基于PreScan的侧后方车辆识别与跟踪算法的研究
2017-09-12葛如海张雪峰张美娟
葛如海张雪峰张美娟
(1.江苏大学,镇江 212013;2.无锡职业技术学院,无锡 214121)
基于PreScan的侧后方车辆识别与跟踪算法的研究
葛如海1张雪峰1张美娟2
(1.江苏大学,镇江 212013;2.无锡职业技术学院,无锡 214121)
为降低车辆换道时碰撞事故发生的概率,分析和研究了侧后方车辆识别和跟踪算法。首先利用积分图的方法加速Haar-like特征计算,结合级联分类器实现后方车辆的检测。基于MeanShift理论,提出纹理特征和传统颜色特征相结合的方式进行车辆跟踪。利用智能交通仿真软件PreScan构建仿真模型,验证算法的有效性。结果表明,该算法具有较高的识别率,能达到实时性的要求,并且跟踪效果良好。
1 前言
据不完全统计,2012~2015年间,我国发生了80余万起汽车交通事故,变换车道引发的事故占7%,其中75%是驾驶员的主观因素造成的[1]。GB 15084—2013《机动车辆 间接视野装置性能和安装要求》规定,间接视野装置(如摄像机)应作为换道时减少视觉盲区的重要装置。国内外学者进行了相关研究:Leanne等[2]提出使用全景式视觉传感器监测后方车辆;Michael等[3]使用激光传感器探测车辆尾部盲区;李军等[4]利用基于超声波传感器的“蝇眼”网络实现测距;李守晓等[5]采用毫米波雷达计算出换道时目标车辆信息。
目前,相关研究需要大量的实车试验,这大大增加了辅助驾驶系统的开发周期和研究成本。因此,本文在PreScan仿真平台上开发和验证了侧后方车辆识别和跟踪算法。
2 侧后方车辆识别
车辆识别流程如图1所示,它包括:样本训练模块,即提取正、负样本的特征,离线训练出车辆识别的分类器;多尺度识别模块,利用分类器对待识别图像进行处理,得到识别结果并标记。

图1 识别流程
2.1 正、负样本
正样本集应为包含侧后方车辆的图像,共1 000张,图片经过预处理,示例如图2所示。负样本集为不包含正样本中的图像,共3 300张,示例如图3所示。

图2 正样本示例

图3 负样本示例
2.2 积分图
积分图是对子区域进行加速求和的数学方法,通过计算任意矩形区域内的像素和,加速特征的计算。如图4所示,积分图中点(x,y)的大小等于其左上方区域内所有像素值总和:

式中,i(x′,y′)为点(x′,y′)的像素值;ii(x,y)为点(x,y)的积分值。

图4 积分图
2.3 Haar-like特征
Haar-like特征[6]即为类Haar特征,是指图像中的矩形特征。对于侧后方车辆,主要考虑其正面轮廓特征,如图5所示。

图5 Haar-like特征
2.4 分类器
为了获得侧后方车辆识别的分类器,首先提取样本Haar-like特征,通过训练得到弱分类器,利用权值系数的线性组合来构造强分类器,最后级联各强分类器。
2.4.1 弱分类器
每个弱分类器对应一个Haar-like特征,以一个合理的特征值为阈值,能降低弱分类器在对样本进行分类时的错误率。
2.4.2 强分类器
利用Adaboost算法构建强分类器,通过迭代的方法获取样本分布,强分类器包含弱分类器。其原理为:输入图像,弱分类器进行1或0(即有无车辆)投票,基于投票结果得到错误率,加权求和后得到分类结果。
2.4.3 级联分类器
从简单到复杂对强分类器进行逐级串联,得到级联分类器。含有车辆的图像子窗口需要通过层层强分类器,才能被最终识别,如图6所示。

图6 分类器识别过程
3 跟踪算法
在获得识别结果后,需对侧后方车辆进行跟踪,本算法可实现车辆跟踪,并且确定其行驶轨迹。
3.1 MeanShift算法
MeanShift又称漂移的均值变量。确定跟踪算法时需要建立目标模型、目标候选模型和相似性函数。
3.1.1 目标模型
若目标窗口中心为xc,第i点为{xi}i=1,2,…,n,n表示窗口中点的个数,则目标模型概率密度为:

