全球卫星导航系统用于桥梁健康监测数据处理分析
2017-09-15田保慧张擎天
田保慧,张擎天,张 建
(1.河南省交通技术学院,河南 郑州 450016;2.河南北斗卫星导航平台有限公司,河南 郑州 450003)
全球卫星导航系统用于桥梁健康监测数据处理分析
田保慧1,张擎天2,张 建2
(1.河南省交通技术学院,河南 郑州 450016;2.河南北斗卫星导航平台有限公司,河南 郑州 450003)
作为桥梁健康监测的一种重要手段,全球卫星导航定位系统具有低通视要求、高自动化、短周期等明显的技术优点,可以满足实时、全天候的桥梁健康监测要求,使其成为该领域应用发展的一个热点。文章通过对比各种解算方式下的数据,旨在分析出全球卫星导航定位系统用于桥梁健康监测的不同解算模式下数据的精度与误差,为推动全球卫星导航定位系统在桥梁健康监测领域中的应用和探索略尽绵力。
桥梁;精度;全球卫星导航定位系统;健康监测;参考站
卫星导航是指采用分布太空的多颗导航卫星对覆盖区域内的用户进行导航定位的技术。全球卫星定位系统(以下简称GNSS)是指利用有多个覆盖全球的卫星组成的卫星导航系统提供的位置、速度及时间信息,对各种目标进行定位、导航及监管,目前常用的GNSS测量解算模式主要包括:静态、快速静态和动态模式三种。在大地测量、海洋测量、工程测量、勘探测量及各种类型的变形监测等领域,GNSS测量已被广泛深入使用。随着生产力的发展,作为交通咽喉的桥梁变得跨度大、结构柔,但人们对大型复杂结构认识不足、不定时或不可抗的外在因素(超负荷运营、超限服役、腐蚀、疲劳、撞击、爆炸)影响。为确保桥梁的安全运营,日常需要对桥梁进行健康监测。桥梁的健康监测是指对桥梁的主要位置和关键部位实施不间断的实时测量,来观察桥梁的承载、耐久等各项生命体征在外界环境因素(风、温度、气候等)和过往车辆与行人作用下的变化情况。目前,广泛应用于变形监测领域的全球卫星导航定位系统监测方法由于具有无需通视,全天候运行受气候条件影响小,可以进行同步观测,观测时间短,定位的结果没有误差积累,并可以快速、简便地获取监测位置的三维空间坐标,逐步成为桥梁健康监测的一个重要发展方向。因此,建立基于GNSS技术的桥梁健康监测系统从技术来讲是切实可行的。文章通过一个基于北斗卫星导航系统的桥梁健康监测项目,结合GNSS解算的原理和实践数据的分析讨论,进一步分析何种解算模式更适合桥梁健康监测系统的建设。
在花园口黄河大桥开展的基于北斗的桥梁健康与交通量运营的项目中,采用了基于北斗(BDS)的GNSS卫星定位方式来监测大桥关键部位的变形情况。其中,基准站是建立在管理处机房楼顶开阔处的屋顶站,监测点布设在大桥105跨的桥墩处,高出桥面40cm。文章通过分析采用各种监测解算方式下的监测结果,分析出桥梁GNSS监测的数据解算方式。
1 全球卫星导航定位系统桥梁健康监测分析
1.1 全球卫星导航定位系统桥梁健康监测的原理
全球卫星导航定位系统桥梁健康的基本工作原理是,在桥梁关键位置布设监测站一处或若干处,在桥梁周围地形稳固空间宽阔的位置建设一座或以上数量的基准站,进行同步观测并解算出各监测站处的三维坐标,得出大桥的某一位置在固定时刻的三维空间坐标,进而由此评估桥梁的健康状态和各种运行情况下位移变化的规律。
