宏微直线压电电机微驱动机构设计与分析*
2017-09-12张铁民李晟华廖贻泳
张铁民,李晟华,梁 莉,廖贻泳,曹 飞,文 晟
(1.华南农业大学工程学院 广州,510642)(2.国家生猪种业工程技术研究中心 广州,510642)
宏微直线压电电机微驱动机构设计与分析*
张铁民1,2,李晟华1,梁 莉1,廖贻泳1,曹 飞1,文 晟1
(1.华南农业大学工程学院 广州,510642)(2.国家生猪种业工程技术研究中心 广州,510642)
为了解决宏微驱动直线压电电机微驱动位移较小、对宏动定位误差的补偿能力不足的问题,提出一种宏微驱动钹型直线压电电机。采用钹型复合压电叠堆为驱动单元替换压电陶瓷片组成的压电叠堆,实现轴向位移的一次放大,通过弹性拨齿的柔性铰链结构将钹型压电叠堆输出的微位移二次放大。该电机可在特定的驱动频率、工作电压和相位差下实现振子振动模态下的超声驱动,也可以通过微位移放大机构实现静态变形的微驱动(蠕动)。建立了该直线压电电机的三维有限元模型,利用有限元软件分别对弹性拨齿、钹型压电叠堆和复合振子进行静力学分析和静态优化设计。有限元仿真表明:基于柔性铰链结构的弹性拨齿经过优化后,最小刚度小于钹型压电叠堆的最小刚度;在相同条件下,优化后钹型压电叠堆沿轴向方向的静态变形量比由压电陶瓷片组成的压电叠堆的静态变形量提高了8.45倍;采用基于柔性铰链结构的弹性拨齿和钹型压电叠堆组成的复合振子的拨齿质点沿水平方向的静态位移量比优化前提高了12.1%,大幅提高了微驱动对宏动定位误差的补偿能力,为压电电机微驱动的结构设计及优化提供依据。
压电电机;微驱动;柔性铰链;钹型压电叠堆
引 言
随着社会发展,对传统制造加工行业的运动速度和定位精度提出了越来越高的要求。从20世纪80年代中后期开始,国内外学者相继提出了宏微双重驱动技术[1-4]。其中,宏微型压电电机具有分辨率高、响应快、体积小和效率高等优点,广泛应用在超精密加工领域[5]。宏驱动部分完成电机高速度、大行程和低分辨率的工作,微驱动部分则负责行程小、分辨率高的任务,并用来补偿宏驱动位移误差和抑制残余振动[6]。节德刚等[7]研制出一种宏微双重驱动精密定位机构,进行了建模和控制方法研究。该系统的动态和稳态性能良好,不足之处在于,虽然在宏动部分采用高性能直线电机取代“旋转伺服电动机+滚珠丝杠”,但始终无法实现定位机构微型化和宏微驱动切换的快速响应。