式中,u=1,2,…,m;m为特征值个数;b(xi)为xi对应目标的特征函数值;δ为克罗内克脉冲函数;C为定常系数;kh(x)为核函数。
3.1.2 目标候选模型
若目标候选窗口中心为yc,第i点为{xi}i=1,2,…,n,l表示窗口中点个数,则目标候选模型概率密度为:

式中,h为核函数窗口大小,决定着权重分布;Ck为归一化系数。

3.1.3 相似性函数
qu与pu(yc)为离散密度分布,因此,利用Bhattacharyya系数进行两者相似度的估计:
同时,可计算离散分布间距离:

由式(6)可知,目标模型与候选模型距离越小,ρyc越接近1,即越相似,反之则相似程度越小。
3.1.4 目标跟踪
目标跟踪本质上是确定与目标窗口最近距离的目标候选窗口。以两窗口中点间的距离为标准,衡量是否成功跟踪。由前文分析可知,当qu与Pu(yc)的距离最小时,两者的相似度最大。所以,跟踪问题可以看成是求取最大相似度值,与之相对应的yc值便是目标候选位置:
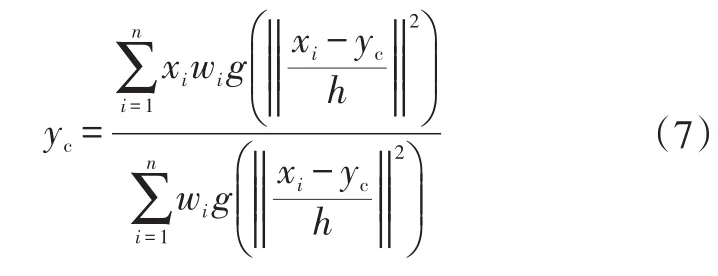
其中,加权系数为:

另外,因为跟踪算法中选取了Epanechnikov核作为核函数,因此有g(x)=1,得到最终的MeanShift跟踪算法的候选窗口中心迭代方程为:
3.2 颜色-纹理特征
在传统的颜色特征基础上,结合纹理特征来表征车辆特征,可以提高MeanShift算法跟踪目标的准确性。为了构造目标特征的三维空间,选择RGB图像中2个颜色通道,这里选用R、G通道与FLBP8,1[7](点样本纹理估计方法中的一种)纹理模型组成R×G×T三维空间(取R=8,G=8,T=5),用以表示车辆特征。若{xi,yj}i=1,2,…,n,j=1,2,…,m是目标窗口中的点,Histogram(8,8,5)为颜色-纹理特征直方图的特征空间矩阵,则在窗口中心为(xc,yc)的区域,计算每个点的R、G颜色分量及FLBP8,1值。同时计算其权值,可以得到以xc作为窗口中心的目标区域内的颜色-纹理模型直方图。将8×8×5直方图矩阵归一化后,最终可得目标模型{qu}u=1,2,…,m。候选目标模型的纹理-特征模型的计算过程与此相同。
3.3 跟踪算法过程
采集侧后方车辆连续帧的图像,对其进行图像识别后,定义首次出现车辆目标并被标记的图像作为初始帧,在初始帧中标记的矩形窗口称为目标窗口。利用基于颜色-纹理模型的MeanShift跟踪算法对车辆进行实时跟踪。对初始帧和其他连续帧图像进行处理,标记目标窗口中心,进而确定侧后方车辆的行驶轨迹,算法实现过程如图7所示。图中,N为算法可达到的最大迭代次数,通常根据试验确定,这里取N=15;ε为最小的目标窗口与候选目标窗口中心距离的阈值。迭代次数超过N或者两窗口间距离小于ε时,该跟踪算法收敛,即对目标车辆成功跟踪。

