利用高分影像与特征匹配算法标定滑坡位移场
2017-08-30张慧慧
张慧慧,王 茹
(1. 东北大学资源与土木工程学院,辽宁 沈阳 110819; 2. 辽宁省交通高等专科学校测绘系,辽宁 沈阳 110122)
利用高分影像与特征匹配算法标定滑坡位移场
张慧慧1,2,王 茹1
(1. 东北大学资源与土木工程学院,辽宁 沈阳 110819; 2. 辽宁省交通高等专科学校测绘系,辽宁 沈阳 110122)
滑坡灾害是世界上破坏力极大的自然灾害之一,滑坡监测是预防滑坡灾害的重要基础。针对SIFT算法在滑坡遥感监测应用中存在特征点数量少、分布不均的问题,提出了一种将ASIFT算法和CSIFT算法相结合进行滑坡位移场标定的方法,即利用ASIFT处理全色影像,利用CSIFT处理多光谱融合影像,将两种方法提取的互不相同的特征点叠加综合得到更多的特征匹配点。该方法在露天矿滑坡的应用结果表明:与SIFT算法相比,新改进的方法大幅度增加了特征点数量,提高了滑坡位移场标定精度,且成本低、效率高,非常适合于大型滑坡后期大变形场监测。
高分影像;ASIFT算法;CSIFT算法;滑坡位移场;标定
滑坡灾害是同地震和火山相并列的全球性3大地质灾害之一,其影响范围广泛,严重威胁和损害国家生产建设和人民的生命财产安全。减少滑坡灾害的重点在于滑坡预警,而滑坡变形监测是滑坡预警的重要基础。
目前,滑坡变形监测方法主要包括GPS观测法[1]、InSAR技术[2]、三维激光扫描技术[3]等。但这些方法各自具有优势,同时又存在一定的缺点。近几年,随着高分辨率遥感影像技术的快速发展,遥感影像能更准确地提供地表和地表物体的空间信息,使得宏观监测地表变化成为可能[4-7],这也为滑坡变形监测提供了新的思路。一些学者利用高分辨率遥感影像进行了滑坡变形监测方面的相关研究。如Perotto-Baldiviezo等应用SPOT全色影像结合1∶50 000航片,解译出滑坡的覆盖范围、坡度、坡向等灾害信息[8];邓辉等利用QuickBird影像提取了滑坡各要素,准确地识别出了滑坡,并对滑坡的潜在危险性进行了评价和分析[9];Delacourt等于2004年基于多幅不同时间QuickBird影像,并结合相关系数法计算滑坡位移情况,对每年位移量在2.5~20 m的滑坡运动进行了制图[10];Liu Shanjun等利用Pleiades高分辨率全色遥感影像,并结合SIFT算法,提取了两期遥感影像上的同名点并计算其位移量,获得了滑坡位移场[11]。
上述表明,利用高分遥感影像可以进行滑坡变形监测,尤其是结合图像匹配算法可以实现滑坡位移量的计算,但相关系数法在影像的低对比度区域或相关系数较低情况下,位移量不易计算;基于SIFT算法虽然取得了一定的效果,但位移精度仍不够理想。因此,本文提出将ASIFT和CSIFT两种特征匹配算法相结合进行大变形滑坡位移场的标定方法,通过ASIFT和CSIFT分别对抚顺西露天矿两期不同时相全色影像和多光谱融合影像的特征点进行提取与图像匹配,得到更多的特征匹配点,以提高露天矿滑坡位移场的标定精度。
1 研究区概况与数据选取
1.1 研究区概况
研究区位于辽宁省抚顺市西露天煤矿,该矿为亚洲第一大露天煤矿,其矿坑长6.6 km,宽2.2 km,深度近500 m。随着矿坑不断向深部开采,矿坑南北帮已经多次出现滑坡。2008年以来,南帮千台山区域逐渐形成了一条长约3100 m的地裂缝,到2014年,地裂缝的最大宽度达40 m,最大落差超过18 m,3个城市测量控制点不断北移,因此,对西露天矿坑南帮边坡的监测和治理工作已刻不容缓。
1.2 数据选取
本文使用的遥感影像数据为Pléiades卫星的高分辨率全色和多光谱影像,其中全色影像的波段为480~830 nm,多光谱数据分别为蓝波段430~550 nm、绿波段490~610 nm、红波段600~720 nm和近红外波段750~950 nm。为提取滑坡的位移场,选取2013年、2014年的两期影像进行了位移场变化计算,具体参数见表1。遥感影像正射校正的DEM数据是利用30 m分辨率的Aster GDEM数据重采样生成的[11]。

