采用声发射技术预测机器人机械故障的可行性研究
2017-09-18朱振军尹瑞荣姜锡鲁叶建伟
朱振军,尹瑞荣,姜锡鲁,叶建伟
(上汽通用汽车有限公司 整车制造工程,上海 201206)
采用声发射技术预测机器人机械故障的可行性研究
朱振军,尹瑞荣,姜锡鲁,叶建伟
(上汽通用汽车有限公司 整车制造工程,上海 201206)
本文进行了声发射技术对机器人机械故障预测的可行性研究,选取事件计数和幅度作为预测故障的主要参数,并通过对机器人的拆解验证,确定声发射技术可以预测机器人机械故障。
声发射;机器人;故障预测
工业机器人是制造业实现数字化、智能化和信息化的重要载体,在汽车行业有广泛应用。上汽通用汽车有限公司工业机器人应用比例很高。同时,工业机器人是典型的复杂性产品,集成了诸多先进技术和核心零部件,其自身的维护也是一项复杂的工作。对于流水线式生产企业,机器人突发故障停机,会造成长时间生产中断,企业损失巨大。目前机器人的故障预测局限于电压、电流、PLC等电信号,对于机械故障是间接测量,缺乏及时性和准确性。根据上汽通用汽车的排故经验,机械故障相较于电气故障往往造成更多的维修时间和停机损失。因此公司急需一种直接检测机器人机械故障的手段。《ISO22096-2006 声发射用于机械状态监测的总体指导建议》中指出声发射技术对于研究机械部件的润滑、磨损和轴承故障是可行的。因此上汽通用汽车开展了应用声发射技术预测机器人机械故障的可行性研究。
1 声发射技术基本原理
声发射(Acoustic Emission,AE)是指材料局部能量的快速释放而发出瞬态弹性波的现象。利用仪器检测、分析声发射信号并利用声发射信息推断声发射源的技术称为声发射技术。声发射有很宽的检测频带,可以避开一般的振动频带获得更高的信噪比,对检测方向和形状不敏感。声发射检测适用于早期损伤、润滑失效、低速旋转机械、自身振动大等工况。
2 声发射信号分析
声发射信号有多项参数,本次研究发现事件计数和幅度可作为评判机器人机械状态的主要参数。
事件计数:声发射信号的波形,经过包络检波后,波形超过预置的阈值电压形成一个矩形脉冲。如果一个突发型信号形成一个矩形脉冲叫做一个事件,这些事件脉冲数就是事件计数,见图1。事件计数可以评估声发射的强度,并区分不同的信号来源。
幅度:声发射信号波形中的最大振幅值,反映了事件的大小,与阈值电压大小无关,其大小决定事件的可检测性,可作为声发射源的强度大小的评价,与缺陷的大小有关。
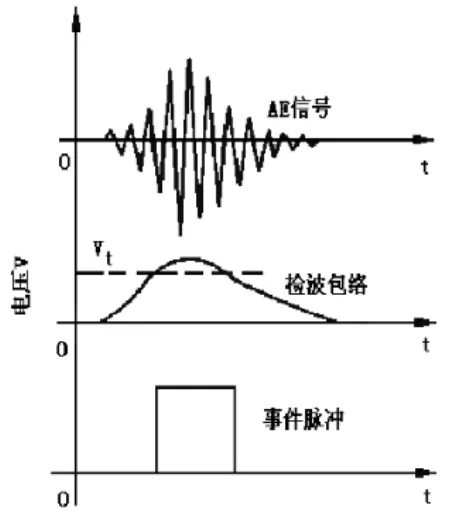
图1 事件计数
3 故障预测研究
3.1 研究对象
为了研究事件计数和幅度对机器人机械故障的预测准确性,研究选取了三台不同运行时间,且在日常运行维护中发现有状态差异的机器人作为研究对象,见表1。由于高负荷工况和工作频次,J2、J3轴的减速器故障频次相对较高,因此作为此次研究的主要部件。

