蛋胚成活性分拣机器人真空吸盘装置设计与试验
2017-09-15刘衍聪中国石油大学华东机电工程学院青岛266580滨州学院电气工程学院滨州256600
黄 超,刘衍聪,伊 鹏(. 中国石油大学(华东)机电工程学院,青岛 266580;2. 滨州学院电气工程学院,滨州 256600)
蛋胚成活性分拣机器人真空吸盘装置设计与试验
黄 超1,2,刘衍聪1※,伊 鹏1
(1. 中国石油大学(华东)机电工程学院,青岛 266580;2. 滨州学院电气工程学院,滨州 256600)
为解决168枚蛋盘自动分拣装置在分拣过程中,存在蛋胚跌落、胚浆吸出等问题,结合国内外现有蛋胚分拣技术,以负压控制灵活的真空发生器为核心,设计一种具有独立负压控制回路的真空吸盘装置。通过对蛋胚吸持过程的气流场分析,采用蛋胚与吸盘无接触时的悬浮力和接触时的负压吸力对比分析,优化吸盘缓冲机构,降低了吸持负压要求。对负压控制回路的真空发生器、储能器、吸盘、气管等器件进行性能试验和连接优化设计,构成具有168路独立的负压回路的真空吸盘装置。按照分析和设计制作样机,进行蛋胚分拣试验和负压系统的供压性能验证,每路独立负压回路,实现了稳定低压供应,降低了耗气量,在负压为-20 kPa时,胚蛋可靠吸持率为99.89%,无跌落和胚浆吸出现象,为类似分拣设计提供数据参考。
疫苗;分拣;机器;改进;蛋胚负压系统;真空吸盘;真空发生器
0 引 言
“鸡胚法”是生物疫苗制造业的主要生产方式,即将毒种注入鸡胚(蛋胚)中,使毒种伴随鸡胚的发育自然繁殖,鸡胚继续发育3 d左右,每枚大约含有8~12 mL的半成品抗原[1-2]。蛋胚孵化培养9~11 d后,向蛋胚注射毒种(俗称接种)。接种后继续孵化2~3 d,进行尿囊液提取(俗称收获)。在流感疫苗接种和收获前,均需要对蛋胚进行成活性检测,同时剔除死胚和弱胚蛋,即是蛋胚分拣。
蛋胚成活性自动检测、自动分拣以及蛋盘自动装卸机械手,成为疫苗制造行业不可或缺的蛋胚自动检测分拣成套设备。法国、美国、荷兰等国家已实现蛋胚成活性自动识别和分拣,其设备主要包含蛋盘自动装卸机构、蛋胚成活性识别部分、蛋胚自动分拣部分。国外设备的识别部分,一次完成42枚蛋胚的识别,因此分拣机构也完成42枚蛋胚分拣。国内蛋胚成活性识别研究有单宝明实现的单枚图像识别方法,徐彦伟等实现的单枚多信息融合识别技术,电子科技集团41所采用42枚胚蛋识别方式已产品化[3-6]。为了匹配胚蛋识别速度,提高胚蛋分拣效率,本文设计一种单次分拣168枚分拣装置。
以42枚蛋胚分拣的真空泵提供负压方式,采用扩展方式用于168枚蛋盘分拣。在试验测试时,出现漏捡、跌落和胚浆吸出现象。通过对供气管线的负压检测,发现存在的问题主要有:负压管路增多,负压管线增长造成管路之间的负压不均,导致分拣时蛋胚吸出胚浆,蛋胚吸持不住、或者分拣盘移动时蛋胚跌落等分拣问题。为解决上述问题,设计以真空发生器为核心的蛋胚成活性分拣机器人真空吸盘装置。
1 蛋胚分拣机器人吸盘装置
1.1 蛋胚分拣执行结构
真空吸盘装置是蛋胚成活性分拣机器人的重要组成部分,真空吸盘装置完成蛋胚的吸持、移位、落盘的功能。装置由气动控制系统和蛋胚分拣执行机构2部分组成。气动控制系统由蓄能器、真空发生器、电磁换向阀、真空吸盘和管线构成,完成蛋胚的吸持。蛋胚分拣执行机构主要由分拣支架、4个平行升降气缸、同步带传动模组、传动带、分拣盘组成,完成蛋胚的移位,如图1所示。
蛋胚分拣执行机构,是驱动分拣盘完成蛋胚分拣的自动装置。蛋盘在传送带的带动下,定位至真空分拣盘下方。4个平行气缸驱动真空分拣盘下降,吸盘和待分拣蛋胚耦合、吸持,气缸缩回带动分拣盘上升,在同步带传动模组的驱动下,真空分拣盘定位至蛋胚回收处,将蛋胚落盘,周而复始完成蛋胚的分拣[7-11]。分拣盘吸持蛋胚在同步带传动模组的驱动下,沿导轨实现一个匀加减速和匀速的平动。兼顾分拣效率与分拣装置的平稳性,控制系统驱动分拣盘在启停时的惯性不足以引起分拣装置的晃动,经试验测试确定匀加减速的时间是300 ms,匀速是1 m/s,因此分拣盘吸持蛋胚径向加减速度为
3.3 m/s2。升降部分采用气缸,调整气缸的节流阀,控制气缸的加减速度为6.4 m/s2。

图1 蛋胚分拣执行机构Fig.1 Egg embryo sorting actuating mechanism
1.2 蛋胚分拣气动系统
蛋胚分拣气动系统的4个平行升降气缸,是蛋胚分拣执行机构的一部分,完成蛋胚分拣盘的升降功能。气动系统的主要功能是产生负压,驱动吸盘吸持蛋胚。为解决168枚分拣的负压回路增加,导致负压不均的问题,采用真空发生器产生负压,实现独立回路负压控制方式,解决回路之间的相互影响,负压系统采用空气压缩机和真空发生器产生负压,替代真空泵提供负压方式。负压气动回路由空气压缩机、储能器、电磁换向阀、节流阀、真空发生器、管线和真空吸盘组成,每一路真空吸盘均有独立的电磁换向阀控制通断,实现168枚蛋盘每个蛋位的独立控制,达到任意蛋位分拣的目的。负压气动回路如图2所示。

