无人机通用指控平台设计与实现
2017-08-30王泓淼
刘 惠,王泓淼,胡 楠,颜 华
(1.国家海洋技术中心,天津 300112;2.天津航天中为数据系统科技有限公司,天津 300301)
无人机通用指控平台设计与实现
刘 惠1,王泓淼2,胡 楠1,颜 华2
(1.国家海洋技术中心,天津 300112;2.天津航天中为数据系统科技有限公司,天津 300301)
现有不同型号无人机的数据协议格式差别较大,无人机指挥控制系统与无人机紧密耦合,针对不同机种要开发不同的指控系统,系统的通用性较差,开发、培训成本高,且无法满足未来多无人机协同作业的任务需求;因此,设计开发一套具有较高通用性的无人机指控系统,通过对异构的无人机测控数据进行通用化处理,形成具有较强可扩展性的无人机标准数据协议,用以消除不同无人机与指控系统之间的差异性,同时最大限度的保证指控平台的可扩展能力。
无人机;通用化;指挥控制;数据协议
0 引言
随着无人机应用的逐渐深入,无人机种类和数量都在不断增多,随之暴漏出来的问题也日益凸显。一方面,国内外各型无人机系统接口形式多样,数据协议格式差别较大,现有技术都是按照无人机原始数据协议进行透明传输,对后期的数据解析与应用带来许多不便;另一方面,现有无人机平台仅能通过各厂商自有系统进行分散监控,无人机平台与指控系统的紧密耦合,导致系统的通用性、可扩展性较差,针对新机种要开发新的指控系统,开发、维护、培训的成本较高,无法满足无人机业务不断发展的需求。
北约在2003 年制定了“北约无人机控制站互操作标准化接口”(STANAG 4586 标准)[1-3],以提高无人机系统在北约盟军联合作战中的互操作能力。目前,国外在实现无人机系统通用化方面主要是以北约制定的STANAG 4586协议为标准,该标准是北约部队使用的一种无人机通用地面站系统的规格说明,以使北约各成员国可以应用各自无人机系统联合支持军事作战行动,该种通用化是建立在应用同种数据协议标准的前提下,但是,迄今为止绝大多数无人机产品仍采用各自的标准设计,系统之间未实现标准化,直接导致各家无人机数据协议差别较大,操作平台过多,维护成本过高等问题。在国内地面站方面,已经实现任务规划、飞行控制、链路监控、飞行控制、载荷控制、航迹/参数综合显示、数据存储处理与分发等功能[4],但各项功能应用起来相对分散,缺乏统一的体系,且主要是针对某一机型或某类设备单独研制,兼容性较差。
为解决上述问题,本文提出了一种基于XML的异构无人机通用数据解译技术的无人机通用指控系统,实现对多型无人机的通用化、一体化测控;在软件架构设计上采用通用的架构设计方法,各模块以插件化方式进行集成[5-6],内部提供统一的数据接口,可根据无人机参数的不同进行灵活的变化,无需更改程序即可兼容新型无人机,解决了系统扩展性的问题。
1 平台设计实现
1.1 平台设计分析