Kim等[8]设计了一种基于自移动细胞式的宏微直线压电电机,该电机由弹性壳结构和压电叠堆驱动器组成。试验表明,在宏运动中激励频率为80Hz的条件下,该电机最大速度可达到1.05mm/s,最大输出力为4.3N;在微运动中通过引入补偿电压来消除第1个移动细胞的滞后性,该电机实现了12nm的最高分辨率。张铁民等[9-11]提出了一种基于压电转换的宏微驱动集于一体的新型直线压电电机。曹飞[12]研究发现,通过对不同尺寸参数进行灵敏度分析,可分别对压电电机宏、微驱动进行优化。
笔者在此基础上对该电机进行结构改进和优化设计,用钹型复合压电叠堆为驱动单元以替换纯压电陶瓷片组成的压电叠堆,将弹性拨齿改进为带有柔性铰链的弹性拨齿结构,以进一步增加宏微驱动的直线压电电机微位移,达到提高微驱动对宏动误差补偿能力的目标。
1 压电电机的结构和工作原理
图1为压电电机的结构分解图。电机动子即为电机的输出轴,电机定子由左右两端的端盖、压电叠堆和弹性拨齿组成。压电叠堆为多片沿轴向极化的圆环型压电陶瓷,并由端盖与弹性拨齿之间的螺纹连接实现压紧。定子工作前,调整紧固螺栓施加合适的预压力使弹性拨齿中间的拨齿夹紧动子。当定子两端的压电叠堆同时接上特定的交变电压后,利用压电叠堆的逆压电效应激发出定子工作所需的振动模态,在定子弹性拨齿的拨齿处形成椭圆运动轨迹,依靠动子与拨齿的摩擦,从而驱动电机动子做大行程的高速直线运动,即宏驱动运动。当把交变电压信号切换成直流电压信号,压电叠堆发生静态变形,依靠拨齿与动子的摩擦,从而驱动电机动子做高分辨率的低速直线运动,即微驱动运动。文献[9-10]的试验表明,该压电电机能实现宏、微直线运动,在200V的直流电压下微驱动位移仅为2.0×10-7m,在实际应用中较小的位移无法补偿宏动定位误差,造成该电机的定位精度下降。为此,笔者提出用钹型压电叠堆替代压电叠堆,以增加宏微直线压电电机的微驱动位移范围。
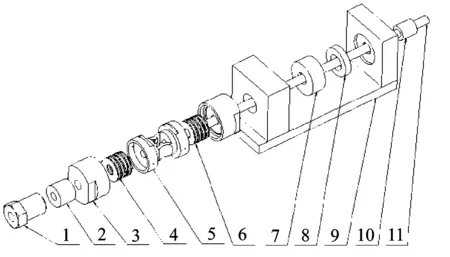
1-紧固螺栓;2-光轴;3-端盖;4-接线端子;5-弹性拨齿;6-压电陶瓷;7-套筒;8-橡胶垫圈;9-机架;10-直线轴承;11-电机动子图1 压电电机结构分解图Fig.1 Structure exploded view of piezoelectric motor