图2 蛋胚分拣气动系统Fig.2 Pneumatic system of egg embryo sorting
蛋胚分拣负压系统由168路独立负压回路组成,每路蛋胚吸持能力受储能器的高压气体供给能力,真空发生器的负压特性,吸盘的吸持能力,连接管线的响应能力的影响。参考待分拣蛋胚的质量,确定蛋胚吸持临界负压,以此为设计依据,对以上4个方面进行分析、试验、设计。
2 蛋胚分拣机器人吸盘装置关键部件及参数
2.1 蛋胚吸持负压值的确定及缓冲改进
在蛋胚和吸盘气流场组成的气固两相流体系统中,当吸盘接近蛋胚时,蛋胚在吸盘附近会与气流场产生复杂的相互耦合作用,在吸盘较远处,蛋胚对吸盘气流的影响较小,此时可以忽略气流场与蛋胚之间的相互耦合作用。蛋胚受到吸盘口垂直向上的气流作用,蛋胚受到的力有向上的绕流阻力R(N)、浮力F(N)和向下的重力G(N)。假设蛋胚为球形,则根据流体力学知识得[12-16]

式中Cd为阻尼系数,其与蛋胚形状、表面状态和雷诺数有关,阻尼系数参照三维旋转椭球体长短轴比例小于2∶1时,层流Cd阻尼系数为0.27[17-20];ρ为空气的密度,标准状况(25 ℃,101 kPa)下为1.169 kg/m3;ds为胚蛋的半径,m(测试100枚胚蛋的平均直径为42 mm,测试时胚蛋的大头向上);vt为作用在蛋胚上的气流速度,m/s。
对于球型胚蛋浮力
式中sρ为蛋胚的密度,蛋胚的平均密度为1 100 kg/m3。m为蛋胚的质量(kg);

式(1)、(2)和(3)代入式(4)可得吸起球型蛋胚的临界气流速度为
当吸盘的气流速度大于胚蛋吸起临界气流速度时,胚蛋克服重力的阻碍,当距离吸孔某处气流速度大于蛋胚临界气流速度时,蛋胚即开始被吸起,随着被吸起的蛋胚越来越接近吸孔,吸孔处气流场与蛋胚之间将产生复杂的耦合作用,蛋胚加速运动至吸盘口上,此时由吸盘内部静负压提供吸力平衡蛋胚的重力。
由于蛋胚是不规则的球形,因此随着蛋胚在气流方向上投影面积的变化,受到的绕流阻力R也不断变化,所以对于蛋胚,临界气流速度为一个范围值。蛋胚悬浮临界气流速度通过试验测得为10~12 m/s,按照吸盘入口处气流速度为12 m/s,进行胚蛋吸持试验发现。分拣接种前的蛋胚,不存在吸力不足胚蛋跌落,而在分拣入库胚蛋(接种后的蛋胚),发现有胚浆被吸出现象(因接种后蛋胚气室处留有针孔)。
蛋胚吸起时,蛋胚与吸盘存在接触和非接触2种情况,当蛋胚与吸盘非接触时,是高速气流对蛋胚向上的绕阻力将蛋胚吸起,需要大负压。当蛋胚与吸盘接触时,是吸盘内外压力差将蛋胚吸起,需求负压小。若存在这2种情况,选取大负压,蛋胚吸持后,蛋胚内的压力大于吸盘内的压力,胚浆流出。为了解决这一现象,需要在吸持前,每枚蛋胚都能与吸盘接触,降低系统负压。分拣盘安装吸盘后,如图3a吸盘的高度一致,蛋盘与分拣盘平行,每个蛋位到对应的吸盘高度一样。由于蛋胚大小不一,分拣时,部分蛋胚与吸盘非接触。因此优化吸盘安装方式,采用图3b的安装方式,蛋胚的高度不一,由缓冲杆来弥补,在分拣时,每枚蛋胚均能与吸盘接触,极大地降低了气动系统的负压值。
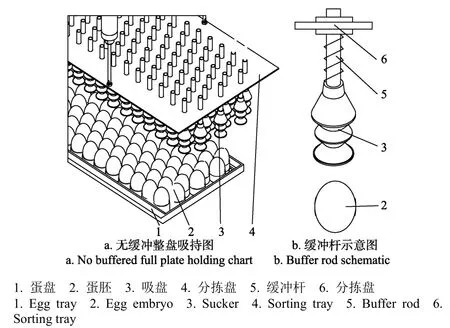
图3 吸盘安装机构示意图Fig.3 Schematic diagram of sucker mounting mechanism
改进吸盘吸持方式后,吸盘需要产生的吸力为
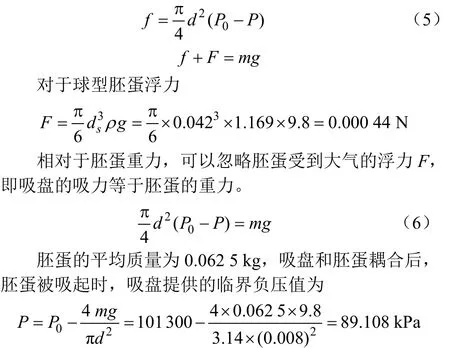
式中d为吸盘的有效内径(m);P0为环境大气压力(101.3 kPa);P为吸盘入口区域的气体平均压力(Pa);g为重力加速度(9.8 m/s2)。即采用缓冲杆吸持胚蛋时,需要的负压值为P-P0=89.108- 101.3=-12.192 kPa。
2.2 真空发生器的特性分析及选择
空气压缩机产生的高压气体,经电磁换向阀,直连真空发生器,避免由于连接气管的气体喘流带来的压降。依据分拣执行机构的控制特性,蛋胚在分拣过程中受到的轴向加速度为6.4 m/s2,径向加速度为3.3 m/s2。因此吸盘不仅需要提供克服蛋胚重力的吸力,还需提供克服蛋胚加速运动的吸力,克服加速轴向最小力吸力为0.062 5× 6.4=0.4 N,径向最小吸力为0.062 5×3.3=0.2 N。轴向吸力需同时克服蛋胚重力0.062 5×9.8=0.61 N,因此吸盘需要负压值为-12.192×(1+6.4/9.8)=-19.8 kPa,真空发生器的型号选择需满足蛋胚吸持所需负压值。电磁换向阀采用德力西4V210-08,真空发生器采用德力西CV-15HS,空气压缩机采用5 L的捷顺JS3001,对真空发生器的供气压力与负压关系进行试验,将真空发生器负压端连接吸盘,通过给真空发生器提供压力为100~700 kPa的高压气体,在真空发生器的负压端连接压力表,测试吸盘开口和耦合蛋胚时真空发生器负压端的压力值。