基于转辙机牵引力和PSO-SVM的道岔故障诊断研究
2017-08-30杨小锐安邦军
杨小锐,王 安,安邦军
(西北工业大学 自动化学院,西安 710129)
基于转辙机牵引力和PSO-SVM的道岔故障诊断研究
杨小锐,王 安,安邦军
(西北工业大学 自动化学院,西安 710129)
随着高速铁路的快速发展,道岔故障频发,成为一直是急需解决的重大安全问题;首先从道岔的运行原理出发,研究了转辙机拉力对道岔的影响;然后进行了转辙机的电动机的功率和电流参数的比较,结果表明,转辙机拉力更能直观反映道岔的运行情况;最后提出了用转辙机拉力参数实现基于粒子群算法优化支持向量机(PSO-SVM)的道岔故障诊断算法;经过对实际数据的处理,表明此种诊断方法对道岔的故障有较好的分辨能力。
道岔;故障诊断;支持向量机
0 引言
由于我国经济发展和资源分布的不均衡,铁路承担了大量的中长途旅客运输以及长距离的货物运输,给人们提供了极大的方便。道岔作为铁路线路变更的转换设备,是线路的交合分离点。铁路道岔更像是整个铁路网的关节和咽喉,也是整个铁路网最薄弱的环节,是铁路事故的多发点。
道岔故障的隐蔽性比较强,复杂度高,并且长期以来没有完善的智能检测分析和预警的系统。现阶段,关于道岔设备的监控和故障分析主要是由现场维护者完成,采用故障修和定期维修的方法。故障修是指在设备发生故障后再进行维修,通常都伴随着巨大的安全问题。定期维修是指维护者按一定的周期对道岔设备的运行状态进行维护,容易造成过剩维修,带有很大的盲目性。现已提出状态修的概念,即依据道岔运行状态对道岔进行维护,动态掌握道岔的运行特性[1-2]。
目前国内外的诸多学者都对道岔的故障进行了研究,研究的算法多种多样,包括专家系统、神经网络、神经网络的优化、卡尔曼滤波、贝叶斯等[4-8]。选取的数据基本上是电流或者功率,但是就转辙机搬动道岔的运行过程看,转辙机牵引力能直观的反映道岔的运行状态,因此,选取了拉力数据来研究。
1 道岔故障模式分析
1.1 转辙机拉力数据获取
从图1中可以看出转辙机与道岔是通过连接杆和连接销连接的,即转辙机提供的动力通过连接杆和连接销传递到道岔,使道岔做相应的运动。因此,转辙机的牵引力与道岔的转换阻力是作用力与反作用力的关系,力的转换点在连接销处。若用销式力传感器替换连接销,就可以测量出转辙机牵引力的大小,这对于所有的转辙机和道岔都是成立的。因为力传感器对力的测量是直接的,所以测量精度取决于力传感器本身,而且对力变化的响应是及时的,所以拉力曲线的变化能够实时显示出来。

图1 S700K型转辙机结构图
便携式转辙机拉力测试仪是应用力传感器测量道岔转换阻力的方法。由于便携式转辙机拉力测试仪是目前国内使用最多的,也是国家铁道标准规定的道岔阻力测量仪器,所以下面所用到的测试数据均是使用拉力测试仪在现场获得。
1.2 道岔正常动作曲线分析
《铁路信号维护规则技术标准I》中指出,S700K型电动转辙机在正常情况下,其动作时间应小于等于6.6 s,牵引点的额定转换力也是固定的。下图是一组转辙机在道岔无故障时的牵引力曲线。