图7 跟踪算法流程
4 图像处理模块
本文获取图像时,选用摄像头传感器作为周围环境的感知工具。而摄像头传感器作为视觉传感器,具有其普遍的缺陷:处理速度慢,由于图像按帧采集并传输,且图像处理针对每一帧的像素,其信息量大,耗时长;鲁棒性差,易受环境等因素的影响,如光线、天气状况、路面状况、周围的树木、房屋、行人、路牌等都会影响采集的图像质量,增加图像处理的难度。此外,由于虚拟摄像头直接采集的图像为连续的彩色图像(RGB),RGB图像含有3个颜色通道,往往需要较大存储空间。若直接用其进行侧后方车辆识别,处理效率低。同时,采集的RGB图像受外界环境的影响较大,如雨雪天气、光线明暗、行驶过程中摄像头的抖动等,都可能导致图像中目标车辆的特征不明显,影响对侧后方车辆的最终识别。
因此,对于所获得的图像信息应首先进行必要的预处理,以尽量抑制甚至消除上述不足,在保证后续正确识别并追踪侧后方车辆的同时,减小图像处理的工作量,加快处理速度。本文中图像预处理算法包括图像灰度化、图像的对比度增强等。
4.1 图像灰度化
通常,数字图像的灰度化处理可采用平均值法、最大值法或加权平均值法。对于RGB图像,平均值法即对R、G、B 3个颜色分量值取平均值为灰度值,即I(x,y)=[R(x,y)+G(x,y)+B(x,y)]/3;最大值法即对R、G、B 3个颜色分量值取最大值为灰度值,即I(x,y)=max(R(x,y),G(x,y),B(x,y)),其中(x,y)为图像中像素点的坐标。
平均值法和最大值法虽具有计算量小、运算速度快的优点,但其获得的灰度图像不大符合人类的视觉习惯。在平均值法基础上进行改进可获得加权平均值法,即将R、G、B 3个颜色分量值前的系数1/3分别替换为a、b、c,且满足a+b+c=1。前人从理论出发,即人眼对颜色的敏感程度[8]为绿色>红色>蓝色,并结合大量实验得出结论,当权重系数 a、b、c分别为 0.298 9、0.587 0、0.114 0时,获得的灰度值更易于人眼接受。
4.2 图像对比度增强
图像的对比度增强有时间域和空间域两类方式。由于后者直接作用于像素,故相对于前者具有运算量小、速度快、实时性强的优点,又结合本文采集到的图像的特点,选择对增强图像局部对比度效果较明显的直方图均衡化(Histogram Equalization)方法。直方图均衡化[9]的中心思想是将由原始图像中的像素灰度级获得的灰度直方图变换为离散的、均匀分布的灰度直方图,也就是将特定区域的灰度级范围变宽,通过增强整个图像的对比度来消除由于光线过亮或过暗导致的局部特征不明显现象。
直方图均衡化处理前、后的图像及其灰度直方图如图8、图9所示。由图8可直观地看出,目标车辆与路面、天空及周围建筑的反差变大,图像中目标车辆的轮廓凸显出来,虽然路面上加入了一些噪声,但不影响目标车辆的识别;由图9可知,直方图均衡化后,图像的灰度直方图灰度级分布范围变宽且更均匀,灰度级分布由原来的0~180扩展至0~255。就感兴趣区域而言,局部区域对比度增强,这为下一步准确识别目标车辆打下了基础。

图8 数字图像

图9 灰度直方图
5 算法的验证
识别和跟踪算法在MATLAB/Simulink软件与PreScan平台中开发和实现。在PreScan软件中对换道场景进行配置,场景包含多种模型参数,这些参数和仿真过程中采集到的各种参数都可以发送到MATLAB/Simulink中。运行侧后方车辆识别和跟踪算法后,即可以实现车辆换道场景的实时仿真。
5.1 仿真平台
仿真平台主要包括以下模块:人机交互界面(Graphical User Interface,GUI)、视频显示器(Viewer)以及MATLAB中的Simulink操作界面。
5.1.1 GUI
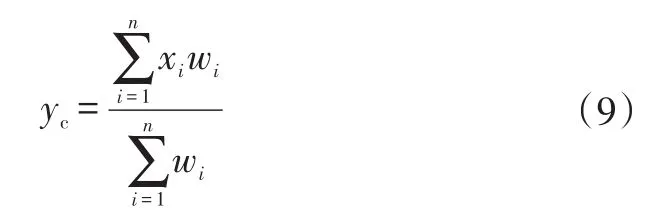
在GUI中,可快速设置车辆参数和换道所需要的道路交通模型,同时根据仿真需求确定行驶轨迹。以某车型为自车,车辆相关参数的设置如图10所示。
为了采集相邻车道与自车车道的图像信息,需要加入摄像机模型。按照GB 15084—2013的要求对摄像头位置参数进行设置,将虚拟摄像机安装在自车外后视镜下方,如图11所示,摄像机性能参数如表1所示。