2 钹型压电叠堆结构及微位移放大原理
图2为传统压电叠堆结构示意图。它由4片沿轴向方向极化的压电陶瓷圆环极性相反相互贴合成一组。作为驱动源,压电叠堆将外界的电压信号转化成机械变形,其变形量大小直接影响动子的位移量。为增大压电叠堆的变形量,笔者考虑用钹型压电叠堆替代传统压电叠堆。钹型压电叠堆是用粘接剂把两片金属钹盖和两片沿轴向方向极化的圆环型压电陶瓷粘接组成的复合结构,其结构示意图如图3所示。其中,金属钹盖与压电陶瓷圆环耦合作用改变压电陶瓷圆环的应力分布,并将径向应力转变成轴向应力,使得沿厚度方向极化压电陶瓷圆环的压电常数d31和d33产生的压电效应相加[13]。在相同的激励条件以及d31不变的情况下,钹型压电叠堆的等效压电常数d33比相同尺寸压电陶瓷本身提高40倍[14]。
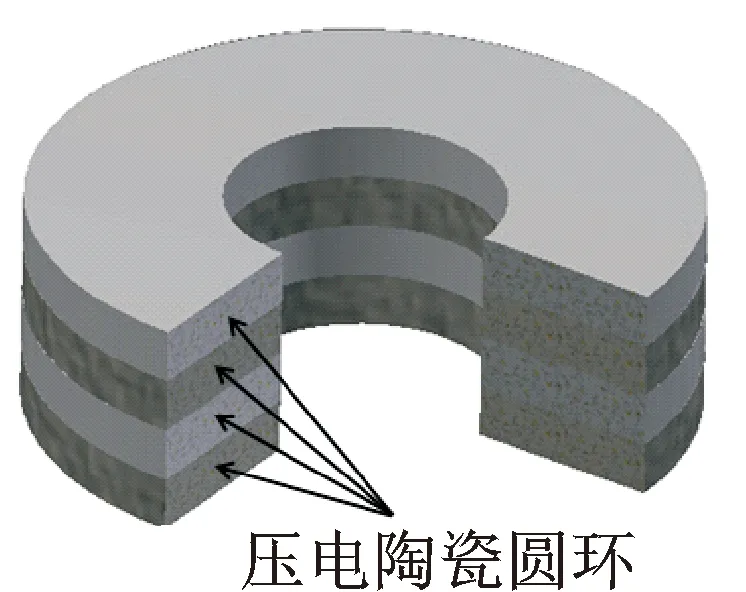
图2 压电叠堆结构示意图Fig.2 Structural schematic of piezoelectric stack
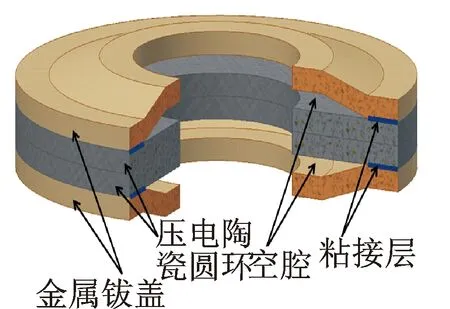
图3 钹型压电叠堆结构示意图Fig.3 Structural schematic of cymbal piezoelectric stack
钹型压电叠堆在施加电压之后,压电陶瓷产生变形,从而引起金属钹盖发生轴向变形,如图4所示。由于体积不变,在施加正向电压时,压电陶瓷轴向伸长,径向缩小2ε,从而引起单片金属钹盖在竖直方向上的轴向变形μ,如图4(a)所示。在没有施加电压的时候,钹型压电叠堆没有发生变形,如图4(b)所示。在施加反向电压时,压电陶瓷轴向缩短,径向伸长2ε,从而引起单片金属钹盖在竖直方向的轴向变形,如图4(c)所示。
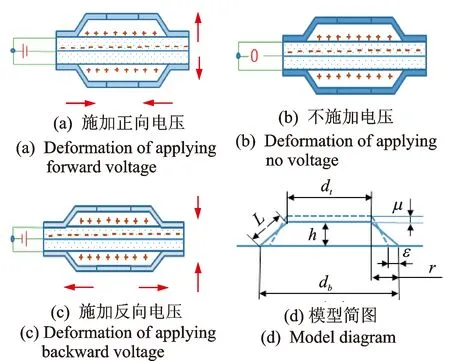
图4 钹型压电叠堆变形示意图Fig.4 Deformation schematic of cymbal piezoelectric stack
在金属钹盖斜边的长度L不变的条件下,根据图4(d)所示的几何关系得到
(1)
化简后,得到单个金属钹盖的轴向位移为

(2)
其中:h为钹盖空腔的高度;ε= -d31Edb/2为金属钹盖和压电陶瓷圆环的径向位移;d31为径向压电常数分量;E为激励电场强度;db为金属钹盖底部直径;r=(db-dt)/2为金属钹盖上、下半径差;dt为金属钹盖顶部直径。