图2 拉力测试曲线图(正常)
道岔转换的主要动作过程分为3个阶段:解锁、转换、锁闭。
第一阶段:解锁。解锁的时候,道岔刚启动时,需要克服较大的阻力来带动传动设备运转,完成转辙机内部的解锁。同时,也需要推动外锁闭装置完成外部解锁。因此,转辙机需要输出足够大的牵引力。解锁快结束时的牵引力通常要大于转换时的牵引力,并且从解锁开始到解锁结束,力是呈上升趋势的。
第二阶段:转换。在转换过程中,转辙机拉动尖轨移动,设备运行平稳,牵引力稳定在一定值左右,曲线较为平缓。在这个运行过程中,除去其他因素,牵引力应是越小越好,因为这表明需要克服的外界阻力比较小。
第三阶段:锁闭。道岔尖轨或心轨转换到指定位置后进行锁闭,锁闭时要克服锁闭装置的阻力,因此,在锁闭刚开始的时候,牵引力会比转换时要稍大一些,而后趋于0。
锁闭后道岔控制电路切断电源。道岔控制电路被切断,电流曲线的值会迅速下降。又因为锁闭状态下接通了表示电路,而这个电路接通时,转辙机的电源端子也是接通状态。但是,1DQJ具有缓放特性,道岔电流不为0。
1.3 道岔故障曲线分析
道岔的故障大致分为机械故障和电气故障,而道岔的机械故障占道岔故障总数的90%以上,并且,道岔的机械故障总是能够导致严重的安全事故。
主要研究了机械故障中的三类故障:尖轨反弹、转换阻力过大和多点牵引出力不均匀问题。分析S700K电动转辙机的拉力曲线,探究其产生原因,并给出可能的解决办法。
1)尖轨反弹(故障模式1)。
反弹现象一般发生在解锁的时候,能听见“咣当”一声,尖轨会顺着移动的方向“窜动”一下,表现在力曲线上就是图3中力3。道岔是从缩回状态往伸出状态转换,但是表现出来在解锁阶段会向缩回状态瞬移。
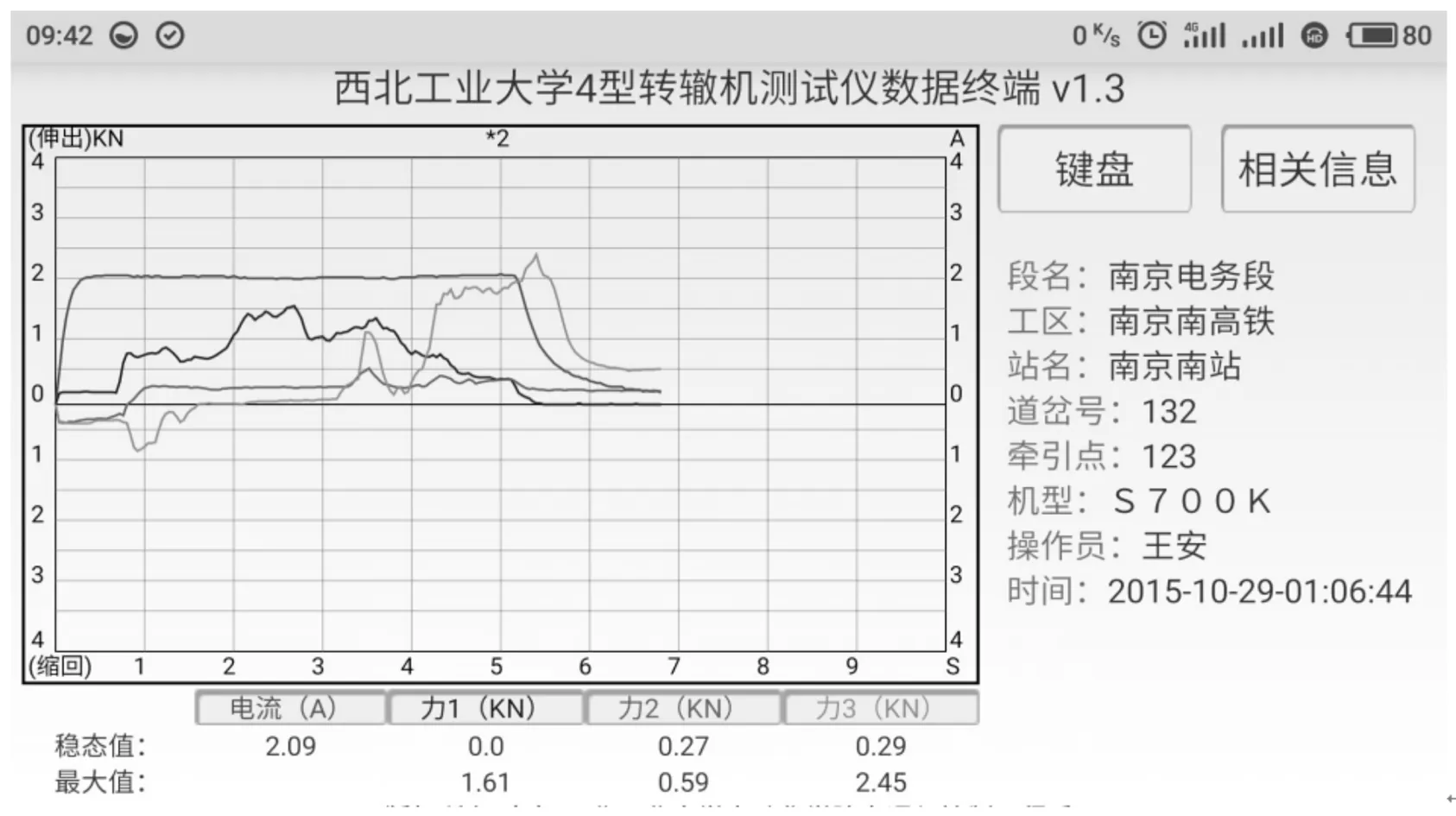
图3 拉力测试曲线图(故障模式1)
可能的原因有:尖轨有侧弯迹象,曲尖轨动程偏小,所以在扳动尖轨,尖轨与基本轨不能同时密贴,在再次扳动尖轨时,尖轨容易反弹;连接杆、接头铁和连结销锈蚀或螺栓过紧,形成整体框架,尖轨扳动时转辙不灵活;尖轨爬行等。
2)转换阻力过大(故障模式2)。
转换过程中的某个时间段出力较大,转换困难,可能存在尖轨爬行,拉来曲线抖动幅值较大。转换阻力过大的现象表现在力曲线上就是图4中的力2、力3。