无人机指控平台的基本功能是实现对无人机、载荷等任务设备的实时监视与控制,通用化的无人机指控平台要求基于同一软件平台实现对多型无人机系统的兼容测控,并具有较高的先进性和可扩展性,以适应未来新型无人机的接入需求。
通过对国内外主流的大型无人直升机、中小型固定翼无人机、便携式固定翼无人机、多旋翼无人机等多种机型进行对比分析发现不同厂家无人机的测控协议大不相同,例如,一般机型都是以二进制分帧格式进行表示,但也有个别机型如MD4-1000等是以ASCII编码方式分帧表示,而且,不同机型测控数据帧的帧头、帧长度、参数属性等具体信息都不尽相同,这些都给无人机系统的通用测控带来了很大困难,也是造成无人机指控系统间通用性较差的主要原因。
为了实现通用化,本文在原指控平台基本功能上增加接口协议控制功能,该功能基于XML的异构无人机通用数据解译技术,实现对多型无人机测控协议的统一解译,并转换为系统内部标准数据协议,各监控软件只需对标准数据协议进行解析,不再依赖于各型无人机特定的协议,较好的提升了平台的通用化水平。
1.2 硬件设计
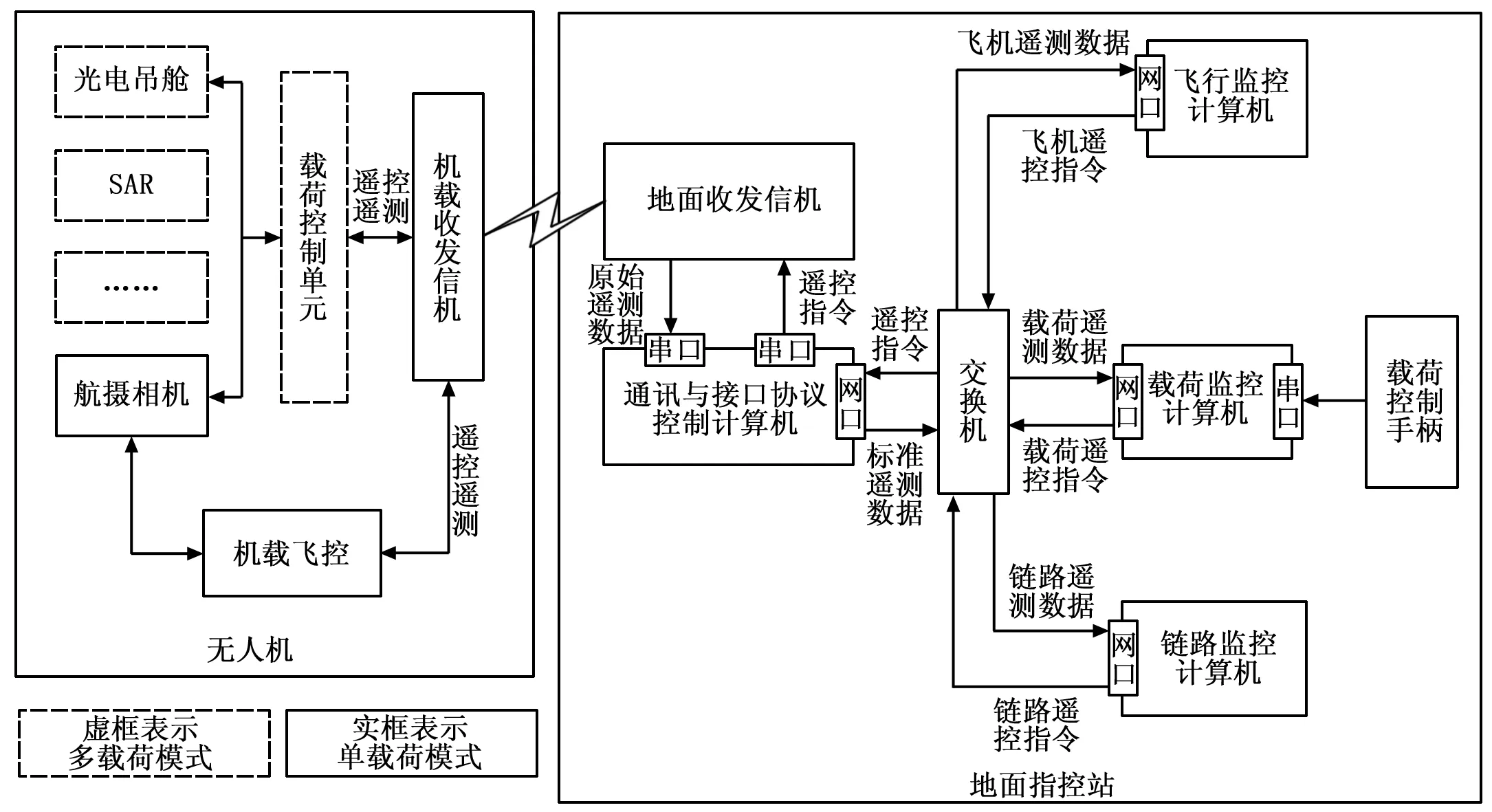
图1 平台硬件组成
无人机指控系统分为机载端和地面指控端两大部分,其中无人机通用指控平台软件部署于图中的地面指控站上,地面站配备千兆交换机实现平台内部信息的网络化传输。
无人机搭载任务载荷对目标区域进行航拍,通过数据链路实时回传遥测数据至地面指控站,由通讯与接口协议控制计算机对飞机、载荷遥测数据进行统一解析、分发和存储,解析后的标准数据传输至各监控软件进行状态实时显示。通讯与协议控制计算机同时接收飞机、载荷、链路的控制指令,按设备规定格式封装后通过数据链路上传至机载端,完成对机载设备的控制。
1.3 软件组成
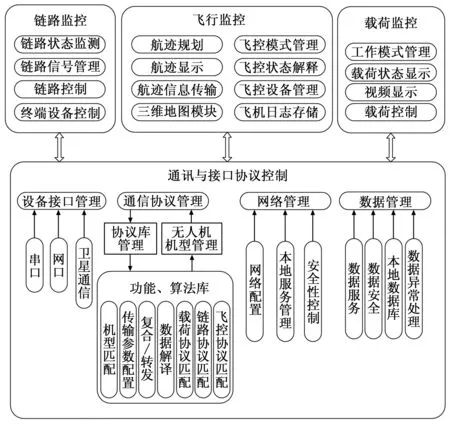
图2 平台软件组成
如图2所示,无人机通用指控平台包括通讯与接口协议控制、链路监控、飞行监控和载荷监控四部分。
通讯与接口协议控制软件基于异构无人机通用数据解译技术(技术实现说明参见第2章),是平台通用化处理的核心部分,负责通讯接口和通讯协议的管理与控制,直接与外部设备进行交互,对内提供统一的数据接口,屏蔽不同无人机平台的差异性。
通讯与接口协议控制软件包括设备接口管理模块、通讯协议管理模块、网络管理模块和数据管理模块四部分,其中,设备接口管理模块负责对外部设备的接口形式进行统一接入处理,支持网口、串口等多种数据接口形式;通讯协议管理模块负责对多型无人机协议进行配置与管理,应用异构无人机通用数据解译技术,将原始数据统一转换为内部标准协议推送至各监控软件进行可视化展示;网络管理模块负责平台内部的网络协议配置、网络传输方式设置等,支持TCP、UDP组播等多种网络通信方式;数据管理模块对内提供统一的数据管理接口,负责存储和管理系统中原始遥测数据、遥控数据、标准协议数据、视频数据以及各种日志数据等,保证数据的安全性、可靠性及完整性。