钹型压电叠堆在正电场激励下的轴向总位移为
Δ=2μ+2Δz
(3)
其中:Δz=d33Et为单片压电陶瓷圆环在激励电场E作用下的轴向伸长量;t为压电陶瓷厚度。
显然,钹型压电叠堆的轴向变形量与金属钹盖的结构尺寸参数和压电陶瓷的结构尺寸参数、材料属性有关。
3 微位移放大弹性拨齿结构
微位移放大弹性拨齿结构对压电电机直线运动性能影响非常大。微驱动时,钹型压电叠堆的微位移能否传递到拨齿上,宏驱动时,能否在拨齿上形成椭圆运动轨迹并加以放大,都取决于微位移放大弹性拨齿的结构。图5为微位移放大弹性拨齿结构初始结构[9,11]。它既能在宏驱动中使它的拨齿质点形成椭圆运动,进而驱动动子实现宏观的直线运动,又能在微驱动中其螺纹端部产生弹性变形,将压电叠堆的微位移传递给动子。
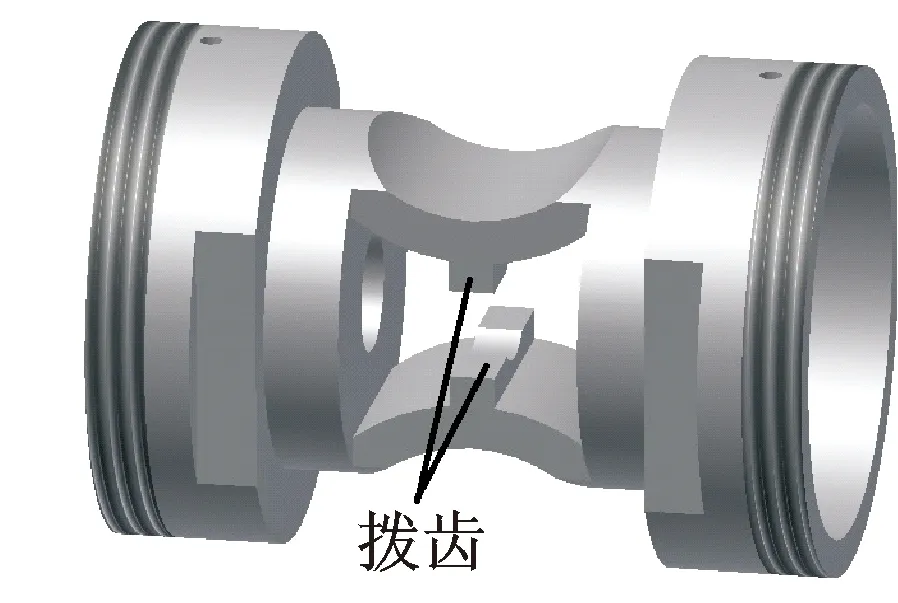
图5 优化前弹性拨齿结构示意图Fig.5 Structural schematic of elastomer before optimization
试验发现,由于压电叠堆的刚度较小,微位移放大弹性拨齿刚度较大,使钹型压电叠堆的微位移未能完全传递到拨齿上,进而导致动子的移动量较小。为此,笔者对微位移放大弹性拨齿进行改进,改进后弹性拨齿的结构如图6所示。在结构各联接处增加柔性铰链,以便将微位移二次放大[15-16],并降低微位移放大弹性拨齿的刚度,使其与压电叠堆的刚度相当。当钹型压电叠堆产生轴向变形时,推动端面绕着柔性铰链的最小厚度处微旋转,从而带动拨齿水平移动,起到增加动子微位移量的目的。
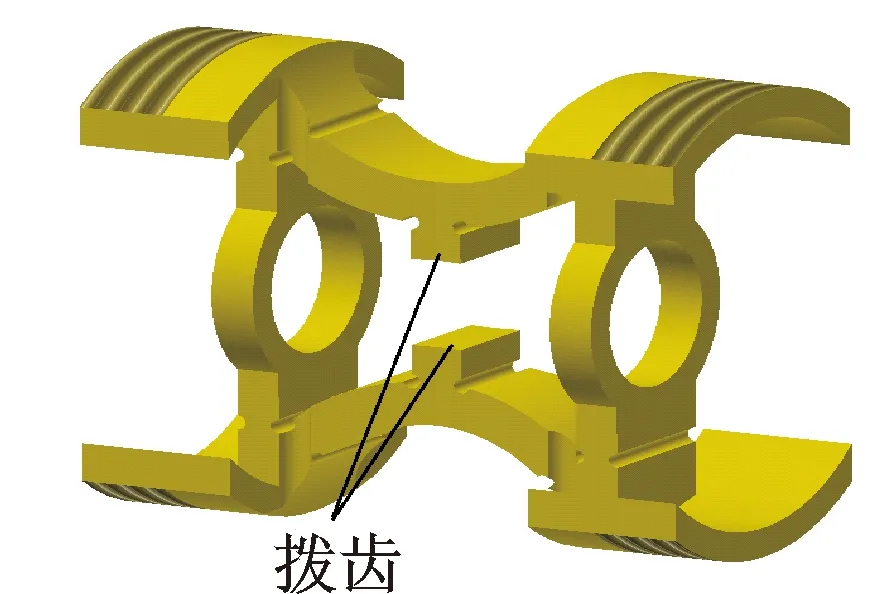
图6 优化后弹性拨齿结构示意图Fig.6 Structural schematic of elastomer after optimization
4 有限元分析及优化
首先,确定电机的初始结构参数,建立参数化的有限元模型;然后,通过灵敏度分析选择结构参数作为优化设计变量[9-10],确定参数的变化范围,明确优化目标函数;最后,选择优化方法,通过一系列的循环过程优化各设计变量,直到达到最优。
4.1 复合振子有限元模型