图4 拉力测试曲线图(故障模式2)
可能的原因有:外锁闭杆中心线与固定在基本轨上的锁闭框中心线不垂直平行,锁闭框与锁闭杆磨卡,造成道岔转换阻力急剧加大,使道岔不能正常转换;道岔杆件连接部分,如道岔尖轨爬行,道岔尖轨在天气因素影响下由于热胀冷缩而引起伸长或缩短,这种情况下与尖轨相连的锁闭杆位置也随尖轨爬行而变化,导致转辙机动作杆的动作无法顺畅完成,产生异常阻力。
3)出力不均匀(故障模式3)。
出力不均匀现象表现在力曲线上就是图5中力2和力3,在整个过程中有一段时间不出力。

图5 拉力测试曲线图(故障模式3)
可能的原因:解锁不同步,先解锁的走得快会拉着后解锁的,所以先解锁的力会大一点;滑床板不够规整,因为尖轨在转换过程中会落在滑床板上,整个过程都会摩擦滑床板,前后牵引点的滑床板不够规整,可能造成牵引点出力的不均匀。
2 道岔转辙机拉力曲线的特征表示
常用的时域特征参数分为有量纲特征参数和无量纲特征参数,主要包括:最大值、最小值、平均值、峰峰值、方差值、标准差、均方根值、峭度值、波形因子、峰值因子、峭度因子、脉冲因子和裕度因子等。除此之外,道岔的稳态力也是很重要的指标。稳态力就是道岔在锁闭的状态下,尖轨对转辙机施加的力,对最后转辙机锁闭状态是一个很好的衡量标准。
1)最大值:表示转辙机拉动道岔受到的最大阻力。
2)最小值:表示转辙机拉动道岔受到的最小阻力。
3)平均值:能够反映转辙机拉力的中心趋势。
4)峰峰值:在转辙机拉动道岔过程中,拉力值的波动情况。
5)方差值:主要描述转辙机拉力值在平均值附近的离散程度。
6)标准差:描述转辙机拉力值在平均值附近的离散程度。
7)均方根值:描述了转辙机拉力值的波动情况。
8)波形因子:反映区段内拉力信号的波动趋势,且与振幅无关。
9)峰值因子:反映拉力信号中是否存在冲击信号的指标。
10)峭度因子:对脉冲故障敏感。
11)脉冲因子:对拉力信号中的冲击脉冲类信号敏感。
12)裕度因子:对拉力信号中的冲击脉冲信号比较敏感,且减少了偏差差异。
13)稳态力:衡量道岔转换到位后的状态。
3 基于PSO-SVM的道岔故障诊断方法
3.1 故障诊断整体流程
首先把原始数据依据一定的规则划分成训练集和测试集,然后对数据进行预处理,包括归一化处理和特征提取等等,再之后利用训练集数据对SVM模型进行训练,得到最后的分类模型,再用测试集数据来测试测试集的分类,流程图如图6所示。