试验结果如图4所示。吸盘与蛋胚耦合时的最大负压为-58 kPa,吸盘开口时的最大负压为-47 kPa,负压值均大于蛋胚吸持所需压力-12.192 kPa。蛋胚与吸盘紧密接触,所需吸持负压值为-12.192 kPa。由于蛋胚表面斑点、黏着污物的影响,吸盘与蛋胚之间存在缝隙,降低了吸盘的吸力,为了安全吸持,将吸持负压提高至-20 kPa。由图4所示真空发生器在吸盘开口、吸持蛋胚时,只要供气压力大于240 kPa,产生的负压大于-20 kPa,满足蛋胚吸持压力,因此蓄能器的供气压力不能小于240 kPa。

图4 真空发生器吸持特性Fig. 4 Vacuum generator suction characteristics
2.3 吸盘选择及吸持力影响分析
吸盘的形状及尺寸,决定了蛋胚在吸持转移过程的可靠性。蛋胚的吸持不仅与负压值有关,还与吸盘与蛋胚的耦合情况有关。蛋胚分拣过程分为蛋胚垂直吸持和水平移动,因此吸持综合力包含了蛋胚的垂直吸力和径向力[21-26]。垂直吸力主要克服胚蛋的自重和吸盘变形的反作用力,径向力主要克服吸盘水平运动时的加减加速度带来的冲击。
试验采用2种吸盘进行,吸盘选取能够耦合蛋胚的气室,蛋胚的气室最大截面直径宜为30~35 mm,因此选择吸盘1为最小孔径为12 mm、耦合吸盘外径34 mm,吸盘2为最小孔径为15 mm、耦合吸盘外径为30 mm。在负压值为-20 kPa,分别测试胚蛋吸持时,所能承受的最大轴向力和最大径向力。挑拣大小不同的胚蛋30枚,在同一个吸盘控制位,采取更换吸盘的方式进行试验,试验测得轴向力和径向力如图5所示。
经试验测试吸盘1的最小轴向吸持力为1.12 N,最小径向吸持力为0.22 N。吸盘2的最小轴向吸持力为1.72 N,最小径向吸持力为0.15 N。综合轴向和径向吸持力需求,选择吸盘1。
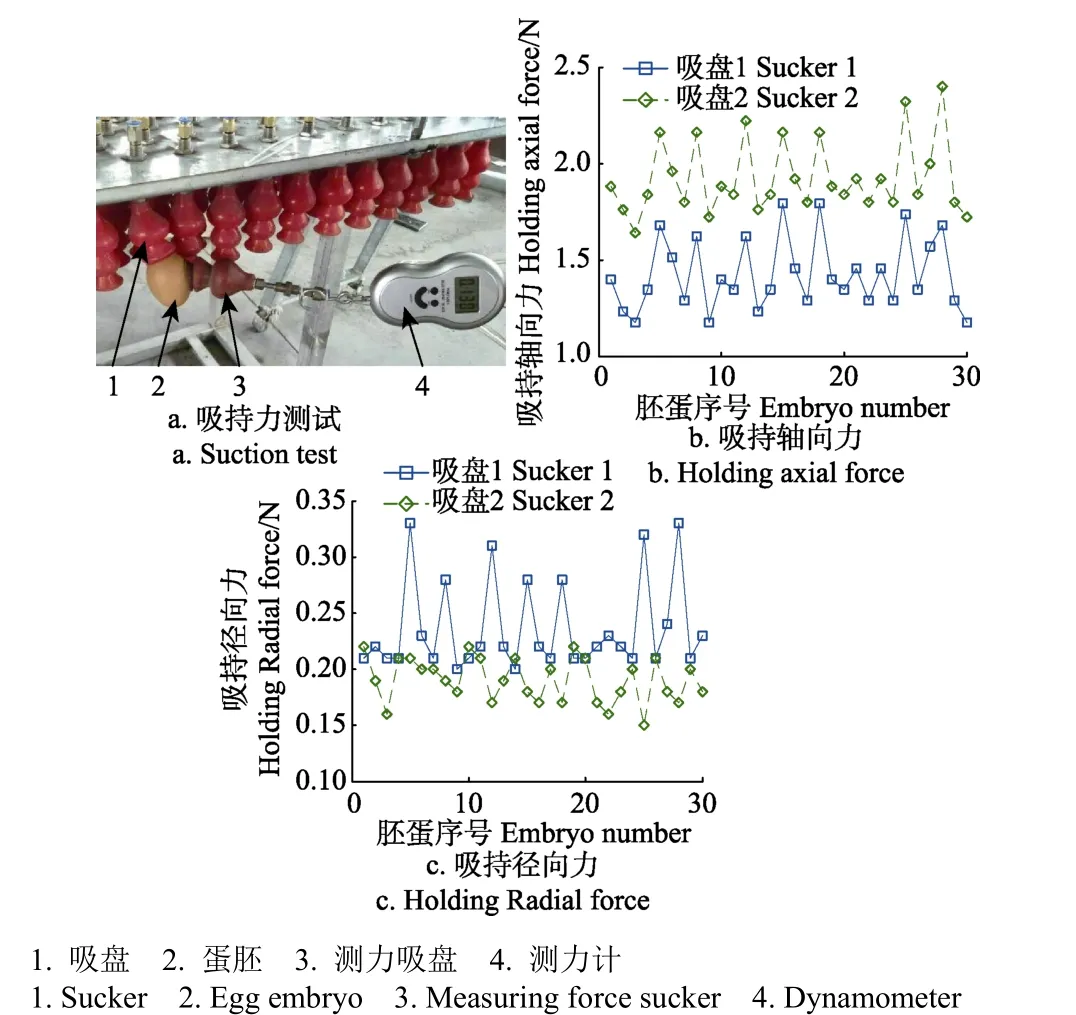
图5 不同吸盘的吸力特性Fig.5 Suction characteristic of different sucker
2.4 储能器的容积设计
蛋胚分拣过程中,真空发生器需要提供持续的负压,因此要求储能器能够提供足够流量的高压气体。储能器容积设计,按照气体能量守恒方程进行计算。电磁换向阀启动后,压力管道内容积为V1、初始压力为P1的气体,与储气罐内容积为V2、压力为P2的气体相互扩散混合,若平衡后的压力达到启动压力P,则可求得储能器容积

蛋胚分拣时,需要负压不小于-20 kPa,参照图6真空发生器的负压与流量关系,在负压值为-20 kPa时,所需高压气体的流量为45 L/min,蛋胚吸持等待时间、气缸上升时间、分拣盘在同步带传动模组驱动下行走1.3 m耗时之和t=3.5 s。由图4真空发生器的特性知,蛋胚可靠吸持负压为-20 kPa时,真空发生器的供气压力应为0.24 MPa,与厂家提供的参考供气压力0.4 MPa进行耗气量对比试验。由测试真空发生器的参数知,当真空发生器产生-20 kPa压力时,真空发生器的耗气量为45 L/min,胚蛋从吸持到分拣完成耗时t=3.5 s,因此一路吸盘完成一个分拣循环,需要2.625 L的高压气体,即蓄能器的容量不能小于441 L。

图6 真空发生器供气量与负压特性Fig.6 Characteristics of vacuum generator air supply and negative pressure
2.5 气管长度与吸持响应时间的关系试验分析
气管越短,真空吸盘越能够快速吸持蛋胚,减少分拣盘等待时间,提高分拣效率。同时吸盘将胚蛋放回回收框时,电磁换向阀动作,切断真空发生器的高压进气,使得负压腔压力升高,大于胚蛋吸持的临界负压,胚蛋落下。由于待分拣蛋盘的宽度为500 mm,考虑蛋盘传送机构的边沿,吸盘固定板需要水平移动600 mm。如果将真空发生器固定在吸盘固定板上,将增加其转动惯量,降低其灵活性,增加设备功耗。为了兼顾吸盘的动态响应特性和整机的效率,将真空发生器固定在桁架的中上方,抽气管的长度约为600 mm。
因此需要对气管长度与吸持响应时间进行试验,启动空气压缩机,达到额定气压时,启动电磁换向阀,对真空发生器供高压气体,使得真空发生器能够提供稳定负压。为了精确测量气管长度对吸盘响应时间的影响,在真空发生器与吸盘气管之间设有直通电磁阀,当直通电磁阀开启时,气管开始进入负压,使得吸盘吸持胚蛋。调整真空吸盘与胚蛋耦合、更换不同长度的气管,测试对同一个胚蛋吸持的响应时间。试验采用CANEN750D相机拍摄,依据播放帧数确定吸持响应时间。控制系统同时控制直通换向阀和相机,作为计时的起点,当三层硅胶吸盘,吸起胚蛋脱离蛋盘至最高位置时为时间结束点。图7为气管长度与吸持响应时间的关系,在管线在600 mm长时,响应时间为10 ms,负压系统的最长管线为600 mm,因此分拣盘下降吸持蛋胚的等待时间不能低于10 ms。
