双馈风力发电系统的低电压穿越运行研究与仿真
2017-08-31王晓雷杨合恒柴欣赵倩李志霞
王晓雷 杨合恒 柴欣 赵倩 李志霞
(中原工学院)
双馈风力发电系统的低电压穿越运行研究与仿真
王晓雷 杨合恒 柴欣 赵倩 李志霞
(中原工学院)
随着分布式风电场的大量并网运行,由于电网故障而造成发电机组的不稳定运行问题亟待解决。为了分析和解决三相短路故障而造成的风电机组的脱网运行,提出采用矢量控制和励磁控制相结合的方法,通过在变换器的交流侧设置电流阈值来监控转子侧电流的增加,并以总装机容量为9MW的双馈风力发电机系统模型为对象,在Matlab2016b /Simulink下搭建实时仿真模型进行验证。仿真结果表明该方法可以减小转子电流在故障发生瞬间的幅值,并且实现故障下的穿越运行。
双馈风力发电机;励磁控制;电流阈值
0 引言
随着经济全球化的形成,能源的消耗也在逐年增加,尤其以煤炭、石油和天然气最为突出,在人类大量开采和利用自然资源的同时也给地球带来了巨大的环境问题,诸如地表变暖、酸雨、地表塌陷和雾霾天气等[1]。为了更好地解决环境污染问题,国家电网公司董事长刘振亚先生提出了“全球能源互联网”的战略构想,该战略提出实施“两个替代”,即清洁替代和电能替代。其中清洁能源主要有:太阳能、风能、水能和潮汐能等,风能作为一种清洁能源,近年来得到了巨大的开发和利用,其中双馈感应发电机因其具有变速恒频、转子侧馈能、功率因数可调、变频器容量小等优点[2],在分布式风力发电系统中得到了大量的运用。
在风力发电的历史上,曾经出现过较大的事故,其中以2006年欧洲电网发生大面积停电最为严重。这次事故发生的原因是:电网发生故障时,风电机组出现大量脱网运行,导致系统潮流的大幅变化,进而引起大面积停电。如果风力发电机组在故障发生时,能够继续运行一段时间,并且参与系统潮流和功率的调节,则认为系统可以实现低电压下的穿越运行。这样的运行方式可以减小经济损失,提高系统的可靠性和鲁棒性。
本文采用基于电流前馈解耦的矢量控制方法,对交-直-交变流器各部分进行独立的矢量控制,通过在转子侧变流器的交流侧设定电流阈值来控制电流的增大,励磁电流控制定子侧有功、无功功率的输出;通过使网侧变流器工作于STATCOM模式,给予电网无功功率支撑。在Matlab2016b/Simulink环境下搭建仿真模型,通过对仿真结果的分析,证实了这种方法的可行性。