1.2 全球卫星导航定位系统定位数据的解算
载波相位观测值是高精度GNSS测量解算结果的精度最高的定位方式。静态定位和RTK动态定位两种测量模式都是采用载波相位观测值解算的定位技术,它们能够提供测量位置高精度的三维空间坐标。
(1)静态定位解算模式。采用载波相位观测值的相对定位模式的静态解算是目前精度最高的,该模式认为整个观测过程中接收机天线的位置是静止不动的,通过卫星观测数据的变化求解位置信息。具体是取得放置在一条或数条基线的两个端点基准站和参考站同一时段观测的卫星数据。通过基线解算和各种误差方程求取测站点间的基线向量,确定每个测站点在指定坐标系下的三维坐标,一般需要观测2个小时以上,解算精度为mm级,整个数据处理流程分为前期处理、基线解算、网平差、坐标变换等几个阶段。
(2)动态定位解算模式。Real-time Kinematic(简称RTK)定位技术是目前广泛使用的实时动态卫星定位技术,通过基准站的配合,流动站能够实时返回观测点厘米级精度的待测点的三维坐标。在RTK定位模式下,作为基准站点的三维坐标是事先获得的,流动站通过基准站发来的观测值改正数不断修正其自身的观测值快速返回测量结果。基准站通过电台、无线网络等各种形式将流动站所需信息发送至流动站。流动站不仅接收基准站发送过来的数据,其自身还接收卫星发送的数据,然后将两种来源的数据组成差分观测值进行实时解算,一秒内给出待测位置的观测结果。由于通信线路的限制,基准站和流动站间距通常在数公里内,因此可以认为两站间的各种误差来源因素存在很强的一致性,通过组成差分观测值可以消除一定量的相关误差,保证观测结果的精度。
1.3 静态定位模式
目前,各地开展的基于GPS/BDS桥梁健康监测系统主要采用这种解算方式处理观测数据,得出监测点准确位置。采用载波相位相对定位的静态模式可以达到毫米级的解算精度,有静态、准(快速)静态定位两种解算方式。常规静态测量需要观测2个小时以上,不适用于桥梁监测实时监测的设计要求,而快速定位通过快速获取整周模糊度可以短时间内解算出监测结果,花园口黄河大桥桥梁健康监测项目采用了后者进行监测数据解算方式。
快速静态定位需要设计数据处理软件处理卫星接收机观测到的原始星历、观测数据。为了保证解算结果的高精度,设计了满足以下条件的GNSS数据解算软件:
(1)删除整个观测过程中观测时间过短的卫星观测数据,不让该卫星观测数据参与相关解算过程,保证基线解算精度。
(2)关于周跳问题,可以通过删除某颗卫星周跳严重时间段的方法和删除周跳严重卫星观测值两种模式对比来提高基线解算结果的精度。
(3)对于残差较大的观测值,直接剔除不让其参与基线解算。
(4)根据观测的情况生成模型,改正对流层和电离层对卫星信号传播的延迟,提高解算精度。
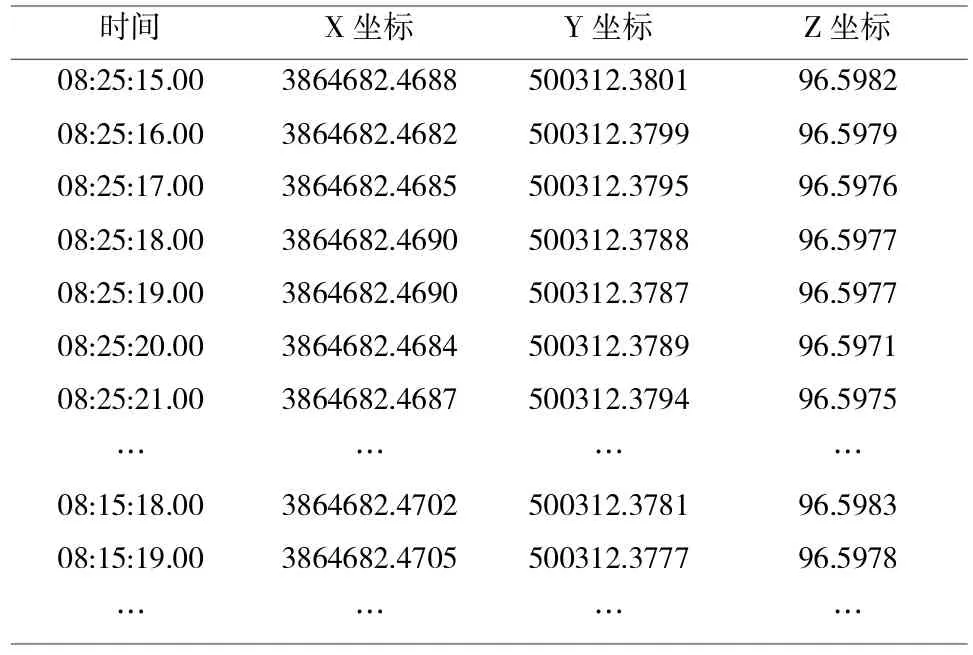
表1 截取了该软件部分的监测数据结果