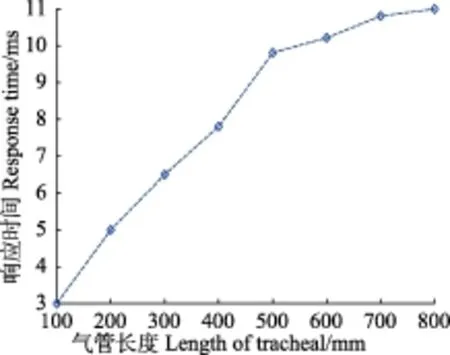
图7 气管长度与吸持响应特性(负压0.025 MPa)Fig.7 Characteristics of tracheal length and suction response (Negative pressure of 0.025 MPa)
3 胚蛋分拣试验
为了验证分拣机器人真空吸盘装置的有效性和可靠性,采用多种模式分拣测试。2017年3月分拣试验在某生物疫苗厂的照蛋间进行为期7 d的性能测试,验证负压系统负压值选取的合理性。依据最大待分拣率50%,人工挑选待分拣蛋胚随机放置蛋盘中,分别按照-15、-20、-25 kPa的负压值分拣80盘蛋胚,验证不同情况下的分拣性能。当分拣机构接收分拣信息后,步进电机驱动机构带动分拣盘[27-30],定位至蛋位上方。吸盘下压胚蛋,真空吸盘发生微形变,使得吸盘和胚蛋有效耦合。按照待分拣蛋位信息,打开对应蛋位的直动式电磁换向阀,使得真空发生器工作,产生负压吸起胚蛋。升降联动气缸抬起吸盘后,在步进电机驱动机构的带动下平移至回收框上方,将胚蛋放下。真空吸盘装置测试如图8a所示。
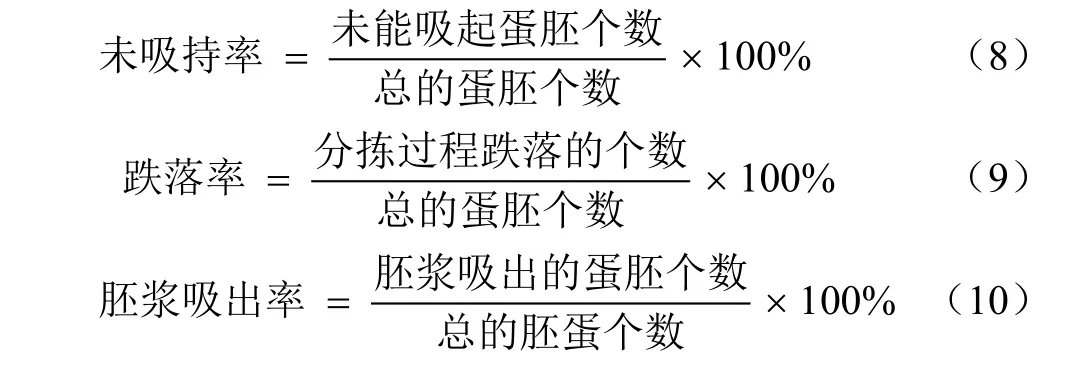
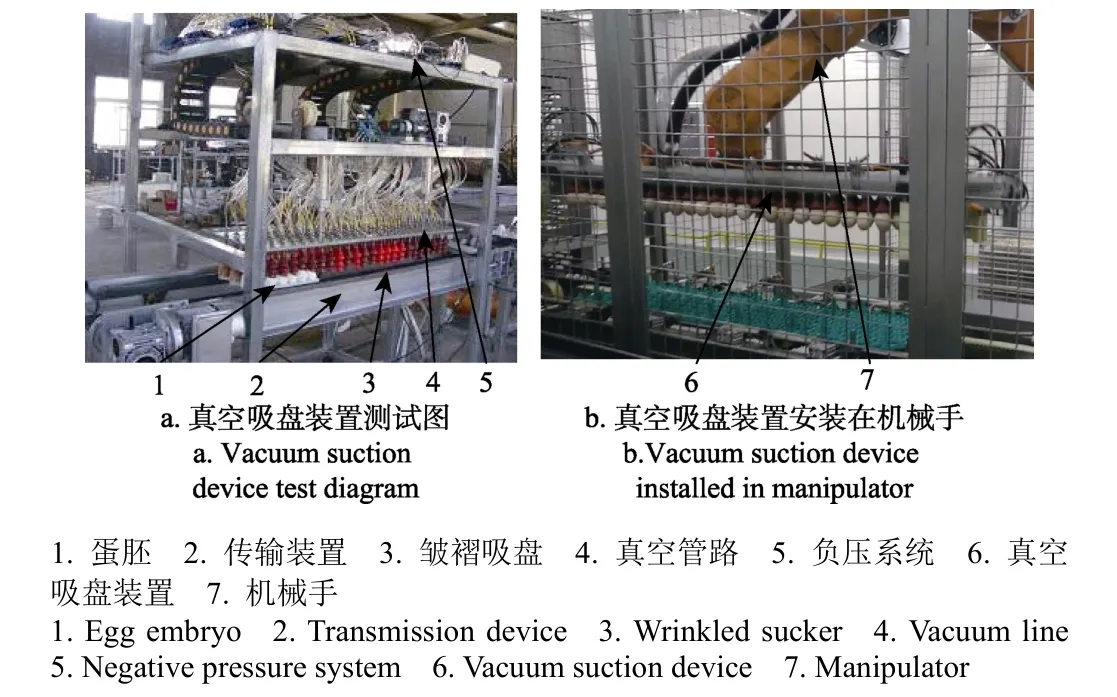
图8 真空吸盘装置测试及应用Fig.8 Testing and application of vacuum suction device
试验结果表明(表1),在负压为-15 kPa时,无胚浆吸出,但蛋胚跌落率较高;负压为-25 kPa时,无蛋胚跌落,但胚浆吸出率较高;负压为-20 kPa时,无蛋胚跌落,胚浆吸出率低。因此蛋胚分拣负压值设置为-20 kPa,蛋胚分拣成功率99.89%,胚蛋吸持中跌落率为0,满足蛋胚分拣的需求,与理论计算值接近。采用储能器集中供高压,真空发生器独立控制方式,缩短了负压回路长度,有效解决了真空腔的压力不均,所导致的胚蛋吸力不足而跌落和负压过大吸出胚浆的现象。每个蛋位吸盘采用缓冲机构,有效解决了因蛋胚高度不一带来的吸盘与蛋胚耦合问题。经试验,真空分拣装置的蛋胚分拣性能满足高效可靠蛋胚分拣要求。同时将该装置安装在6自由度机械人上如图8b所示,用于错位分拣。分拣机器人真空吸盘装置,替代了人工分拣,结合识别机构,实现了蛋胚检测和分拣的自动化,提高了胚蛋的分拣效率。
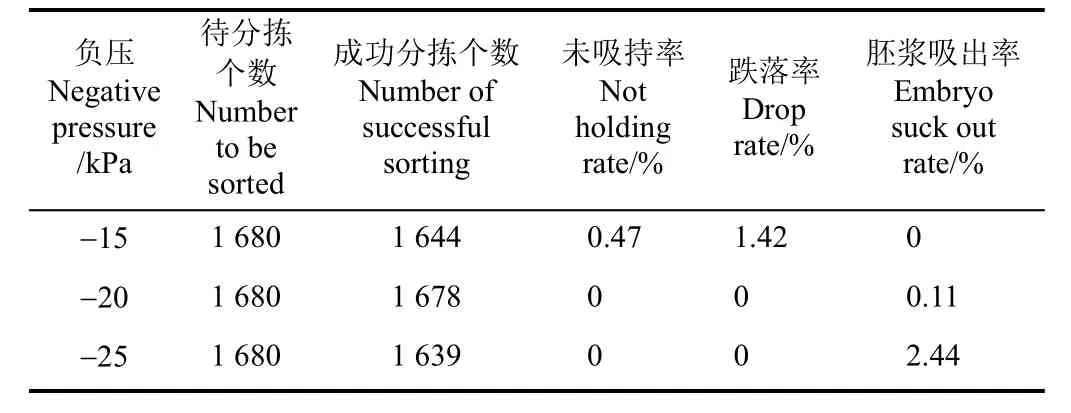
表1 接种蛋胚分拣测试结果Table 1 Inoculated egg embryo sorting test results
4 结 论
1)采用高压储能器驱动真空发生器提供负压,每个吸盘独立负压回路控制,解决了集中负压式带来的压力不均,避免了胚蛋吸持时的跌落和无法吸持现象。
2)通过对气管的动态响应性、真空发生器性能、吸盘形状、储能器容积等影响负压回路供压因素分析,优化了负压回路,采用皱褶式吸盘和吸盘缓冲杆,使吸盘和蛋胚在吸持前,能够很好地耦合,降低了蛋胚吸持负压值,解决了蛋胚吸持时的胚浆吸出问题,也提高了系统的动态响应性。
3)蛋胚成活性分拣机器人真空吸盘装置接收待分拣蛋位信息,完成蛋胚定位、吸持、落盘整个分拣过程中,在负压为-20 kPa时,蛋胚分拣成功率99.89%,胚蛋吸持中跌落率为0,胚浆吸出率极低,满足生产需求。
[1] 闫峰,张辉. 孵化温湿度对鸡胚尿囊液的影响[J]. 中国兽医杂志,2011,47(1):28-30. Yan Feng, Zhang Hui. The incubation temperature and humidity effects on chicken embryo allantoic fluid[J]. Chinese Journal of Veterinary Medicine, 2011, 47(1): 28-30. (in Chinese with English abstract)
[2] 张彦杰,贾玲霞,李爱芬,等. 禽流感H9亚型SD696株疫苗生产工艺改进试验[J]. 中国兽药杂志,2011,45(1):45-48. Zhang Yanjie, Jia Lingxia, Li Aifen, et al. Experiment of improve technological processon avian influen za virus(H9) strain SD696 vaccine production[J]. Chinese Journal of Veterinary Medicine, 2011, 45(1): 45-48. (in Chinese with English abstract)
