基于两轴数控系统的数控环缝自动焊接机设计探索
2017-09-15曹永雄
曹永雄
(广东省佛山市三水区技工学校,广东 佛山 528137)
基于两轴数控系统的数控环缝自动焊接机设计探索
曹永雄
(广东省佛山市三水区技工学校,广东 佛山 528137)
文章针对现有焊接机的人机交互性差、程序不开放等问题,设计了两轴数控系统控制的数控环缝自动焊接机。由数控系统可控制摆动器和焊机的启停工作,使用步进电机来做驱动电机,通过一轴控制焊接工件的旋转位置和速度,另一轴焊枪上下移动的位置和速度。该设计操作简单、效率高效、开放性强、焊接质量可靠、外形美观。
焊接件;数控焊接;自动化
目前,自动焊接技术在国外已经具有比较成熟的技术,焊接工艺与设备也在不断的升级当中,但国内的自动焊接技术方面却相对略显不成熟,大多采用手工焊接,而自动环缝焊接则采用的是PLC控制技术,其人机交互性比较差,程序不开放,不能进行二次开发,因此有必要对其进行改进。
1 数控环缝自动焊接机的总体设计方案
文章设计了两轴数控系统控制下的数控环缝自动焊接机,由数控系统可控制摆动器和焊机的启停工作,使用步进电机来做驱动电机,焊接工件的旋转位置和速度由一个轴控制,焊枪上下移动的位置和速度则由另一个轴来控制,如图1所示。

图1 数控环缝自动焊接机的总体设计方案
2 数控环缝自动焊接机的整体结构设计
数控环缝自动焊接机由数控系统、门架、进送传动系统、主传动系统、焊枪摆动器、滚轮架、送丝机和焊接电源等组成,如图2所示。①焊接电源采用二氧化碳气体保护的NB500焊机,焊丝规格则用Φ1.2mm或Φ1.6mm。②门架采用钢焊门式结构,表明抛光处理,确保足够的刚性与强度。③数控系统选用两轴数控系统,摆动器启停指令采用M08/M09,焊接启停指令采用M10/M011,由X轴控制焊枪上下进给,Z轴控制工件旋转、焊接与摆动器启停。④焊接摆动器采用专用型,焊枪的摆动频率与幅度可以自由调节,摆频范围为0~120次/分,摆动角度为0~10°;焊枪手动角度范围为1~90°,焊枪中间停留时间和两侧停留时间均为0~5s。⑤进给传动系统由数控系统中X轴来完成,可以确保焊枪的移动位置及上下移动的速度,以10N·m的扭矩驱动电机使用步进电机,再由联轴器将焊枪与丝杠螺母连在一起做上下进给运动。⑥主传动系统则由数控系统中Z轴做主运动来完成,主传动系统可以精确地控制工件转动的圈数与转速,以24N·m的扭矩驱动电机使用步进电机,同时以1:35的传动比来代用摆线针式减速器运动,直接连接三爪卡盘。在对主传动系统进行编程时,采用G01Z(W)_F_的运动指令,工件转动圈数由重点绝对坐标(增量坐标)来表示,即Z(W)。具体计算方法为系统Z轴驱动器设定的丝杠螺距乘以主电机配减速机的传动比。

图2 控环缝自动焊接机实物结构图
3 数控环缝自动焊接机的控制电路设计
数控环缝自动焊接机的控制电路包括主电路(如图2所示)、控制电路(如图3所示)两个部分。其中摆动器电机为100W,主轴与进给步进电机为10N·m。M口为数控系统的M功能接口,T口为数控系统的电动刀架接口。

图3 控环缝自动焊接机主电路
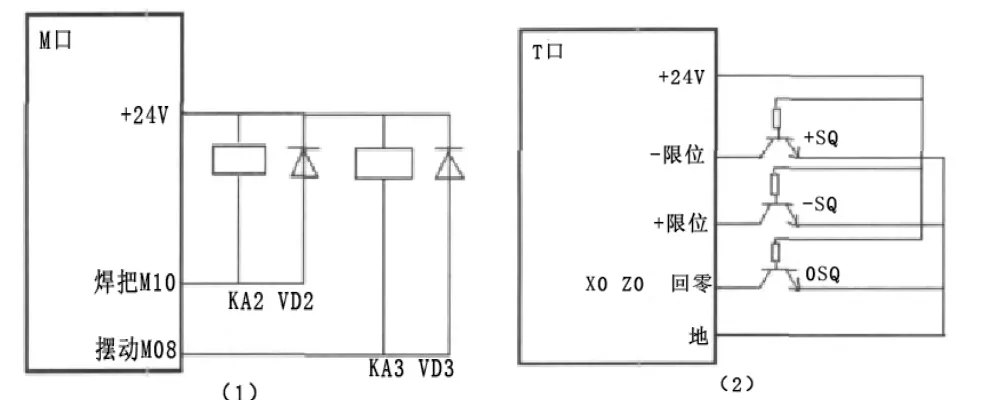

图4 数控环缝自动焊接机控制电路
4 运行程序设计
要保证设备能稳定高效运转,必须要有好的运行程序。在此以焊接2圈为例来说明焊接程序的编写,具体说明如下:P2->M08->M10->G01 W-351.0 F250->G00 U8.0->G01 W-352.0 F250->G04 P1000->M11->M09->G00 X0->G00 Z0->M02。其中:P2代表程序号;M08代表摆动启动;M10代表焊接启动;G01 W-351.0 F250表示以250mm/min的速度焊接第一圈,搭边1mm,倍率开关可以调整相关参数;G01 W-352.0 F250表示以250mm/min的速度焊接第二圈,搭边2mm;G00 U8.0表示焊枪抬起8mm;G04 P1000-表示暂停1s,采用填满弧坑方式收弧;M11停止焊接;M09摆动停止;G00 X0和G00 Z0分别表示X轴和Z轴归零;M02程序结束。
5 结语
文章设计的数控环缝自动焊接机由数控系统来控制机器的运转,采用二氧化碳气体保护焊机,操作简便、程序开放可靠,用户可以根据需要自行编辑修改,可以实现共建的多圈连续焊接,焊接速度也可根据需要进行调节,因此适用于不同宽度和深度的焊缝。总的来说,采用数控环缝自动焊接机进行焊接,可以确保焊接工作的操作简单、质量可靠、外形美观、效率高,且易操作等优点。
[1]戴寿超.环缝自动焊机步进电动机控制系统的改进设计[J].电气技术,2011,(2):50-53.
[2]郭耀泉.环缝自动焊机控制系统设计与实现[J].新乡学院学报,2013,(3):211-213.
曹永雄(1987-),男,广东湛江人,大学本科,主要研究方向:焊接数值模拟技术发展现状。