1 分布式双馈风力发电系统拓扑图
图1为分布式双馈风力发电系统拓扑图。系统由五大部分组成:风力机,变速齿轮箱,发电机组,双PWM变流器及并网隔离变压器。风力机可以根据风的流向,调整叶片姿态实现变桨运行,提高风能的利用效率;齿轮箱主要将低速转化为高速并传递能量;发电机为绕线式结构;双PWM变流器按背靠背方式连接。其中双PWM变流器,根据其连接位置的不同,将与定子侧相连的变流器称为网侧变流器(即GSC),将与转子侧相连的变流器称为转子侧变流器(即RSC)。转子侧变流器的功能有:为发电机提供交流励磁,通过对交流励磁电流幅值、频率、相位的控制,可以实现定子侧输出电压的稳定;通过矢量控制实现发电机的有功、无功功率独立调节[3]。网侧变流器的功能有:稳定电容两端的电压;产生无功功率供给电网;传输滑差功率至电网。
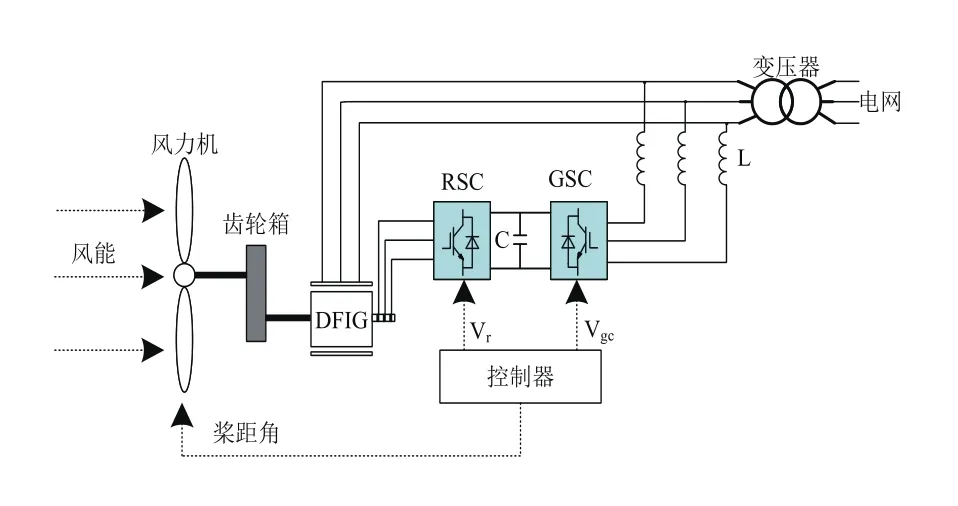
图1 分布式双馈风力发电系统拓扑图
2 双馈风力发电系统变流器的数学模型
2.1 网侧变流器在同步旋转坐标系下的数学模型
设系统为三相无中线系统,忽略线间阻抗,在电压平衡的条件下,根据坐标变换理论及瞬时功率理论,网侧变换器输出至电网的有功功率、无功功率为:

选取电网电压向量的方向为d轴方向,则uq=0,将上式化简为:

系统采用电流前馈解耦的控制策略[4],则解耦后的网侧输出电压ucd和ucq为:
式中,Kpin为内环PI控制器的比例增益;Tin为内环PI控制器积分时间常数;由以上数学模型建立起基于电流前馈解耦的网侧变流器矢量控制系统,其结构如图2所示。
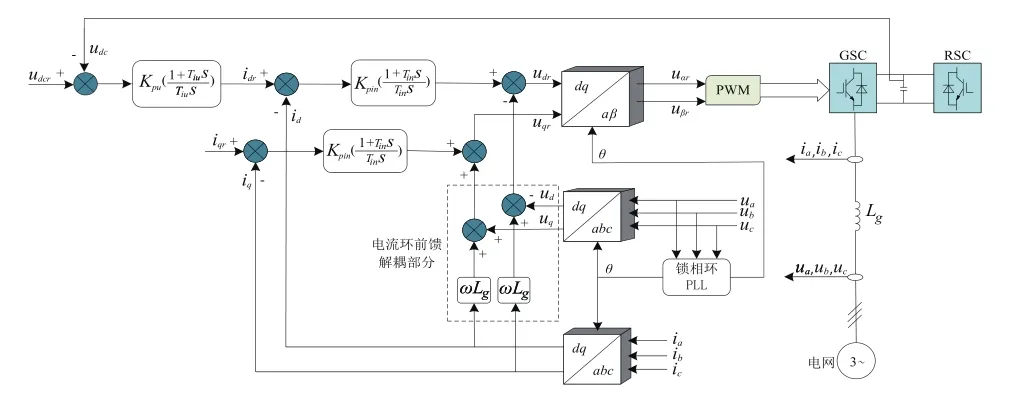
图2 基于电流前馈解耦的网侧变流器矢量控制系统结构
2.2 转子侧变流器在同步旋转坐标系下的数学模型
设定子电阻远小于定子绕组电抗,因此在双馈感应电机的T型等效电路模型中,可以忽略定子电阻,采用定子磁链定向的方法对发电机的输出功率进行解耦控制,根据坐标变换理论及瞬时功率理论,定子侧输出的有功功率、无功功率为:
由此可得,在定子磁链定向方式下,因为idr与iqr不存在耦合关系,所以可以对输出功率进行单独控制,即转子电流q轴分量iqr可以控制定子侧有功功率Ps输出,电流d轴分量idr可以控制定子侧无功功率Qs输出,这就是双馈感应电机定子侧有功、无功功率的解耦控制。由此根据发电机的特点及其数学模型,画出基于前馈解耦的转子侧变流器矢量控制系统,其结构如图3所示。