图10 车辆参数
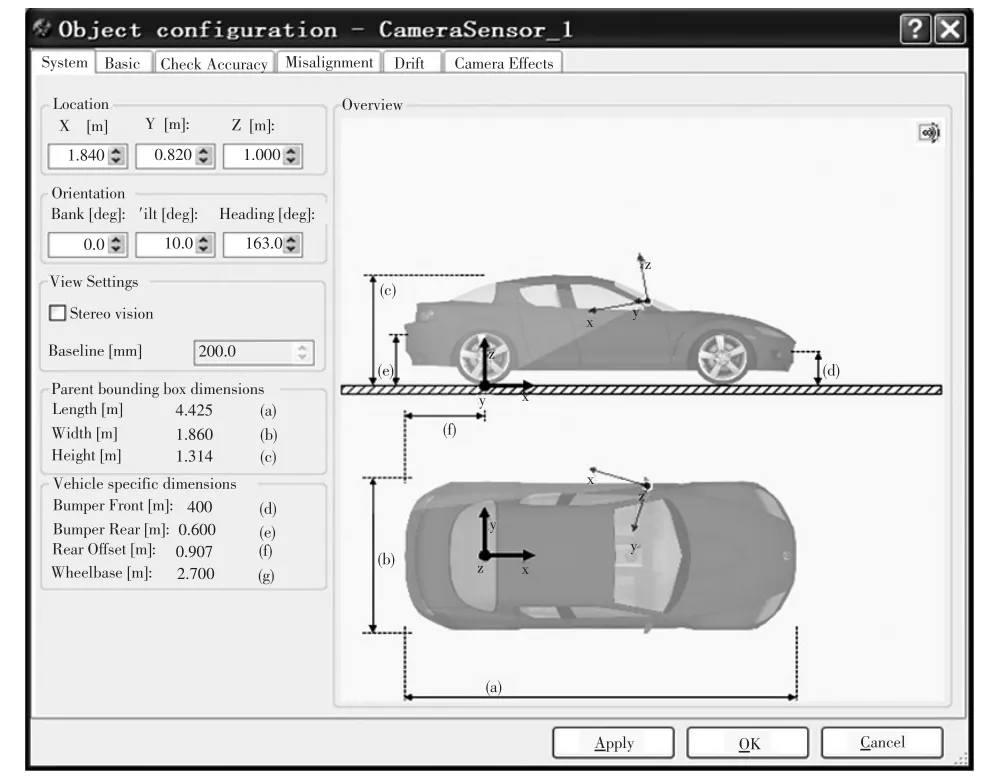
图11 位置参数

表1 摄像机性能参数
5.1.2 视频显示器
视频显示器即可视模块,可以通过加载或者编辑各种现存模块,例如车辆、道路和建筑等,以3D和动画的形式将2D模型显示出来,如图12所示。另外,可以通过改变动画视角来全方位查看仿真过程,这在实车试验中是很难做到的。

图12 不同视角的3D场景
5.2 侧后方车辆识别与跟踪验证
为了验证本文提出的侧后方车辆识别与跟踪算法,在本文建立的虚拟仿真平台下,建立单向双车道虚拟交通环境并设置相应的运行轨迹、速度等信息。
5.2.1 车辆识别
为了验证侧后方车辆识别算法的有效性,分别对侧后方车辆接近自车、自车进行换道操作两种工况下的系列帧图像进行采集,结果分别如图13、图14所示。
由图13可知,当侧后方车辆与自车距离大于60 m时,由于后方车辆过小,并没有识别到;距离小于60 m时,车距逐渐减小,侧后方车辆在图像中所占比例逐渐增大,车辆识别效果较好,即该算法的有效识别距离可以达到60 m。
由图14可知,自车在换道过程中,虽然侧后方车辆相对于自车角度发生变化,但都能被准确识别。Haarlike能准确地提取车辆的前轮廓线特征和边缘特征,通过大量样本的训练得到了性能优良的分类器,所以,即使是不同角度的车辆也能被很好地识别。
另外,在所测试的320帧图像(两种工况各160帧)中,识别率可达95%,识别效果良好,单幅图片平均处理时间为25 ms,算法具有较好实时性。