复合振子的有限元模型如图7所示。按照默认设置进行智能化,网格划分为170 860个单元和538 322个节点,端盖材料为45#不锈钢,钹型压电叠堆的金属钹盖和弹性拨齿为铍青铜,压电陶瓷为PZT-4。材料属性参数如表1所示。
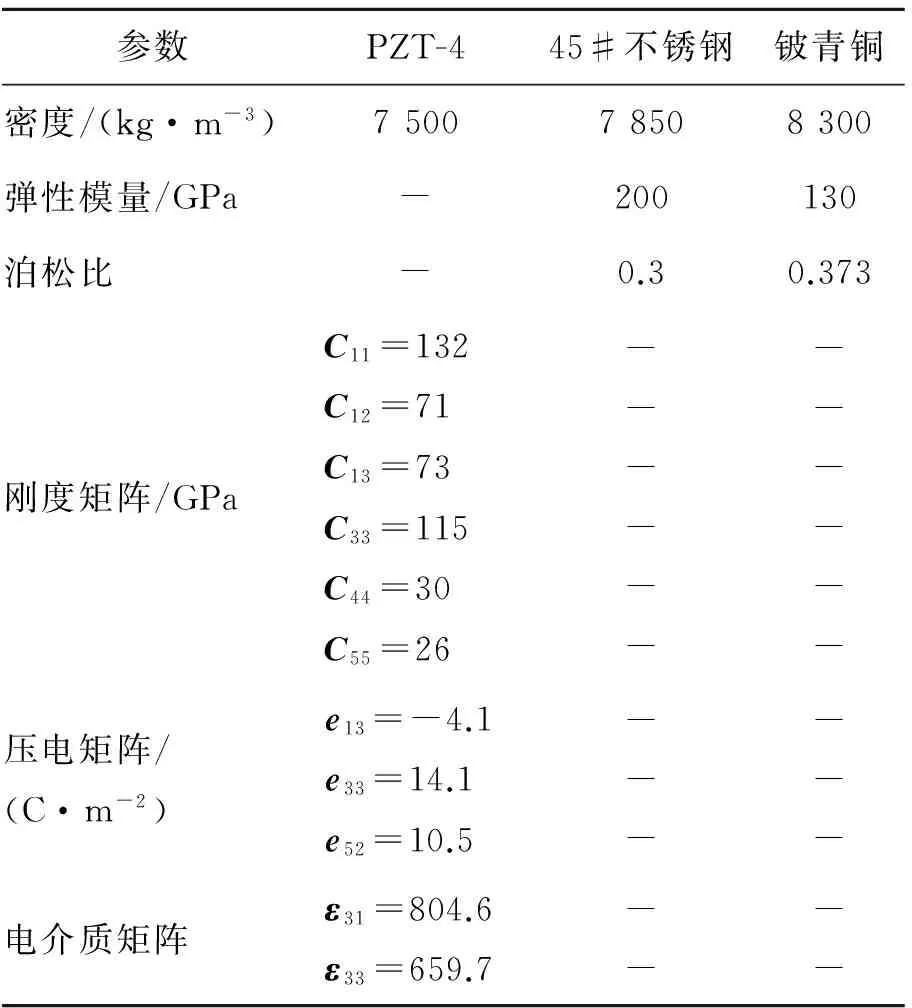
表1 材料属性参数Tab.1 Parameter list of material property
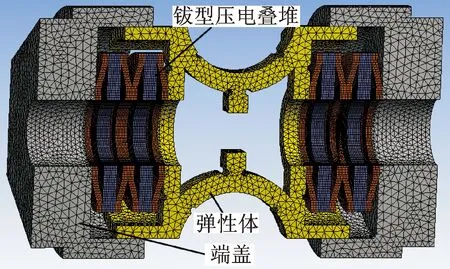
图7 复合振子的有限元模型Fig.7 Finite element model of composite vibrator
4.2 弹性拨齿静力学分析及优化
当弹性拨齿的材料参数确定后,其性能取决于弹性拨齿的结构参数。弹性拨齿的结构参数如图8所示。通过灵敏度分析确定弹性拨齿的结构参数如表2所示[9-10]。
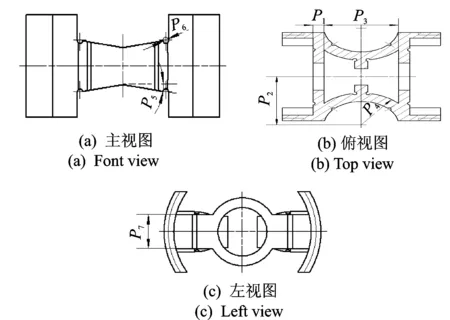
图8 弹性拨齿的结构参数Fig.8 Structure parameters of elastomer
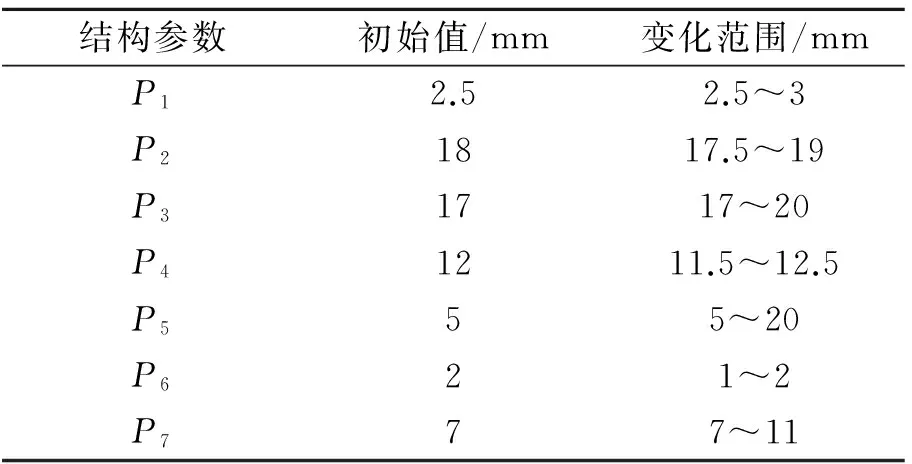
表2 弹性拨齿的结构参数Tab.2 Structural parameters table of elastomer
在弹性拨齿与钹盖的接触面上,给弹性拨齿施加均布载荷100 N,在弹性拨齿两端面施加水平和竖直方向的零位移约束,同时选取该面的位移S1、弹性拨齿质点的位移S2和最大等效应力σ1作为优化目标,对弹性拨齿进行静力学分析。ANSYS WORKBENCH根据自身的优化算法对各个参数在设定的变化范围内进行组合,并重建模型进行静力学分析。经过50次计算结果如表3所示。
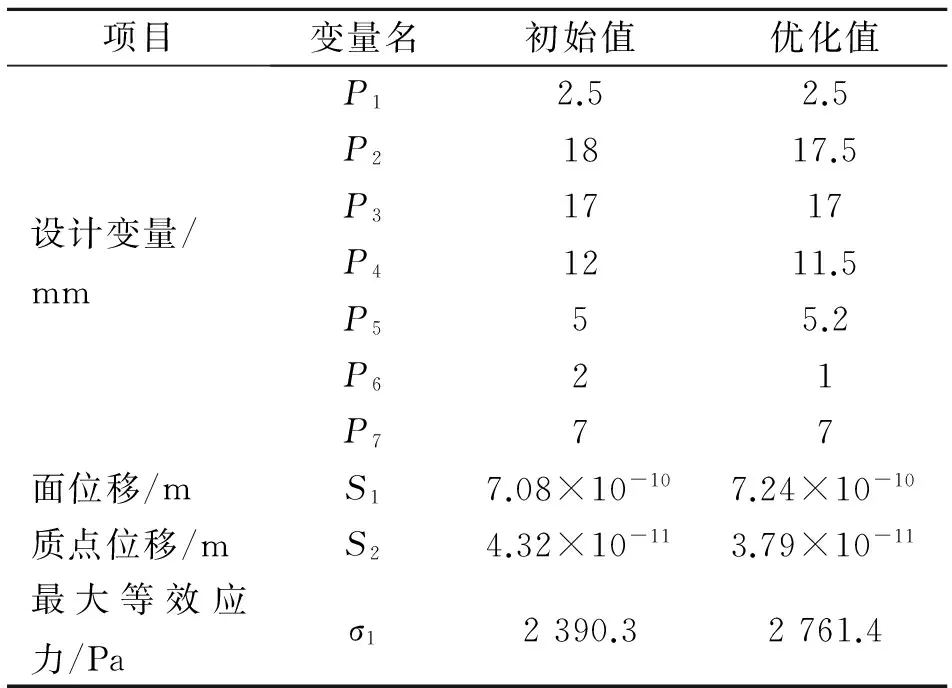
表3 优化前后设计变量及目标函数Tab.3 Design variables and objective functions before and after optimization
弹性拨齿经过优化后,最小刚度从1.41×1011N/m减少到1.38×1011N/m,最大等效应力为2 761.4 Pa,远小于材料的许用应力。
4.3 钹型压电叠堆静力学分析及优化