通过表1可以看出,监测结果稳定性高。分析数天的观测数据,可以得知监测站点坐标极限差值整体不大于1cm。鉴于监测点布设位置为桥梁的墩柱位置,为不可能频繁出现厘米级的震颤、变形的部位,所以可以认定监测数据结果符合桥梁监测点位置的实际情况。再连续观测数天后,统计分析所有天观测的解算数据,通过数学计算得出数据以一个固定坐标为中心形成正态分布,从而说明了监测处坐标细微变化的根源系GNSS测量过程中的偶然误差。通过以上分析,可以看出快速静态定位可以用于桥梁的健康监测,并能够获取准确、可靠的监测结果。
1.4 RTK动态定位模式
为了探索RTK动态定位的解算模式能否用于变形监测领域,通过更改监测站接收机输出设置,设置监测站接收机的解算模式为RTK观测模式。在RTK模式下,分别进行了接入自建基准站和接入“河南北斗地基增强系统”两种基站模式进行监测。开展了一段时间的监测后,统计分析各种方式的相关数据。截取部分的观测值数据,如表2所示。
通过表2数据可以看出数据值浮动很大,通过分析对比所有监测天数的监测解算数据,得出以下4点结论:①通过RTK模式解算的数据其结果的稳定性差,结果的差异无明显规律;②但是在一些特殊的情景下其数据解算结果又趋于稳定且靠拢静态模式下解算的结果值;③自建基准和北斗地基增强系统两种模式,在观测过程中都出现了几次卫星失锁导致接收机重新初始化的现象,但是北斗地基增强系统模式下出现的次数要少一些;④同比测试下对比自建基站和地基增强系统站两种模式下的数据,接入地基增强系统的观测结果优异于基准站模式的观测结果。
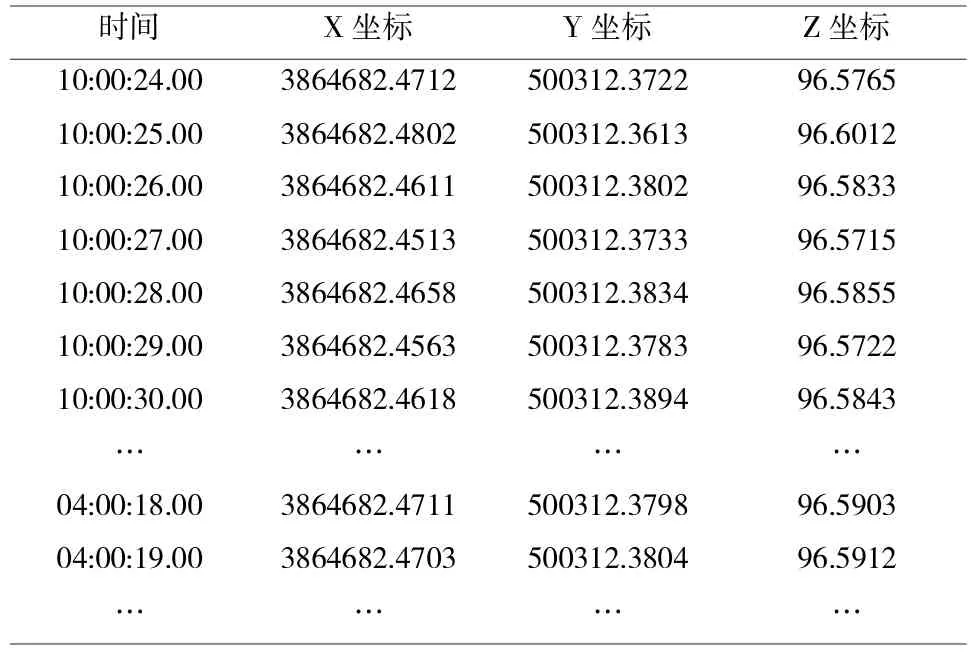
表2 截取部分的观测值数据
通过对几天的观测数据进行统计分析可得出结论:RTK动态解算模式的观测结果的分布无法用正态分布表示,明显存在一定的系统误差。因而虽然目前动态RTK模式可以达到1cm+1ppm的测量精度,但是由于桥梁变形监测的特殊要求,尚不能作为GNSS桥梁变形监测的数据解算手段。
1.5 两种解算模式的对比分析
GNSS测量结果的主要误差有以下四个来源:①导航卫星系统的卫星钟差和卫星轨道偏差等相关误差;②电流层、对流程、多路径效应对卫星信号传播影响产生的误差;③接收机设备的钟差及天线相位中心、观测误差、整周未知数等因素形成的误差;④其它外界因素。其中各种硬件设备的钟差如卫星钟差和接收机钟差,对两种模式观测结果的影响可以认定为一致的,而电流层、对流层、多路径的误差影响忽略观测时段不同的影响基本也应一致。造成两种解算模式不同的原因应在于外界因素影响以及其对监测点接收机天线相位中心和观测时段长短对整周模糊度的影响。
造成RTK监测结果难以稳定固定值1cm范围内的主要误差来源为:①由于参考站布设在桥面之上,通行车辆带动的空气使仪器发生轻微振动,RTK模式下振动使天线相位中心无法固定一个点,从而使接收机解算出不同的固定解。②由于黄河大桥的高度,导致桥面以上的高度风力大于普通路面高度的风力,对仪器的稳定造成影响,该种影响和上一个影响相同。③天空卫星分布的影响,天气恶劣情况下会导致无法正常差分解算,从而仪器要重新进行初始化,影响了观测的连续性。④由于RTK模式下,基准站需要向监测站发送差分数据作为监测点结算的一部分,所以基准站的接收机和发送数据的精度对移动站的解算有一定影响。