表1 高分辨率遥感影像数据
2 滑坡位移场标定方法
2.1 遥感影像预处理
本文遥感影像预处理主要包括正射校正、影像融合、影像配准、影像裁剪等。
影像融合时,遵循融合后的图像信息量最大化原则,即标准差越大,图像信息量越大;相关系数越小,各波段独立性越强。根据标准差和相关系数计算结果,多光谱数据选取蓝色波段、红色波段和近红外波段。将全色影像与多光谱的蓝色波段、红色波段、近红外波段进行融合,融合前的全色影像和融合后的多光谱影像如图1和图2所示。
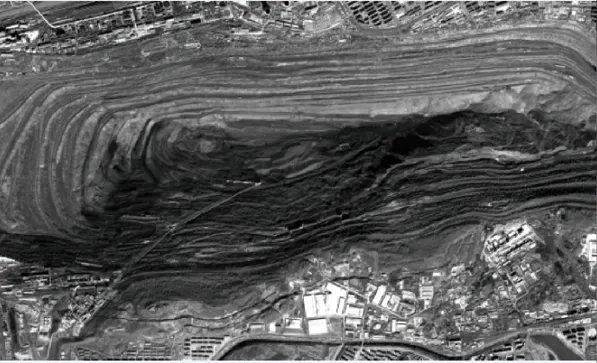
图1 全色影像

图2 融合影像
2.2 遥感影像匹配
目前常用的特征匹配算法主要包括SIFT算法、ASIFT算法和CSIFT算法。SIFT算法为Lowe教授于1999年提出并于2004年丰富完善的尺度不变特征变换算法[12],具有旋转、平移、尺度缩放不变性。
ASIFT算法是对SIFT算法的改进,是一种具备完全仿射不变性的特征提取算法[13-14]。ASIFT算法在完全尺度不变性的基础上,又增加了经度角和纬度角两个不变特性,用来描述相机的视角变化。其实现过程包括4个步骤:①仿射模拟:模拟相机的仿射畸变,获得模拟图像;②特征点检测:构建尺度空间,检测局部极值获得特征点;③特征点描述:采用128维特征描述子描述特征点及特征点周围对其有贡献的像素点的相关信息;④特征向量匹配:利用最邻近法找出相互匹配的特征点对。
CSIFT算法也是对SIFT算法的改进,其主要是针对彩色影像匹配的算法[15]。CSIFT算法的实现思路是先对影像提取颜色不变量,建立颜色不变量模型,然后将颜色不变量代替灰度信息进行SIFT算法处理,具体步骤为:①提取颜色不变量:根据描述物体光谱辐射特性的K-M理论提取颜色不变量;②特征点检测;③特征点描述;④特征向量匹配。
根据SIFT、ASIFT和CSIFT特征匹配算法特点,本文在Matlab平台上实现了利用SIFT算法和ASIFT算法分别处理全色影像,利用CSIFT算法处理融合影像。
2.3 滑坡位移量计算
在对滑坡不同时相的两期影像进行特征点匹配后,接下来利用特征匹配点进行位移场标定。由于特征点在不同时相的遥感影像中发生了移动,因此将两幅影像特征点在像方坐标系中的坐标作差,便可求出特征点在滑坡滑动期间的位移量。具体做法为:计算两幅影像特征点之间的像素个数,然后与单个像素所代表的实地距离相乘以得到特征点的位移量。
3 结果分析
图3—图5为3种算法提取特征匹配点的位移矢量图,图中箭头底端位置代表特征点位置,箭头的指示方向代表滑动方向,箭头的长度代表滑动位移的大小。图3为SIFT算法处理全色影像提取特征匹配点的位移矢量图,图4为ASIFT算法处理全色影像提取特征匹配点的位移矢量图,图5为CSIFT算法处理融合影像提取特征匹配点的位移矢量图。