在第1组静力学分析中,对钹型压电叠堆正电极面施加100 V的直流电压,负电极为0 V,经ANSYS有限元软件计算,得到钹盖最大输出微位移S3。在第2组静力学分析中,对钹盖施加均布载荷100N,将钹盖最大变形量S4和最大等效应力σ2作为求解目标。其结构参数如图9所示。采用灵敏度分析法确定钹型压电叠堆结构参数如表4所示。
图9 钹型压电叠堆结构参数Fig.9 Structure parameters of cymbal piezoelectric stack
表4 钹型压电叠堆的结构参数Tab.4 Structural parameters table of cymbal piezoelectric stack
对优化目标S3,S4和σ2求最大值,经过30次计算结果如表5所示。钹型压电叠堆经过优化后,最小的刚度从2.82×1010N/m增加到1.8×1011N/m,最大等效应力为1.4 MPa,远小于材料的许用应力。
表5 优化前后设计变量及目标函数Tab.5 Design variables and objective functions before and after optimization
传统压电叠堆是用粘接剂把沿轴向极化的圆环型压电陶瓷粘接组成的结构。在其正电极面上施加幅值为100 V的直流电压,负电极为0 V,静力学计算结果如图10所示。其中,压电叠堆沿轴向方向的变形量为3.07×10-8m。优化后的钹型压电叠堆在相同条件下沿轴向的变形量为2.9×10-7m,比压电叠堆的轴向变形量提高了8.45倍。钹型压电叠堆的最小刚度高于弹性拨齿的最小刚度,满足设计要求。
图10 压电叠堆在轴向方向的变形量Fig.10 Deformation in the axial direction of piezoelectric stack
4.4 复合振子静力学分析
在复合振子的钹型压电叠堆上施加100V直流电压,对两端的端盖施加位移约束,优化后的复合振子静力学分析的结果如图11(a)所示。其中弹性拨齿质点在钹型压电叠堆驱动作用下沿水平方向的位移量为1.82×10-8m,对优化前电机施加相同的约束后计算结果如图11(b)所示。其中,拨齿质点相应的位移量为1.39×10-9m,相比之下,优化后的位移量比优化前增大了12.1%。

图11 复合振子的静态变形Fig.11 Static deformation of composite vibrator