表1 机器人运行信息
3.2 检测分析
测试过程中,J2 轴测试时,J2和J3运动,其它关节静止;J3轴测试时,只有J3旋转,其它关节均静止。每个位置上的测试动作包括机械臂往返完整循环。声发射传感器安装在距离减速机最近的端面上,三台机器人的传感器安装位置基本一致。J2轴信号分析:本次测试中,机器人1(图2)中没有密集信号,只包含加减速中的零星信号。机器人2(图3)和机器人3(图4)的J2 轴信号总体上有相似性,每个动作周期内均有两个信号簇,每个簇内均包含密集的频率一致的冲击信号。

图2 机器人1的J2轴测试信号

图3 机器人2的J2轴测试信号

图4 机器人3的J2轴测试信号
J3轴信号分析:机器人1(图5)中只包含零星的信号,低于100mV。机器人2(图6)和机器人3(图7)的J3轴信号差别较大,机器人2主要包含一个密集信号簇,以及加减速中的零星信号,其中密集信号幅度约120mV,低于机器人3中的500mV。机器人3中信号幅度大,但频率低,在动作的往返阶段都产生信号。机器人2 中密集信号频率较规则,机器人3信号中没有明显的规律性,表明两种信号的来源是不同的。
以上三台机器人的事件计数和幅度信号与运行时间的分别对应关系如图8、9。

图6 机器人2的J3轴测试信号

图7 机器人3的J3轴测试信号

图8 事件计数与工作时间关系
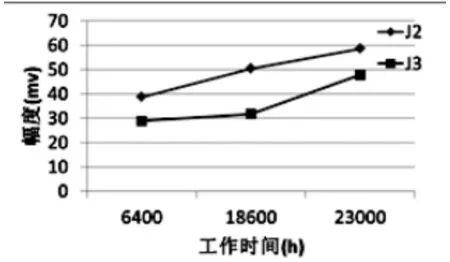
图9 幅度与工作时间关系
从以上三个不同运行时间机器人的两个主轴测试对比分析中可以发现以下规律:第一,声发射信号的数量与结构故障的存在与否有密切的关系。3号机器人的J3轴全速运行中报警停机以及2号机器人J2中存在异常噪声,这些位置的信号中都可以看到非常多的声发射信号。而1号机器人状态良好,测试中只有零星的信号。第二,声发射信号的幅度与故障的发展程度有对应关系。2号和3号机器人的J2轴声发射信号总体上非常类似,但前者的信号幅度低于后者,表明后者程度更为严重,这与其工作时间更长也是吻合的。对于J3 轴,3号机器人声发射信号幅度也比2号机器人高。实际中3号机器人的J3轴全速运行时停机,故障程度也更严重。
第三,分析对比不同机器人的相同关节,声发射信号的模式与故障类型可能存在一定的关系。2号和3号机器人的J3信号存在显著差异,前者信号幅度小,但频率稳定,后者幅度高,频率无明显规律,表明两台机器人J3轴的故障类型是不同的。
3.3 拆解验证

图10 轴承故障
结合机器人的运行记录及声发射理论分析,决定对3号机器人J3轴进行拆解验证。拆解后发现其轴承滚动体与一侧轴承外圈摩擦,有均匀磨损和压痕(图10)。证明声发射理论分析和故障机理一致,说明采用声发射技术研究机器人机械故障是可行的。
4 结语
本文进行了声发射技术对机器人机械故障的预测研究,选取事件计数和幅度作为预测故障的主要参数,并通过对机器人的拆解验证,确定声发射技术可以预测机器人减速器机械故障。
同时,在研究中发现不同机器人之间存在信号模式的差异,可能与故障类型存在一定的关系。下一步将深入研究信号模式和故障类型之间的联系。
[1]ISO22096-2006.声发射用于机械状态监测的总体指导建议.
[2]声发射检测.国防科技工业无损检测人员资格鉴定与认证培训教材编审委员会.机械工业出版社.
TH878
A
1671-0711(2017)09(上)-0083-04