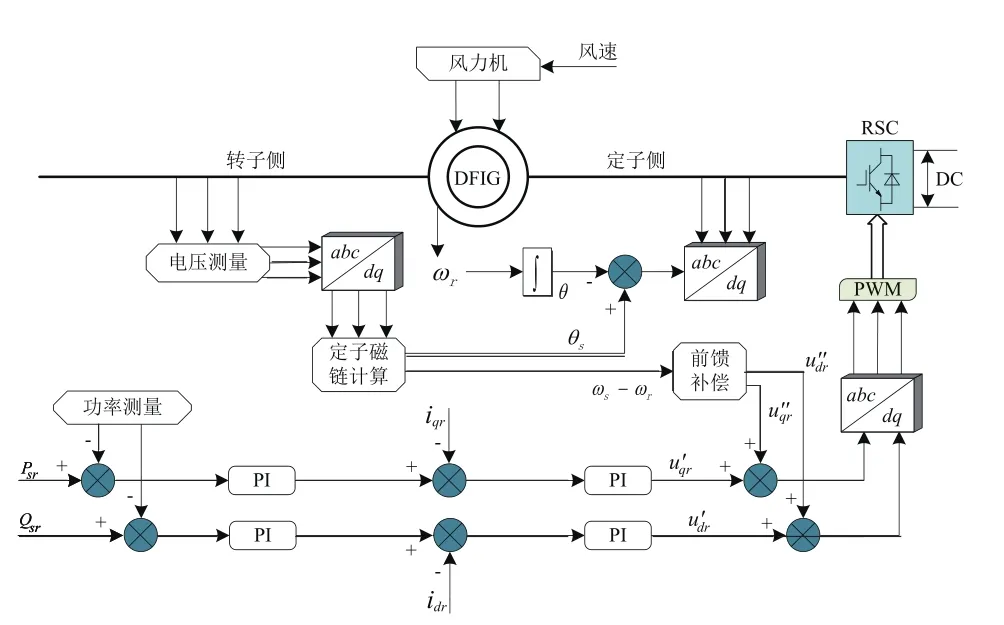
图3 基于前馈解耦的转子侧变流器矢量控制系统结构
3 控制策略
在双馈风力发电系统正常运行时,网侧变流器工作于单位功率因数模式,其主要任务是维持直流母线电压的稳定,并且传输转子侧变流器产生的滑差功率。在电网发生三相短路故障时,电网出现无功功率缺口,以往的做法是在网侧变流器附近并入STATCOM进行动态补偿,这种补偿方法虽然有效,但是增加了设备的投入和控制系统的复杂性。经过研究发现网侧变流器可以用于控制无功功率并提高风力发电机的总无功功率支撑能力[5],相比较以往的动态补偿措施,这种方法更为实用。
文中网侧变流器采用基于电流前馈解耦的矢量控制策略,故障发生时,网侧变流器工作于STATCOM模式,相当于一个动态控制的无功功率源,此时输送入电网的无功功率由定子侧和网侧变流器发出的无功组成,用数学表达式可以表示为:

式中,Q为输送至电网总的无功功率;QS为定子侧输出无功功率;QGSC为网侧变流器输出无功功率。
转子侧变流器正常工作时,主要为发电机提供交流励磁,控制定子侧功率的输出以及向网侧传输滑差功率。在电网出现故障时,定子磁链中会产生直流分量,由于定转子磁场的相互作用,转子侧会受到不利影响,甚至出现过电压、过电流,这种不利影响必须控制在一定范围内,否则会触发继电器动作,进而出现脱机现象。通过分析故障发生时,发电机内部电磁变量的暂态特点,可以控制发电机漏磁链以抵消定子磁链中的暂态直流分量对转子侧的影响[6]。本文根据文献[6]所提出的理论基础,提出在转子侧设定电流阈值,当电流超过设定的阈值,就产生与之方向相反的量,这样就减弱了转子侧电流。
4 系统仿真
4.1 系统仿真模型
根据上文的数学模型和控制策略搭建系统的仿真模型如图4所示,模型由6个1.5MW的双馈风力发电机组成,装机容量为9MW,系统主要参数如下表所示。在仿真设置中,风速保持在15m/s,风电机组产生的无功功率调节为0Mvar,离散模型的采样时间Ts=5μs,可以在模型属性的初始函数中设置。在120kV的可编程电源中,可以设置电压跌落,该实验设置t=0.03s时,电网产生0.5倍的电压跌落,经过0.1s后供电恢复跌落前的状态。