[3] 单宝明. 基于机器视觉的疫苗制备中胚蛋成活性检测[J].农业机械学报,2010,41(5):178-203. Shan Baoming. Hatching egg fertility detection in vaccine preparation based on machine vision[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(5): 178-203. (in Chinese with English abstract)
[4] 刘川来,呼进国. 疫苗制造中接毒SPF胚蛋成活性无损检测系统[J]. 中国科技论文,2013,8(7):711-716. Liu Chuanlai, Hu Jinguo. Non-destruxtive detection of the survival of inoculated SPF eggs in vaccine production[J]. China Science Paper, 2013, 8(7): 711-716. (in Chinese with English abstract)
[5] 杨简,石莹,刘海燕,等. 基于DSP和模糊神经网络种蛋识别系统[J]. 中国农机化学报,2014,35(5):175-178. Yang Jian, Shi Ying, Liu Haiyan, et al. Unfertilized eggs verification system based on DSP system and fuzzy neural networks [J]. Journal of Chinese Agricultural Mechanization, 2014, 35(5): 175-178. (in Chinese with English abstract)
[6] 徐彦伟,徐爱军,颉潭成,等. 基于多信息融合的疫苗制备中鸡蛋胚体分拣系统[J]. 农业机械学报,2015,46(2):20-26. Xu Yanwei, Xu Aijun, Xie Tancheng, et al. Automatic sorting system of egg embryo in biological vaccines production based on multi-information fusion[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(2): 20-26. (in Chinese with English abstract)
[7] 刘立晶,刘忠军,杨学军,等. 气流输送式小麦免耕播种机设计和试验[J]. 农业机械学报,2011,42(2):54-57.Liu Lijing, Liu Zhongjun, Yang Xuejun, et al. Design and test on pneumatic no-till wheat planter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(2): 54-57. (in Chinese with English abstract)
[8] 秦红斌,张吉鑫,陈国良,等. 一种新型真空吸盘装置[J].真空科学与技术学报,2017,37(1):12-16. Qin Hongbin, Zhan Jixin, Chen Guoliang. Design optimization of vacuum sucker for high precision flexible assembly fixture of autoglass[J]. Chinese Journal of Vacuum Science and Technology, 2017, 37(1): 12-16. (in Chinese with English abstract)
[9] 韩志,谢晶,潘迎捷,等. 食品冷却抽真空过程流场影响参数分析[J]. 农业机械学报,2010,41(9):118-121. Han Zhi, Xie Jing, Pan Yingjie, et al. Parameters analysis on flow performance in food vaccuum izing process[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(9): 118-121. (in Chinese with English abstract)
