基于Matlab/Simulink的四轮转向车辆操纵稳定性仿真研究
2017-09-03姚广磊王保华
姚广磊 王保华
(湖北汽车工业学院汽车工程学院 湖北 十堰 442002)
基于Matlab/Simulink的四轮转向车辆操纵稳定性仿真研究
姚广磊 王保华
(湖北汽车工业学院汽车工程学院 湖北 十堰 442002)
本文借助于Matlab/Simulink工具,对采用两种经典控制方法的二自由度四轮转向车辆和二自由度传统前轮转向车辆进行了建模与仿真分析,仿真时以前轮转角作为输入,通过比较四轮转向车辆与传统前轮转向车辆的质心侧偏角、横摆角速度、侧向加速度角阶跃响应曲线,研究了这两种控制方法对四轮转向车辆操纵稳定性的影响。对比分析三个评价指标的响应曲线,结果表明该四轮转向车辆改善了低速转向时的轻便性和高速转向时的操纵稳定性。
四轮转向;两轮转向;二自由度;角阶跃输入;比例前馈;横摆反馈;操纵稳定性
引言
随着科技的进步现在交通系统获得了快速发展,使得人们对汽车速度的要求越来越高,同时要求汽车的快速反应能力也应相应地提高,而四轮转向技术正在被作为一种有效手段应用于改善汽车的操纵稳定性和机动性。所谓四轮转向是指汽车转向过程中,四个车轮可根据前轮或行车速度等信号同时相对车身偏转。四轮转向汽车的后轮可以与前轮同向偏转,也可以反向偏转。在中低速时,实现前后轮异向转向,减小转弯半径,提升汽车的机动性和灵活性;在高速时,通过前后轮同向转向,使汽车变道更加迅速,循迹跟踪能力增强,同时可以有效避免侧滑和甩尾现象的出现[1]。
四轮转向汽车的动态仿真对于改进转向系统的设计和评价汽车的操纵稳定性具有重要的意义。由于转向系统力学特性的复杂,传统利用微分方程和差分方程建模进行动态仿真的方法需要大量编程,工作量大、效率低、并且不能很好地满足仿真需要。Matlab中的Simulink工具箱可以方便地对四轮转向汽车操纵稳定性的动态特性进行仿真,因此可以根据车辆的动力学方程,利用simulink工具箱搭建4WS汽车动态仿真模型,验证和分析其操纵稳定性能。
一、四轮转向车辆的动力学模型
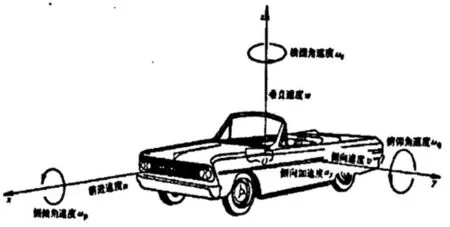
图1 车辆坐标系与汽车主要运动形式

图2 四轮转向汽车二自由度模型
我们在研究4WS汽车对转角输入的响应时,为了便于掌握稳定的基本特性,我们将将其简化为线性二自由度模型进行分析研究,分析中忽略转向系统的影响,以前、后轮转角作为输入,忽略悬架作用,认为汽车车厢只作平行于地面的平面运动,即汽车沿z轴的位移,绕y轴的俯仰角与绕x轴的侧倾角均为零,忽略其他方面的因素影响,车辆坐标系与汽车主要运动形式如下图1所示,最终便简化为一个两轮摩托车的模型,有两个有侧向弹性的轮胎支撑与地面具有侧向及横摆运动的二自由度汽车模型[2],如图2所示。
由牛顿矢量力学和牛顿第二定律,可以建立微分方程如下:
(1)
(2)
(3)
当后轮转角δr=0,且前轮转角δf≠0时,上述四轮转向二自由度模型变成两轮转向二自由度模型,此时微分方程如下:
(4)
(5)
式中:m—汽车等效质量,kg;vx—汽车前进车速,m/s;
vy—汽车质心速度在y轴上的分量,m/s;

r—横摆角速度,rad/s;β—车辆质心侧偏角,rad;
Iz—转动惯量,kg.m2;
Cαf、Cαr—前、后单个轮胎的侧偏刚度(正值),N/rad;
δf、δr—前、后轮转角,°;a1、a2—质心到前、后轴的距离,m;
L—轴距,m;
二、系统状态方程
(6)
(7)
其中A为状态矩阵,B为输入矩阵,C为输出矩阵,D为直接传递矩阵。
式中各个矩阵物理量为:
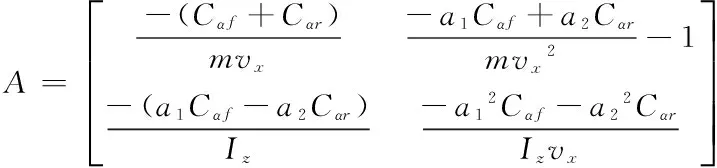