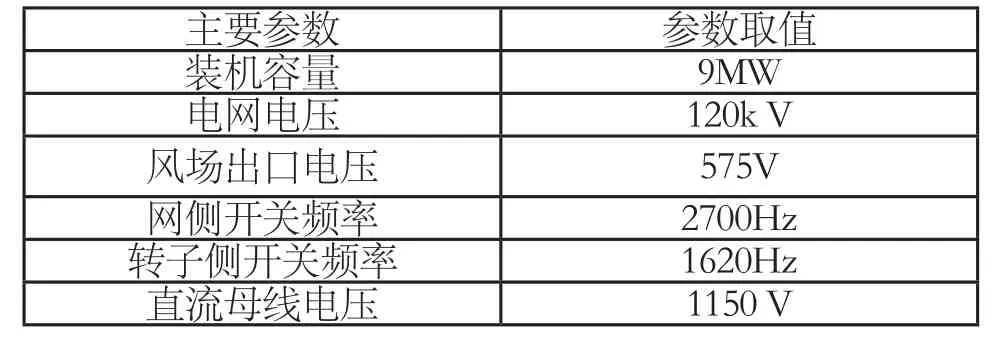
表 系统主要参数
4.2 仿真验证和分析
图5a为电网电压波形(电压为标幺值),可以看出电网电压的跌落使得波形发生了畸变,在控制器的作用下,一段时间后稳定在跌落后的电压等级;图5b为故障发生时风电场出口电压变化曲线,可以看出电压是逐渐减小的,电压骤降的瞬间跌幅没有电网电压大,这是因为传输线上的阻抗对故障电压的缓冲作用。通过励磁控制,大约经过四个周期风电场出口电压得到稳定。
图5c为电网电流波形(电流为标幺值),可以看出电网电流迅速增大并且出现震荡,受此影响,风电场出口电流也出现了迅速增大如图5d所示。通过对转子侧变换器的控制,电流增加得到抑制,大约经过四个周期电流被稳定在正常范围之内。
图5e为风电场输出有功功率波形,由于电压跌落瞬间转子侧电流的增大,所以输出有功功率有所增加,但由于电压总体呈现跌落,所以风电场的输出有功功率下降。图5f为无功功率曲线,故障发生时电网出现无功功率缺口,电网所需无功功率,由网侧变流器和定子侧共同供给。
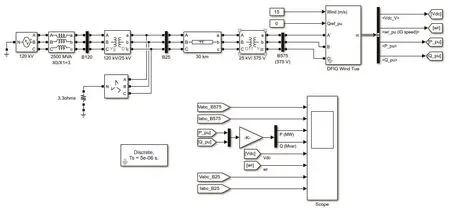
图4 分布式风电场并网运行仿真模型
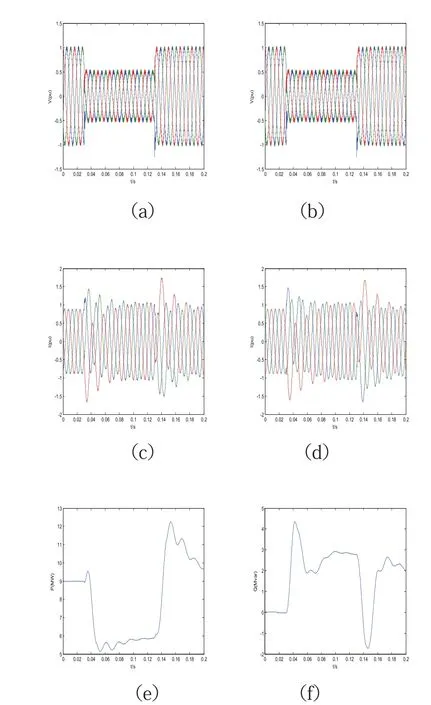
图5 系统主要参数变化曲线
5 结束语
Matlab仿真结果表明,基于定子磁链定向的矢量控制与合理的励磁控制相结合,可以实现双馈风力发电机的低电压穿越运行,从而保证了系统的稳定运行。
[1] 车一鸣. 浅析全球能源互联网[J]. 科技视界,2015(31).
[2] 胡家兵,孙丹,贺益康,等. 电网电压骤降故障下双馈风力发电机建模与控制[J].电力系统自动化,2006,30(8):21-26.
[3] 王毅,朱晓荣,赵书强. 风力发电系统的建模与仿真[M]. 1版. 北京:中国水利水电出版社,2015.
[4] 李正熙,郑春雨,樊生文. 风力发电并网逆变器的前馈解耦控制[J].北方工业大学学报,2011,23(1):56-59.
[5] 温春雪,胡长斌,朴正国,等,译. 风力发电并网运行的无功管理[M]. 1版. 北京:机械工业出版社,2014.
[6] 向大为,杨顺昌,冉立. 电网对称故障时双馈感应发电机不脱网运行时励磁控制策略[J].中国电机工程学报,2006,26(10):130-135.
2017-03-03)