[10] 赵佳乐,贾洪雷,姜鑫铭,等. 大豆播种机偏置双圆盘气吸式排种器[J]. 农业机械学报,2013,44(8):78-83. Zhao Jiale, Jia Honglei, Jiang Xinming, et al. Suction type offset double disc seed metering device of soybean seeder[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(8): 78-83. (in Chinese with English abstract)
[11] 胡小静,颉潭成,毛恒轩,等. 自动分拣鸡蛋平台气动系统研究[J]. 机床与液压,2014,42(2):68-70. Hu Xiaojing, Xie Tancheng, Mao Hengxuan, et al. Research on pneumatic system of automatic sorting eggs platform[J]. Machine Tool&Hydraulics, 2014, 42(2): 68-70. (in Chinese with English abstract)
[12] 赵立新,郑立允,王玉果,等. 振动气吸式穴盘播种机的吸种性能研究[J]. 农业工程学报,2003,19(4):122-125. Zhao Lixin, Zheng Liyun, Wang Yuguo, et al. Seed suction performance of vibrational air-suction tray seeder [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2003, 19(4):122-125. (in Chinese with English abstract)
[13] 孙文策. 工程流体力学[M]. 大连:大连理工大学出版社,2007.
[14] Meng Deyuan, Tao Guoliang, Ban Wei, et al. Adaptive robust output force tracking control of pneumatic cylinder while maximizing/minimizing its stiffness[J]. Journal of Central South University, 2013, 20(6): 1510-1518.
[15] 齐龙,谭祖庭,马旭,等. 气动振动式匀种装置工作参数的优化及试验[J]. 吉林大学学报工学版,2014,44(6):1684-1690. Qi Long, Tan Zuting, Ma Xu, et al. Optimization and test of operational parameters of pneumatic vibration uniform-seeds device[J]. Journal of Jilin University Engineering and Technology Edition, 2014, 44(6): 1684-1690. (in Chinese with English abstract)
[16] 黄卫星. 工程流体力学[M]. 北京:化学工业出版社,2010. [17] 杨洲,陈朝海,段洁利,等. 荔枝压差预冷包装箱内气流场模拟与试验[J]. 农业机械学报,2012,43(10):215-217. Yang Zhou, Chen Chaohai, Duan Jieli, et al. Simulation and experiment of airflow field in cartons of pressure-difference pre-cooling for litchi[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(10): 215-217. (in Chinese with English abstract)
[18] 焦洋洋,刘强,王素娟. 真空夹具系统的设计[J]. 真空科学与技术学报,2014,34(3):225-229. Jiao Yangyang, Liu Qiang, Wang Sujuan. Novel type of fixture clamping by negative pressure[J]. Chinese Journal of Vacuum Science and Technology, 2014, 34(3): 225-229. (in Chinese with English abstract)