图3 SIFT算法提取的位移矢量

图4 ASIFT算法提取的位移矢量

图5 CSIFT算法提取的位移矢量
从图3—图5中可以看出,与SIFT算法相比,ASIFT特征匹配点数量明显提高,CSIFT算法匹配点数量略少。这主要是由于ASIFT算法具有完全仿射不变性,因此在匹配性能上有所提升。而CSIFT算法处理彩色融合影像过程中也提取到很多特征点,但由于两期影像间隔长,色彩变化大,特征点描述子之间的差异很大,造成很多特征点无法匹配,因此特征匹配点数量少。
表2统计了3种算法分别提取的特征匹配点数量。从表2中可以看出,使用SIFT处理全色影像共获得253个匹配点,使用ASIFT处理全色影像共获得979个匹配点,使用CSIFT处理融合影像共获得38个匹配点。其中SIFT提取的253个匹配点与ASIFT算法提取的特征点都基本相同或接近,而CSIFT提取的匹配点都是相异的特征点。这表明利用ASIFT算法与CSIFT算法进行图像匹配获得的特征点是不同的,这是由于CSIFT处理融合影像的颜色不变量信息与ASIFT处理全色影像的灰度信息不同,使检测到的特征点及特征点描述子的信息不同,最终匹配到不同的特征点。

表2 3种算法分别提取的特征匹配点数量 个
因此,可以将ASIFT和CSIFT两种算法提取的互不相同的特征点叠加综合,进行滑坡位移矢量标定,如图6所示。

图6 改进方法的位移矢量
4 精度评价
为了对本文方法的精度进行正确评价,将SIFT算法处理结果、CSIFT和ASIFT两种算法叠加综合处理结果分别与研究区内的3个GPS监测点结果进行对比,见表3和表4。
通过表3和表4结果比较可以看出,与SIFT算法相比,新改进的方法位移精度提高幅度很大,其精度适用于较大型滑坡位移场的监测。