图13 接近工况

图14 换道工况
5.2.2 车辆跟踪
以初始帧图像中侧后方车辆识别标记的矩形窗口为车辆跟踪算法的初始化窗口,同时标记出每个矩形窗口的中点。通过车辆接近自车、车辆落后自车两种工况进行跟踪算法的验证,采集系列帧图像,处理效果如图15所示。

图15 跟踪效果
由图15可知,两种工况下,矩形窗口的中心位置变化即为仿真过程中车辆的运行轨迹。因为所采集系列帧图像中的标记矩形窗口中点近似为一条直线,与预先设置的侧后方车辆运行轨迹路线和可视模块中的显示效果相符合,所以该算法的有良好的跟踪效果。
6 结束语
本文通过积分图的方法加速了Haar-like特征的计算,减少了图像处理的时间,算法具有较好的实时性。利用Haar-like特征和级联分类器结合的方式对车辆进行识别,有较高的识别率。基于颜色-纹理模型的MeanShift跟踪算法能解决过分依赖目标的颜色信息而导致的跟踪失败问题,本文算法跟踪效果良好。本文只研究了车辆的识别和跟踪,未涉及距离测量和碰撞预警,可在进一步研究中探讨。
1 金立生.高速公路汽车辅助安全换道模型.吉林大学学报:工学版,2009,39(3):582~586.
2 Wei H,Meyer E,Lee J,et al.Characterizing and Modeling Observed Lane-Changing Behavior:Lane-Vehicle-Based Microscopic Simulation on Urban Street Network.Transportation Research Record Journal of the Transportation Research Board,2000,1710(1):104~113.
3 Mar J,Lin H T.The car-following and lane-changing colli⁃sion prevention system based on the cascaded fuzzy infer⁃ence system.IEEE,2005,54(3):910~924.
4 李军,魏民祥.基于“蝇眼”传感网络的大型车辆防撞系统研究.农业装备与车辆工程,2012(3):3~6.
5 李守晓,毕欣.毫米波雷达汽车盲点检测系统研究与设计.机械设计与制造,2013(9):25~31.
6 Papageorgiou C,Poggio T.A Trainable System for Object Detection.International Journal of Computer Vision,2000,38(1):15~33.
7 Ojala T,Pietikianen M,Macnpaa T.Multiresolution Garyscale and Rotation Invariant Texture Classification with Local Binary Parrerns.IEEE Trans on Pattern Analysis and Machine Intelligence,2002,24(7):971~987.
8 沈洁.基于图像的前方车辆检测:[学位论文].南京:南京理工大学,2011.
9 冈萨雷斯.数字图像处理的Matlab实现.第2版.北京:清华大学出版社,2013.
(责任编辑 斛 畔)
修改稿收到日期为2016年10月18日。
Research on Algorithms of Identifying and Tracking Rear Side Vehicle Based on PreScan
Ge Ruhai1,Zhang Xuefeng1,Zhang Meijuan2
(1.Jiangsu University,Zhenjiang 212013;2.Wuxi Institute of Technology,Wuxi 214121)
In order to reduce the probability of collision when changing lanes,the identification and tracking algorithms of the rear side vehicle were analyzed and studied.Firstly,Haar-like feature calculation was accelerated by the method of integral image to detect the rear side vehicle combined with cascade classifier.Based on MeanShift theory,vehicle tracking was achieved with the combination of texture features and traditional color characteristics.The intelligent traffic simulation software PreScan was applied to build simulation models,and verify the validity of the algorithm.The results show that,the algorithm has higher recognition rate,can achieve real-time requirements and has good tracking effect.
Vehicle identification and tracking,Integral image,Simulation analysis
车辆识别与跟踪 积分图 仿真分析
U461.91;TP391 文献标识码:A 文章编号:1000-3703(2017)08-0032-06