链路监控软件负责对地空链路及通信设备进行指令控制和状态监控,负责通信天线控制和状态监视。链路监控软件的首要任务是实现对地空链路的双向控制,以及数据通讯端口的控制,该软件能实时监控链路回报状态信息,发现并提示链路异常状态。
飞行监控软件[7]负责无人机飞行控制和飞行状态监视,包含飞行航迹规划、起飞、航线导入与验证、姿态位置监控及降落的控制等。
载荷监控软件负责对机载载荷的控制与状态监视,完成机载载荷的开关控制、方位姿态控制、载荷类型切换控制、参数设置等,同时接收载荷航拍数据并实现视频解码、显示和回放。进入系统之前,需要对载荷类型进行选择配置,机载载荷根据类型的不同,分配独立的载荷身份识别PID标识,切换PID完成对不同载荷的控制,当载荷监控软件完成PID切换时,视频显示部分优先显示该PID对应载荷的下传数据,以实现软件对不同载荷数据的显示、记录和回放。
飞行监控和载荷监控软件采用WPF界面设计框架,支持自定义界面组件,针对不同机型和载荷设备可实现界面定制化加载。
2 通用化关键技术
针对不同型号无人机数据协议的通用化解译需求,通过对多型数据协议进行分析,本文提出了异构无人机通用数据解译技术。该技术中设计了一种可满足多型无人机测控协议的无人机遥控、遥测配置文件(XML格式),包含与无人机测控有关的所有参数字段(比如:经度、纬度、姿态角以及飞机状态等信息),各机型对应一套配置文件,通过配置文件引导程序完成对各属性值的解析,解决了数据译码的通用性[8]问题。兼容新机型时,分析该类无人机的测控协议,并按照配置协议标准格式创建针对该机型的遥控、遥测配置文件,以达到与系统内部协议兼容的目的,进而实现对多型无人机的通用化测控,该技术的工作原理如图3所示。

图3 工作原理示意图
以遥测数据为例,接收飞机遥测后,首先对遥测数据格式进行统一转换,软件根据设置的飞机类别检索并加载对应型号的遥测协议配置文件,根据配置项相关信息,在遥测数据中解析出飞机的偏航角、方位角等飞行状态信息和位置信息等。配置文件内容示例如下:
……
该配置文件描述了ZW310型无人机飞控遥测数据协议,文件中包括遥测数据帧头、帧长、各属性值的名称、起止位置、类型、精度等信息,由该配置文件可知,遥测数据包的开头标志为B562,其中,GPS子帧帧头为020048,帧头后的数据长度为103个字节,其中,“纬度”属性开始于第16个字节,长度为4个字节,这时程序可以将 GPS 数据中的“纬度”数据信息解算出来,乘以相应的精度值(scale)换算成实际的纬度值,最后以JSON的形式封装成系统内部标准协议格式,推送至各监控软件进行显示,保证了后端软件的一致性,标准协议格式如下所示:
{
“PlaneData” :
{
“PlaneID”: “Plane00001”,
“Longitude”: “180.0”,
“Latitude”: “90.0”,
“GPSHeight”: “99999.0”,
“Pitch”: “90.00”,
“Roll”: “90.00”,
“Yaw”: “90.00”,