(8)
(9)
A1,B1,C1,D1代表的含义与4WS相同。
式中各个矩阵物理量为:
三、四轮转向车辆的控制策略
汽车的操纵稳定性是指在驾驶者不感到过分紧张、疲劳的情况下,汽车能够遵循驾驶者通过转向系统及转向车轮给定的方向行驶,且遇到外界干扰时,汽车能够抵抗干扰而保持稳定行驶的能力,汽车的操纵稳定性是汽车主动安全性的重要评价指标之一。而表征汽车操纵稳定性的评价指标主要有:横摆角速度、侧向加速度、质心侧偏角、侧倾角及转向力等物理量[3]。
目前,4WS汽车所采用的控制策略基本都是基于线性二自由度汽车模型,以质心侧偏角为0作为控制目标,以提高侧向稳定性,主要有两种经典控制方法:前轮比例前馈和横摆角速度比例反馈控制[4]。为了表明上述两种控制方法的效果,根据上式(8)和(9)在Simulink中建立传统的二轮转向车辆的仿真模型,如下图3所示,以前轮转角δf作为二自由度FWS车辆动力学模型的输入,以质心侧偏角、横摆角速度和侧向加速度作为输出,依据三个输出量的响应来表征传统FWS车辆的操纵稳定性。

图3 传统FWS车辆模型
(一)前轮比例前馈控制方法

(10)
在Simulink中建立四轮转向前轮比例前馈控制的仿真模型,如下图4所示,以前轮转角δf和后轮转角δr=kδf作为二自由度4WS车辆动力学模型的输入,以质心侧偏角、横摆角速度和侧向加速度作为输出,依据三个输出量的响应来表征前轮比例前馈控制的4WS车辆的操纵稳定性。

图4 比例前馈控制的四轮转向模型
(二)横摆角速度比例反馈控制方法
(11)
根据上述控制方法,在Matalb/Simulink中建立四轮转向横摆角速度比例反馈控制的仿真模型,如下图5所示,以前轮转角δf和后轮转角δr=krr作为二自由度4WS车辆动力学模型的输入,以质心侧偏角、横摆角速度和侧向加速度作为输出,依据三个输出量的响应来表征横摆角速度比例反馈控制的4WS车辆的操纵稳定性[5]。