[19] 张世伟,温燕修,韩进. 真空拾取器拾取动作响应时间与影响因素的研究[J]. 真空科学与技术学报,2010,30(1):92-95. Zhang Shiwei, Wen Yanxiu, Han Jin. Response time of vacuum sucking discs[J]. Chinese Journal of Vacuum Science and Technology, 2010, 30(1): 92-95. (in Chinese with English abstract)
[20] 孔珑. 两相流体力学[M]. 北京:高等教育出版社,2004.
[21] 龚智强,陈进,李耀明,等. 吸盘式精密排种装置吸种过程气流场中种子受力研究[J]. 农业机械学报,2014,45(6):92-98. Gong Zhiqiang, Chen Jin, Li Yaoming, et al. Seed force in airflow field of vacuum tray precision seeder device during suction process of seeds[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(6): 92-98. (in Chinese with English abstract)
[22] 陈书法,张石平,李耀明. 压电型振动气吸式穴盘育苗精量播种机设计与试验[J]. 农业工程学报,2012,28(增刊1):15-20. Chen Shufa, Zhang Shiping, Li Yaoming. Design and experiment of piezoelectric type vibration air-suction precision seeder withholey tray[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(Supp.1): 15-20. (in Chinese with English abstract)
[23] 金波,林龙贤. 果蔬采摘欠驱动机械手爪设计及其力控制[J]. 机械工程学报,2014,50(19):1-8. Jin Bo, Lin Longxian. Design and force control of an underactuated robotic hand for fruit and vegetable picking[J]. Journal of Mechanical Engineering, 2014, 50(19): 1-8. (in Chinese with English abstract)
[24] Gasparetto A, Zanotto V. Optimal trajectory planning for industrial robots[J]. Advances in Engineering Software, 2010, 41: 548-556.
[25] 杨玉维,赵新华,孙启湲,等. 基于多体动力学特性的机械手时间最优轨迹规划[J]. 机械工程学报,2014,50(7):8-14. Yang Yuwei, Zhao Xinhua, Sun Qiyuan, et al. Trajectory optimization of manipulator for minimum working time based on multi-body dynamic characters[J]. Journal of Mechanical Engineering, 2014, 50(7): 8-14. (in Chinese with English abstract)
[26] 纪超,冯青春,袁挺,等. 温室黄瓜采摘机器人系统研制及性能分析[J]. 机器人,2011,33(6):726-730. Ji Chao, Feng Qingchun, Yuan Ting, et al. Development and performance analysis on cucumber harvesting robot system ingreenhouse[J]. Robot, 2011, 33(6): 726-730. (in Chinese with English abstract)
[27] Hayashi S, Shigematsu K, Yamamoto S, et al. Evaluation of a strawberry-harvesting robot in a field test[J]. Biosystems Engineering, 2010, 105(2): 160-171.
