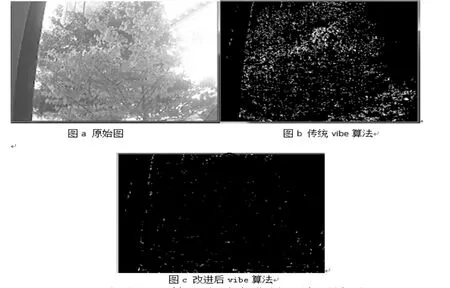
图2 改进vibe算法在动态背景下检测效果

2.3 改进后的vibe运动目标检测
(1)首先通过三帧差分法背景建模获取相对真实的背景图像,之后将准确的背景图像建立20背景样本图像,完成背景建模。
(3)前景检测时,如果前景像素被判定为背景像素,那么更新该像素的背景。设定时间采用因子为16,以十六分之一概率更新背景像素的样本集中的样本值。
3 实验结果分析
首先当测试的视频第一帧图像中含有运动目标,因此均存在鬼影。 从图1中可以看出改进后的vibe算法没有出现鬼影,相比较传统vibe算法准确度更高。
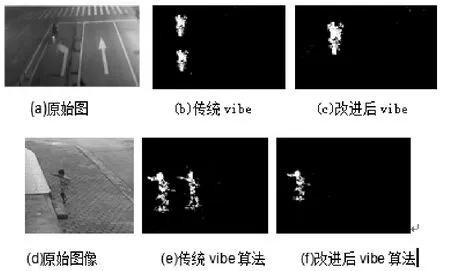
图1 改进ViBe算法消除鬼影效果
其次测试的是背景会出现动态变化的视频,如下图2,图(a)和图(b)分别是视频原图像和传统算法,在有风吹树叶扰动的背景下传统vibe算法会出现大量的误检测点。而图(c)是改进vibe算法检测效果,可以从图像中看出大面积的误检点已经去除,检测效果更加准确。
4 结论
本文对Vibe原算法进行了研究分析,针对其在危化品车辆运输视频监控系统中vibe算法运动目标检测的不足,提出了一种改进算法。改进的vibe算法与传统的vibe算法在鬼影、动态背景变化影响较大方面相比较,得到了很大的改善,提高了目标检测的准确度。
[1]MAHMASSANI,HANI S,Data-driven intelligent transportation systems:a survey[J]. Intelligent-transportation Systems,2011.
[2]张仲瑜,焦淑红.多特征融合的红外舰船目标检测方法[J].红外与激光工程,2015.
[3]ZHANG B, PERINA A,LI Z, Bounding multiple Gaussian uncertainty with application to object tracking [J]. International Journal of Computer Vision,2016.
[4]Wixson I.Detecting Seilient Motion by Accumulating Directionally Consistent flow[J].IEEE Trans.Pattern Analysis and Machine Intelligence,2000.
[5]张磊,史金飞,罗翔.运动目标检测的差分图像分析研究[J].工业仪表与自动化装置,2007.
[6]Barnich O,van Droogenbroeck M. ViBe : A powerful random technique to estimatc the background in video sequences[C]//Proc.Int.Conf.Acoust,Speech Signal Process,2009.
[7]Caseiro R,Henriques J,Martins P.Anonparametric riernannian framework on tensor field with application to foreground segmentation[c]//ICCV,2011.
[8]McIvor A.Background subtraction techniques [C]//Proc.Ima-geVis.Comput, Auckland. New Zealand , Nov,2000.
[9]Benezeth Y,Jodoin P,Emile B, Review and evaluation of commonly-imlemented background sub-strction algorithms[C] // Proc.IEEE,Int.Conf.Pattern Recognit,2008.
[10]Parks D,Fels S, Evaluation of background subtraction algo-rithms with post-processing [C]// Proc. IEEEIn t. Conf.Adv . VideoSignal Based Surveillance.Santa Fe, New Mexico, 2008.
[11]Joshi K A,Thakore DG.A Survey on Moving Object Detection and Tracking in Video Surveillance System[J]. Internationnal Journal of Soft Computing and Engineering, 2012.
[12]Barnich O,Van Droogenbroeck M, ViBe: A universal back-ground substraction algorithm for vido sequences[J].IEEE Transactions on Image Processing, 2011.
[13]Van Droogenbroeck M,Paquot O.Background subtraction:Experiments and improvements for ViBe[C].//Computer Vision and Pattern Recognition Workshops(CVPRW),2012 IEEE Computer Society Conference on. IEEE,2012.