“GPSstarcount”:”8”,
……
}
}
发送遥控数据时,软件会根据该类飞机唯一的类别编码检索配置文件里对应的该类飞机的遥控协议配置内容文件,根据配置项相关信息,对遥控指令进行组帧,以飞机可识别的格式发送给飞机平台。
3 平台应用实践
平台通讯与接口协议控制软件是通用化实现的核心,软件参数设置界面如图4所示。
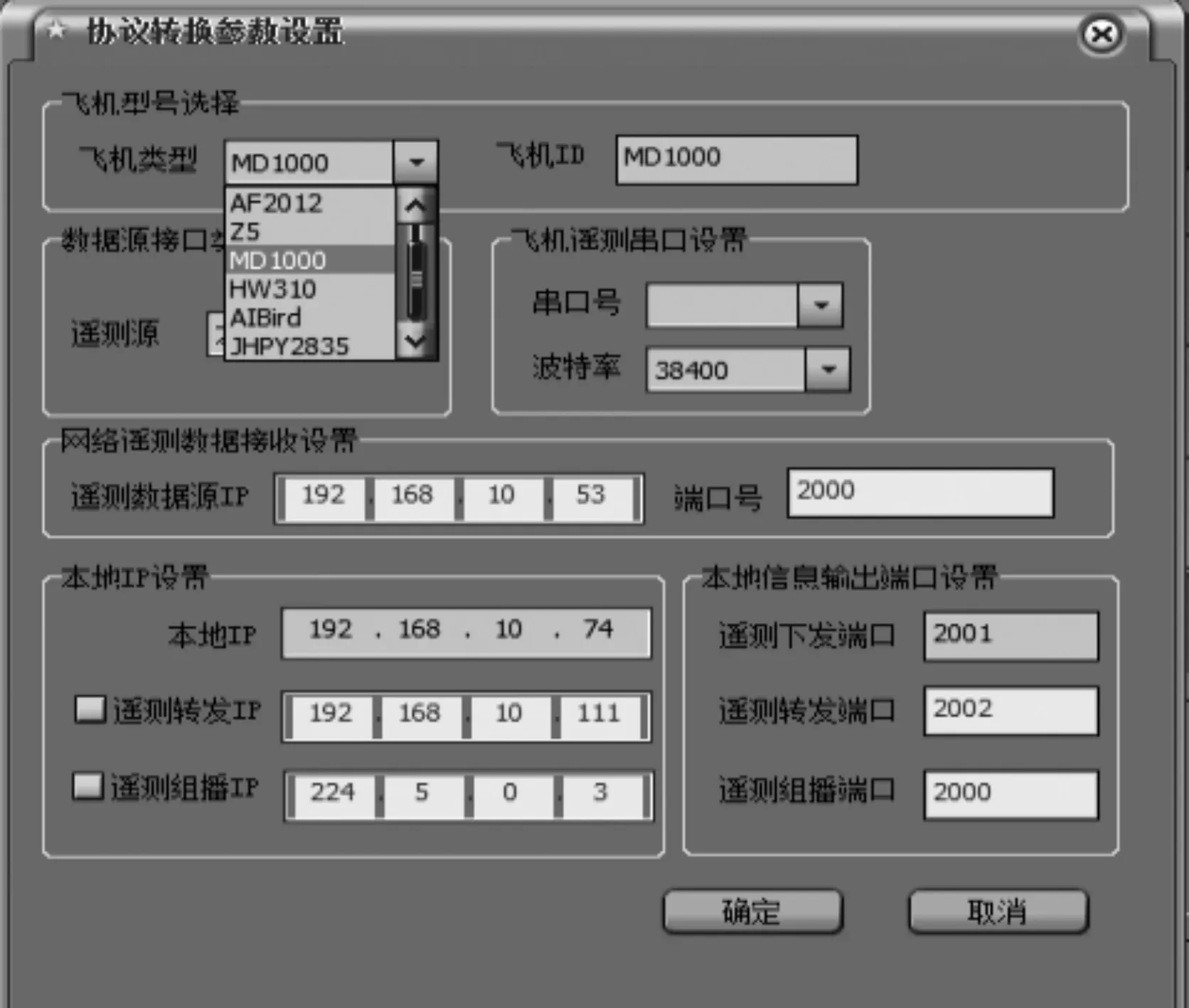
图4 参数配置界面
通过对串口参数或者网口参数进行配置可实现与地面收发设备的数据通信,选择“飞机类型”后,软件自动加载与机型匹配的配置文件,解译后封装成JSON格式后转发至监控软件进行可视化展示。
平台以单兵一号固定翼无人机、Z5型无人直升机、MD4-1000多旋翼无人机等多型无人机飞控为测试平台,对本文设计的无人机通用指控平台的通用性进行实际验证,实验结果表明本平台对各型无人机具有较好的兼容性。目前,平台已经实现对单兵一号、MD4-1000、智能鸟KC2000、CY-01H、海鹰310等八款无人机飞控的通用化兼容,并已部署在多省海域监控指挥车中进行应用,实际部署效果如图5所示。

图5 部署效果图
4 结束语
无人机通用指控平台可以最大限度的保证控制平台的适应能力,消除无人机平台与不同应用之间的差异性问题,同时具备协议管理、链路监控、载荷监控、飞行监控、航迹显示、视频图像处理、数据管理等无人机指挥控制系统通用性功能,并可根据实际需求进行裁剪。
平台建成后,通过行业分析加入领域模型和可变性分析,便可快速、低成本的搭建新的无人机行业应用系统,构建包括林业、海洋、石油、电力在内的多行业无人机指控系统也是本文以后的研究和应用方向。
[1] 王满玉,邢富领,吴 潜.北约无人机控制站互操作标准化接口STANAG 4586标准解析[M].北京: 国防工业出版社,2011.
[2] 曲东才,陈伟良,陈琪等.无人机控制站交互性操作的标准化接口技术[J].飞机设计,2006(2):36-40.
[3] 曲东才,唐琳娜,吴晓男等.STANAG4586标准化接口——从理想到现实[J].飞航导弹,2005(9):6-13.
[4] 吴 潜.无人机测控系统的现状与发展趋势.电视技术[J].2009,49(9):90-94.
[5] 马聪颖,高瑞周,朱玉祜.无人机地面控制站通用化软件架构[J].航空计算技术,2013,43(3):112-118.
[6] 陈方明,陈 奇.基于插件思想的可重用软件设计与实现[J] .计算机工程与设计,2005,26(1):172-173.
[7] 刘 洋,马丽娜,刘 磊.无人机地面站飞行监控系统软件设计[J].计算机测量与控制.2014,22(1):294-296.
[8] 赵 跃,祖家奎.无人机飞行数据通用化译码软件设计及实现[J].工业控制计算机,2011,24(11):35-37.
Design and Implementation of Generalized UAV Command and Control Platform