[28] 杨庆华,张立彬,鲍官军,等. 气动柔性弯曲关节的特性及其神经PID控制算法研究[J]. 农业工程学报,2004,20(4):88-91. Yang Qinghua, Zhang Libin, Bao Guanjun, et al. Investigation of the characteristics of pneumatic flexiblebending joint and its neural PID controlling algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004, 20(4): 88-91. (in Chinese with English abstract)
[29] 姬伟,罗大伟,李俊乐,等. 果蔬采摘机器人末端执行器的柔顺抓取力控制[J]. 农业工程学报,2014,30(9):19-26. Ji Wei, Luo Dawei, Li Junle, et al. Compliance grasp force control for end-effector of fruit-vegetable picking robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(9): 19-26. (in Chinese with English abstract)
[30] 王明顺,关守平. 一种分类机械手的研制与开发[J]. 东北大学学报:自然科学版,2006,27(9):957-960. Wang Mingshun, Guan Shouping. Research and development of a sorting manipulator[J]. Journal of Northeastern University Natural Science, 2006, 27(9): 957-960. (in Chinese with English abstract)
Design and test of vacuum suction device for egg embryo activity sorting robot
Huang Chao1,2,Liu Yancong1※,Yi Peng1
(1. College of Mechanical and Electronic Engineering, China University of Petroleum,Qingdao 266580, China; 2. College of Electrical Engineering Binzhou University, Binzhou 256600, China)
There are problems such as egg embryo falling and embryo aspiration in the sorting process of the 168-egg tray automatic sorting devices. In order to solve these problems, combined with the existing egg embryo sorting technology in China and abroad, we take the vacuum generator with negative pressure control as the core to design a vacuum chuck with independent negative control circuits. Based on the theoretical analysis of airflow fields during the process of holding egg embryo, the levitation force of the egg embryo and the suction cup is compared with the negative pressure suction at the time of contact, and the suction cup is optimized. At the time of holding, the sucker can be a good coupling with the egg embryo, so as to reduce the suction negative pressure. Meanwhile, the influencing factors of the vacuum sucker airflow field, such as the relationship between the length of the negative pressure trachea and the response time of the negative pressure, the performance of the vacuum generator, the shape of the sucker, the force of suction, the capacity of the accumulator and the amount of negative pressure, are analyzed theoretically and tested, thus allowing to optimize the control mode of the gas path. Through the analysis of the airflow field, the high pressure accumulator is used to drive the vacuum generator to provide negative pressure, and each sucker is controlled independently. The negative pressure balance of the vacuum sucker is achieved by using single point negative pressure generation and single point control. This method eliminates the negative pressure difference between the pipelines caused by the centralized negative pressure supply of the vacuum pumps, and it also prevents the egg embryo from falling and the leakage phenomenon caused by negative pressure unloading near the negative pressure pipeline when a pipe leaks. The vacuum generator’s independent circuit for the control of negative pressure also limits the negative pressure, thus reducing the negative pressure circuit’s negative pressure fluctuations, improving the reliability of the system support, and also solving the problem of embryo aspiration caused by an excessive negative partial pressure in the centralized negative pressure supply mode. Through the egg embryo holding kinetics, combined with the mobile control system requirements of the sucker device, the axial and radial forces required to suck the eggs are analyzed, and the pleated suction cup and the buffer rod of sucker are used, so the sucking disc and egg embryo can be well coupled before being sucked. It can also reduce the critical flow rate, so as to reduce the critical negative pressure of egg embryo. This solves the problem of germplasm aspiration during egg absorption, improves the dynamic response of the system, and reduces energy consumption. According to the analysis and design of the prototype, the egg sorting test and pressure supply performance verification of the negative pressure system are carried out. Each independent negative pressure circuit achieves a stable negative pressure supply, therefore reducing the amount of air consumption. The reliable embryo egg absorption rate is 99.89%, without any egg embryo falling nor embryo aspiration phenomenon.
vaccines; sorting; machinery; improvement; egg embryo; negative-pressure system; vacuum sucker; vacuum generator
10.11975/j.issn.1002-6819.2017.16.036
TH69
A
1002-6819(2017)-16-0276-07
黄 超,刘衍聪,伊 鹏. 蛋胚成活性分拣机器人真空吸盘装置设计与试验[J]. 农业工程学报,2017,33(16):276-282.
10.11975/j.issn.1002-6819.2017.16.036 http://www.tcsae.org
Huang Chao, Liu Yancong, Yi Peng. Design and test of vacuum suction device for egg embryo activity sorting robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(16): 276-282. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.16.036 http://www.tcsae.org
2017-03-25
2017-08-07
国家自然科学基金项目(51405512);山东省重点研发计划项目(2016GNC112015);山东省自然基金(面上)项目(ZR2013EEM031)
黄超,男(汉族),山东临沂人,博士生,讲师,主要研究方向为智能控制与检测、智能机械。青岛 中国石油大学(华东)机电工程学院,266580。Email:hc8247@163.com
※通信作者:刘衍聪,男(汉族),山东淄博人,博士,教授,博士生导师,主要研究方向工程图学、智能机械。青岛 中国石油大学(华东)机电工程学院,266580。Email:liuycupc@163.com