5 结 论
1) 基于柔性铰链结构的弹性拨齿经过优化后,最小刚度从1.41×1011N/m减少到1.38×1011N/m。钹型压电叠堆经优化后,最小刚度从2.82×1010N/m增加到1.8×1011N/m。前者的最小刚度小于后者,有利于静态变形的可靠传递。
2) 在相同条件下,优化后钹型压电叠堆沿轴向方向的静态变形量为2.9×10-7m。纯压电陶瓷片组成的压电叠堆沿轴向方向的静态变形量为3.07×10-8m。前者比后者提高了8.45倍。
3) 基于柔性铰链结构的弹性拨齿和钹型压电叠堆的复合振子的拨齿质点沿水平方向的静态位移量比优化前提高了12.1%。仿真结果表明,笔者提出的宏微驱动型压电电机的新型微驱动结构可行,微位移量明显增大。
4) 提出的新型微驱动结构电机能否按照设想进行运动,还需结合宏驱动进行研究。因此本课题组将在此微驱动基础上对宏驱动结构进行进一步设计,使电机的弹性拨齿能产生椭圆运动轨迹。
[1] Sharon A,Hogan N,Hardt D E.High bandwidth force regulation and inertia reduction using a macro/micro manipulator system[C]∥Proceedings of the 1988 IEEE International Conference on Robotics and Automation.[S.l.]:IEEE,1988:126-132.
[2] Morrell J B,Salisbury J K.Parallel-coupled micro-macro actuators[J].The International Journal of Robotics Research,1998,17(7):773-791.
[3] Weber T E,Hollis R L.A vision based correlator to actively damp vibrations of a coarse-fine manipulator[C]∥Proceedings of the 1989 IEEE International Conference on Robotics and Automation.[S.l.]:IEEE,1989:818-825.