Liu Hui1, Wang Hongmiao2, Hu Nan1, Yan Hua2
(1.National Ocean Technology Center, Tianjin 300112, China;2.Tianjin Zhongwei Aerospace Data System Technology Co.,Ltd., Tianjin 300301,China)
Existing a greater difference between the different type of data protocol format of unmanned aerial vehicle(UAV),and the ground command and control system closely coupled with UAV,according to different development models to different charges system,system of poor generality leads to development and high cost of training, and can’t meet the future demand for more UAV collaborative task.Therefore,it is necessary to research and development a high generality of unmanned aerial vehicle (UAV)charges system,through generalizing of heterogeneous UAV measurement data processing,forming strong extensibility of UAV standard data protocol,in order to eliminate the differences between different charges system,at the same time,the maximum guarantee control platform of extensible ability.
UAV;generalize;command and control;data protocol
2017-01-10;
2017-02-27。
海洋公益性行业科研专项经费项目(201405028)。
刘 惠(1966-),女,天津人,研究员,学士,主要从事计算机应用、无人机系统方向的研究。
王泓淼(1986-),女,硕士,助理工程师,主要从事无人机指挥控制系统方向的研究。
1671-4598(2017)07-0170-04
10.16526/j.cnki.11-4762/tp.2017.07.042
TP3
A