表3 SIFT算法处理结果与GPS监测结果对比 m

表4 两种算法叠加综合结果与GPS监测结果对比 m
5 结 论
针对利用SIFT算法进行滑坡监测存在的问题,提出了利用ASIFT算法和CSIFT算法相结合提取两期高分遥感影像上滑坡位移场的方法,并将该方法在露天矿的滑坡位移监测应用效果进行了分析:
(1) 由于ASIFT、CSIFT两种算法提取特征点完全不同,可以相互补充,因此将两种算法提取的特征点叠加综合,获取了更多的特征匹配点。
(2) 与SIFT相比,新改进方法提高了位移场标定精度,圈定的滑坡位移场范围更加细致准确,为滑坡监测与预警提供了更可靠的依据,且成本低,操作简便、效率高,非常适合于较大变形滑坡的空间位移场监测。
[1] 王利.地质灾害高精度GPS监测关键技术研究[J].测绘学报,2015,44(7):826.
[2] SUN Q, ZHANG L, DING L,et al. Slope Deformation Prior to Zhouqu, China Landslide from InSAR Time Series Analysis [J]. Remote Sensing of Environment, 2015,156(1):45-57.
[3] SAGID G,BALAZS S,ANDREAS R,et al. Landslide Displacement Monitoring Using 3D Range Flow on Airborne and Terrestrial Lidar Data [J]. Remote Sensing, 2013, 5(6): 2720-2745.
[4] 陈华,邓喀中,张以文,等.结合SIFT和RANSAC 算法的InSAR影像配准[J].测绘通报,2015(12): 30-34.
[5] 常青,张斌,邵金玲.基于SIFT和RANSAC的特征图像匹配方法[J].华东理工大学学报(自然科学版),2012,38(6):747-751.
[6] 戴激光,宋伟东,李玉.渐进式异源光学卫星影像SIFT匹配方法[J].测绘学报,2014,43(7):746-752.
[7] 赵朝贺,杨化超,张磊,等.一种大角度亚像素的图像自动配准算法[J].测绘通报,2014(8):30-35.
[8] PEROTTO-BALDIVIEZO H L,THUROW T L,SMITH C T, et al. GIS Based Spatial Analysis and Modeling for Landslide Hazard Assessment in Steep Lands, Southern Honduras[J]. Agriculture, Ecosystems & Environment, 2004,103(1): 165-176.
[9] 邓辉,巨能攀,向喜琼.高分辨率卫星遥感数据在白衣庵滑坡调查研究中的应用[J].地球与环境,2005,33(4):96-100.
[10] DELACOURT C,ALLEMAND P,CASSON B, et al. Velocity Field of the “La Clapière” Landslide Measured by the Correlation of Aerial and Quick Bird Satellite Images[J].Geophysical Research Letters,2004, 31(15): 1-5.
[11] LIU S J,WANG H, HUANG J W,et al. High-resolution Remote Sensing Image Based Extensive Deformation Induced Landslide Displacement Field Monitoring Method[J]. Int J Coal Sci Technol, 2015,2(3):170-177.
[12] LOWE D G. Object Recognition from Local Scale-Invariant Features [C]∥Proceedings of the Seventh IEEE International Conference on Computer Vision. Corfu:IEEE Computer Society,1999.
[13] 肖雄武,郭丙轩,李德仁,等.一种具有仿射不变性的倾斜影像快速匹配方法[J].测绘学报,2015,44(4):414-420.
[14] MOREL J M,YU G. ASIFT: A New Framework for Fully Affine Invariant Image Comparison[J]. SIAM Journal on Imaging Sciences, 2009, 2(2): 438-469.
[15] ABDEL-HAKIM A E,FARAG A A. CSIFT: A SIFT Descriptor with Color Invariant Characteristics[C]∥IEEE Computer Society Conference on Computer Vision and Pattern Recognition. New York:IEEE Computer Society,2006.
Calibrating Landslide Displacement Field by Using High-resolution Image and Feature Matching Algorithm
ZHANG Huihui1,2,WANG Ru1
(1. College of Resources and Civil Engineering, Northeastern University, Shenyang 110819, China;2. Surveying and Mapping Department of Liaoning Provincial College of Communications, Shenyang 110122, China)
Landslide hazard is one of the most destructive natural disasters in the world. Landslide monitoring is an important foundation for preventing landslide hazard. In view of the problem that feature points extracted by SIFT which is applied to landslide remote sensing monitoring is few and uneven distribution, a new improved method of calibrating landslide displacement field which uses ASIFT to process panchromatic images and CSIFT to process multi-spectral fusion images is proposed. This method can combine the different feature points extracted from ASIFT and CSIFT to get more feature matching points. The results show that compared with the SIFT algorithm, this method greatly increases the number of feature points and improves the calibration precision of the landslide displacement field. It has the advantages of low cost and high efficiency, and is very suitable for large scale large deformation field monitoring in later stage of landslide.
high-resolution image;ASIFT algorithm;CSIFT algorithm;landslide displacement field;calibration
张慧慧,王茹.利用高分影像与特征匹配算法标定滑坡位移场[J].测绘通报,2017(8):41-44.
10.13474/j.cnki.11-2246.2017.0251.
2016-12-14;
2017-03-10
国家自然科学基金(41440032;41074127);国家重点基础研究发展计划(973)项目(2011CB707102)
张慧慧(1982—),女,博士生,副教授,主要从事测绘遥感教学与科研工作。E-mail:zhanghuihui1982@163.com
P23
A
0494-0911(2017)08-0041-04