而选择河南北斗地基增强系统(连续运行参考站系统)的网络RTK模式优异于自建基站的普通RTK模式,其主要原因在于:①网络RTK模式下,虚拟基站和监测站之间的基线距离可以更短,从而消除卫星系统相关的误差更有效明显;②在传播误差方面,网络RTK可以以整个参考系统的电离层、对流层模型修正监测站的数据,而普通RTK只能通过基准站和监测站两个站建立模型,所以相对而言,前者的模型更复杂更准确有效;③在整周未知数方面,众所周知,网络RTK的解算周期更短,能够更快得到固定解,从而更有优势;④网型优势,网络RTK组成的网络形状更加复杂,能够利用单基线、多基线等来解算基线,从而能通过软件来处理得出更优的情况。
2 结论
通过对黄河公路大桥桥梁健康监测项目的监测数据进行分析可知,虽然全球卫星导航定位技术在桥梁监测领域有很大的应用潜力,但由于其仍受一定外界因素的干扰和各种解算模式的局限性,导致其在变形监测领域内的价值受到一定的影响。在监测过程中,如何选择数据的处理对整个监测结果起着至关重要的作用。静态相对定位技术虽然有较高的精度,但是其观测时间较长,所以无法应用于对观测时段要求高的项目;RTK模式不论是网络型RTK还是普通模式的RTK,由于受到其误差来源与自身精度的影响,难以适用于观测环境差精度要求高的项目;而快速定位模式,可以较快的解算出整周模糊度并具有很高的解算精度,可以作为桥梁GNSS监测的数据处理方式。
综上所述,可以得出如下结论:①全球卫星导航定位系统测量结果的精度受到天空中卫星分布姿态和卫星信号传播的制约,可以通过使用三星八频的高端接收机组合四大全球卫星导航定位系统的卫星,选取最优观测结果进行组合解算消除部分误差的影响。②RTK实时动态相对定位技术,虽然能够方便快捷的得到1cm级的定位精度,但是由于易受外界因素如风力、温度和大桥通行人车的不良影响,无法精确消除这类影响带来的误差,想通过RTK定位技术进行桥梁位移监测还有待各方面技术的发展。③全球卫星导航定位系统快速静态定位技术配合先进的解算算法能够在短时间内输出达到毫米级的定位精度观测值,其精度符合桥梁健康监测对观测精度的要求,能作为桥梁位移测量的一种技术手段。④北斗地基增强系统作为基准站的网络RTK模式一定程度上优异于自建基准站的普通RTK模式的数据精度,可以作为未来探索的一个方向。
[1]余加勇,邵旭东,晏班夫,等.基于全球导航卫星系统的桥梁健康监测方法的研究进展[J].中国公路学报,2016,(4).
[2]王文贯,陆海波.单、双频GPS数据联合处理基线分析[J].水利规划与设计,2010,(4).
[3]石金峰,李新慧,杨培章.RTK技术及其在控制测量中的应用[J].辽宁工程技术大学学报,2004,(6):737-739.
[4]张随甲,周晓忠.GPS-RTK误差来源及减弱误差的实用方法[J].交通科技与经济,2014,(2).
田保慧(1975-),河南商水人,硕士,副教授,主要从事智能交通研究工作。