图5 横摆角速度比例反馈控制的四轮转向模型
四、Simulink模型仿真与结果分析
汽车操纵稳定性可以通过角阶跃输入试验、正弦输入试验、移线试验、蛇形试验等来评价,为了研究的方便性,本文只探讨了角阶跃输入试验[11],同时将使用上述两种控制方法的4WS车辆模型与传统的FWS模型进行了对比分析,车辆动力学模型的仿真参数如下表1所示。
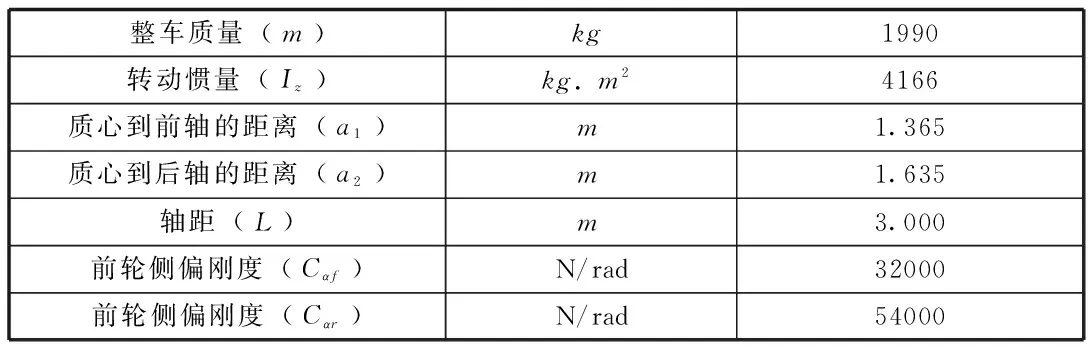
表1 车辆动力学模型的仿真参数
在上述角阶跃试验中,前轮转角的阶跃信号幅值为20°,在0.5s时开始起跃,用vx=10km/h模拟汽车的低速行驶工况,用vx=80km/h模拟汽车的高速行驶工况,对传统的二轮转向车辆模型、比例前馈控制和横摆角速度比例反馈控制的四轮转向车辆模型进行仿真,得到了低速工况和高速工况下车辆操纵稳定性三个评价指标的相应曲线,其中低速与高速质心侧偏角曲线如图6所示,低速与高速横摆角速度曲线如图7所示,低速与高速侧向加速度曲线如图8所示。
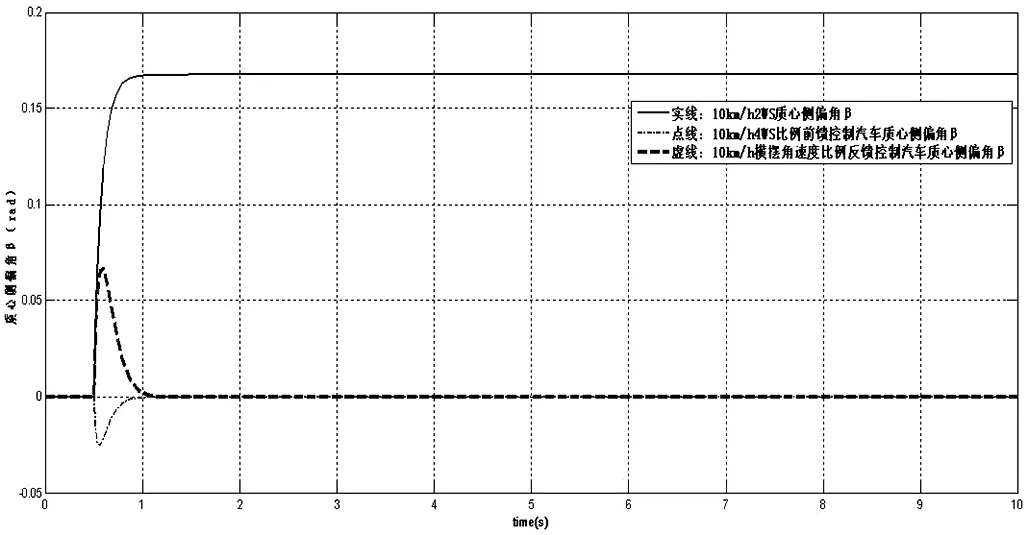

图6 10km/h与80km/h质心侧偏角的阶跃响应
由图6可见,无论低速还是高速,前轮转角比例前馈和横摆角速度比例反馈控制的4WS车辆的质心侧偏角经过小幅度的波动后都可以迅速达到质心侧偏角为零的稳态,满足控制目标要求,其稳态值明显小于传统FWS车辆的质心侧偏角,因此这两种控制方法提升了汽车的循迹能力和行驶稳定性。车速相同时,前轮转角比例前馈控制方法的质心侧偏角波动幅值小于横摆角速度比例反馈控制的波动幅值。
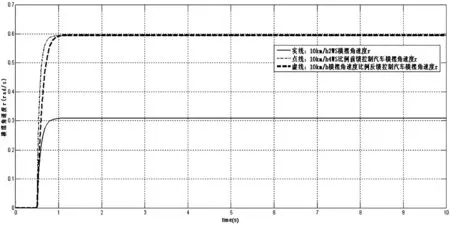
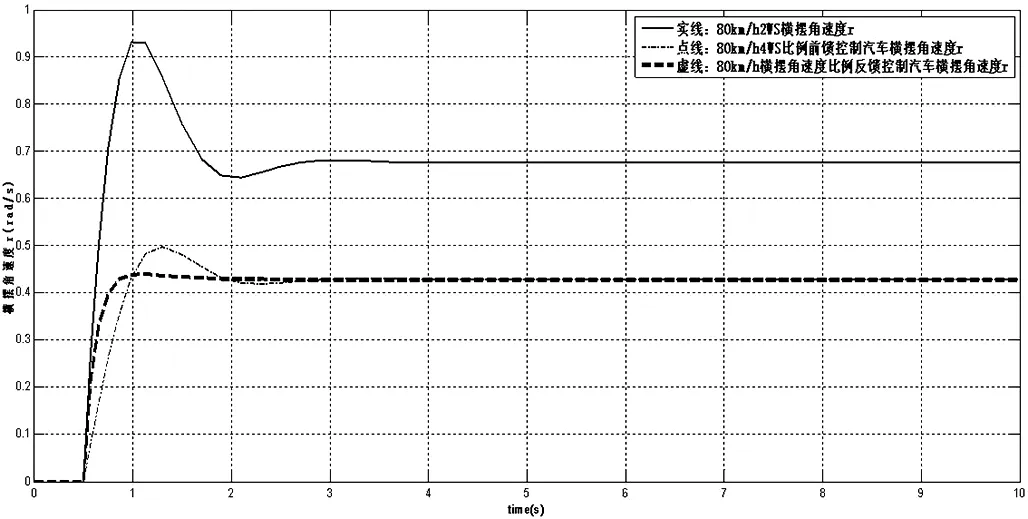
图7 10km/h与80km/h横摆角速度的阶跃响应