[4] 陈启军,王月娟.激光作业的宏-微机器人及其控制系统[J].机器人,1999,21(3):128-133.
Chen Qijun,Wang Yuejuan.Macro/micro manipulator and control system driven by laser[J].Robot,1999,21(3):128-133.(in Chinese)
[5] 刘落实,张铁民,张建桃.直线型超声电机在机床进给系统中的应用[J].组合机床与自动化加工技术,2004(5):32-34.
Liu Luoshi,Zhang Tiemin,Zhang Jiantao.Application of linear ultrasonic motor on machine tool′s feeding system[J].Modular Machine Tool &Automatic Manufacturing Technique,2004(5):32-34.(in Chinese)
[6] 徐源.宏微驱动超精密定位工作台在磨床上的应用研究[D].上海:东华大学,2008.
[7] 节德刚,刘延杰,孙立宁,等.一种宏微双重驱动精密定位机构的建模与控制[J].光学精密工程,2005,13(2):171-178.
Jie Degang,Liu Yanjie,Sun Lining,et al.Modeling and control of a macro micro dual drive ultra-precision positioning mechanism[J].Optics and Precision Engineering,2005,13(2):171-178.(in Chinese)
[8] Kim J,Kang B.Micro-macro linear piezoelectric motor based on self-moving cell[J].Mechatronics,2009,19(7):1134-1142.
[9] Zhang Tiemin,Cao Fei,Li Shenghua,et al.Finite element study on the cylindrical linear piezoelectric motor micro driven[C]∥Intelligent Robotics and Applications.[S.l.]:Springer International Publishing,2014:179-186.
[10] Zhang Tiemin,Cao Fei,Li Shenghua,et al.FEM analysis and parameter optimization of a linear piezoelectric motor macro driven[C]∥Intelligent Robotics and Applications.[S.l.]:Springer International Publishing,2014:171-178.
[11] 张铁民.宏/微双重驱动新型直线电机的研究[J].机电工程技术,2015,44(6):1-6.
Zhang Tiemin.Study on a new type of linear motor with macro-micro dual drive[J].Mechanical &Electrical Engineering Technology,2015,44(6):1-6.(in Chinese)
[12] 曹飞.宏微驱动直线压电电机结构设计及试验研究[D].广州:华南农业大学,2014.
[13] 王光灿,林宇,王丽坤,等.Cymbal换能器的有限元动力学分析[J].压电与声光,2003,25(5):418-421.
Wang Guangcan,Lin Yu,Wang Likun,et al.Dynamics analysis of Cymbal-type transducer with finite element method[J].Piezoelectrics &Acoustooptics,2003,25(5):418-421.(in Chinese)
[14] Dogan A,Uchino K,Newnham R E.Composite piezoelectric transducer with truncated conical endcaps "Cymbal"[J].IEEE Transactions on Ultrasonics,Ferroelectrics and Frequency Control,1997,44(3):597-605.
[15] 吴鹰飞,周兆英.柔性铰链的应用[J].中国机械工程,2002,13(18):1615-1618.
Wu Yingfei,Zhou Zhaoying.Application of flexure hinge[J].China Mechanical Engineering,2002,13(18):1615-1618.(in Chinese)
[16] 张建瓴,陈万银,可欣荣,等.一种微位移放大机构的设计与仿真[J].机械设计,2009,26(12):9-12.
Zhang Jianling,Chen Wanyin,Ke Xinrong,et al.Design and simulation of a kind of micro-displacement amplification mechanism[J].Journal of Machine Design,2009,26(12):9-12.(in Chinese)

10.16450/j.cnki.issn.1004-6801.2017.04.009
* 国家自然科学基金资助项目(51177053);广东省教育厅科技创新重点资助项目(2012CXZD0016);高等学校博士学科点专项科研基金资助项目(20124404110003);广州市科技计划资助项目(201510010227);广东省科技计划资助项目(2014A020208090)
2015-07-04;
2015-08-10
TN384;TH113.1
张铁民,男,1961年11月生,博士、教授、博士生导师。主要研究方向为微机电系统、机器人技术和智能检测与控制技术。曾发表《基于DM642的高地隙小车的田间路径识别导航系统》(《农业工程学报》2015年第31卷第4期)等论文。 E-mail:tm-zhang@163.com