图8 10km/h与80km/h侧向加速度的阶跃响应

从图8可见,侧向加速阶跃响应曲线与横摆角速度阶跃响应曲线的变化趋势基本相同,在低速工况时,采用前轮转角比例前馈控制和横摆角速度比例反馈控制的4WS车辆的侧向加速度大于传统FWS车辆的侧向加速度,而在高速工况时,4WS车辆的侧向加速度小于FWS车辆的侧向加速度,由计算公式R =vx2/ay得,车速相同时,随着侧向加速度增大,转弯半径R减小,反之增大。这在一定程度上保证了车辆低速转向时的机动性和操纵轻便性,也改善了高速转向时的操纵稳定性,但是也会使高速转向时产生过多的不足转向,不利于操稳性的提升,同时,采用这两种方法的4WS车辆的侧向加速度经过小幅度的波动后,最终达到相同的稳态值,与横摆角速度不同的是,随着车速的减小,波动越剧烈。
五、结论
首先利用系统动力学方法得到了4WS车辆与传统FWS车辆的微分方程,并以前轮转角为输入,操稳性的三个评价指标为输出,将微分方程转化成状态方程;其次,以质心侧偏角为零作为控制目标,在Matlab/Simulink环境中分别建立前轮转角比例前馈控制模型、横摆角速度比例反馈控制模型和传统FWS车辆模型,实现三个模型在高速和低速工况下的角阶跃输入仿真。通过仿真对比分析可以看出,采用上述两种经典控制方法的4WS车辆相比于传统FWS车辆,在一定程度上改善了低速转向时的轻便性和高速转向时的操纵稳定性,是4WS车辆主动控制方向的两种较为经典且实用的方法,但同时也存在一定的不足,高速工况下,横摆角速度和侧向加速度稳态值减小量过大,容易造成过多的不足转向,不仅增加了驾驶员的负担,而且不利于车辆的紧急转向或换道行驶。可以使用更加复杂的现代控制方法(如神经网络控制、模糊控制等)来弥补上述两种控制方法的不足。
[1]边明远.汽车四轮转向(4WS)技术及其发展前景[J].世界汽车.1999(12)
[2]余志生.汽车理论(第四版)[M]:机械工业出版社,2006.
[3]喻凡,林逸.汽车系统动力学[M]:机械工业出版社,2005.
[4]冯樱,邓召文,高伟.基于联合仿真的四轮转向汽车控制策略研究[J].重庆交通大学学报:自然科学版,2010,29(6):998-1001.
[5]施国标,于蕾艳,林逸.四轮线控转向横摆角速度反馈控制策略研究[J].系统仿真学报,2008(02):506-508.
[6]屈求真,刘延柱.四轮转向汽车的控制策略[J].汽车技术.1999(02)
[7]郭孔辉,轧浩.车辆四轮转向系统的控制方法[J].吉林工业大学学报.1998(04).
[8]羊玢,陈宁,田杰,马梁,张晨强.基于比例控制的4WS汽车操纵稳定性仿真研究[J].北京理工大学学报.2013(08).
[9]Kawakami Hirosi Sato Hiroki Et Al.Development of integrated system between active control suspension,active 4WS,TRC and ABS[J].SAE,1992
[10]杜峰.基于线控技术的四轮主动转向汽车控制策略仿真研究[D]:长安大学,2009.
[11]周 佳.四轮转向系统控制策略对比研究[D].北京理工学,2015.
[12]张乔.线控转向系统控制策略研究[D]:武汉科技大学,2012.
湖北汽车工业学院中青年人才项目(Q20171803)。
姚广磊(1989-),男,河南周口人,硕士生,从事商用车多桥转向的研究。