图6 SVM模型整体流程
3.2 SVM模型建立
对于线性可分的问题,平面H1、H2都能将两类样本正确的分开,即保证经验风险最小,这样的平面有无数个,最优分类面即离两类样本间隔最大的平面。

这样最优分类面的计算转化为待约束的最小值问题:

yi[(w·xi)+b]-1≥0 (i=1,2,…,n)
(1)
上式可转化为:
(2)

依矩阵形式表示如下:

(3)

由此可得到最优分类面如下:
(4)

对于线性不可分的问题,SVM采用将低维空间转化为高维空间的方法将其变成线性可分的,而将低维空间的输入转化为高维空间的内积值的映射函数就称之为核函数。V.Vapnik在引入核空间定理的同时提出,满足Mercer条件的对称函数都可作为核函数。
论文选用的是径向基核函数,主要因为RBF核函数能够满足Mercer条件,可对非线性可分的数据进行分类,需设置的参数个数较少,计算起来比较稳定[3]。
3.3 粒子群算法
因为SVM分类结果影响比较大的因素是核函数的参数选取和惩罚因子,而粒子群算法参数少、 简单、 全局搜索能力强等优点。
粒子群算法(PSO)是一种新兴群体智能优化技术,该算法最早是由Kennedy和Eberhart于1995年提出的,它的基本概念源于对人工生命和鸟群捕食行为的研究。
假设粒子群有m个粒子在一个解空间(n维空间)运动,粒子群为Z={Z1,Z2,…,Zm},这m个粒子各个粒子的位置为Zi={zi1,zi2,…,zin},每个位置都是一个解。粒子会调整自己来寻找新解,并且具有记忆性,会保留搜索到的最优解pid和目前群体的最优解pgd。粒子的速度为Vi={vi1,vi2,…,vin},如果已经找到了两个最优解,则粒子就更新自己。依据式(5)更新速度,依据式(6)更新位置。
vid(t+1)=wvid(t)+η1rand()(pid-zid(t))+
η2rand()(pgd-zid(t))
(5)
zid(t+1)=zid(t)+vid(t+1)
(6)
vid(t+1)为粒子在t+1次迭代中第d维上的速度。w为0时,粒子失去记忆性,失去搜索最优解的能力,所以一般取0~1之间的随机数。η1、η2为速度调节参数,rand()是0~1之间的随机数。此外,还可以限制粒子速度大小,设粒子最大速度是vmax,vid(t+1)>=vmax时,令vid(t+1)=vmax,vid(t+1)<=-vmax时,vid(t+1)=-vmax。
其参数流程如图7所示。
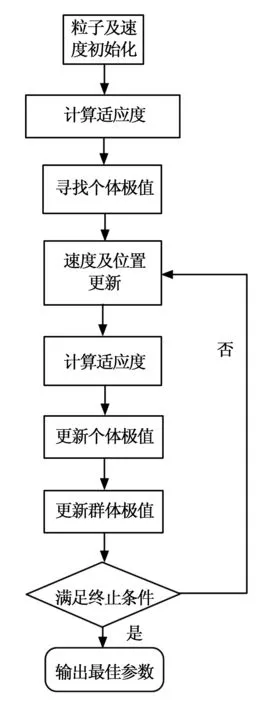
图7 PSO优化流程图
4 结果分析
所使用的数据是来自于S700k转辙机在全国各地不同地区的实地测量。所使用的测量仪器是教研室自己研制的转辙机拉力测试仪,并且教研室研制的这款仪器已经在全国范围内得到了广泛使用。
所使用的样本共109个,分为四类:无故障、故障模式1、故障模式2和故障模式3,分别贴的标签为0、1、2、3。其中每类又分训练样本和测试样本,其详细信息如表1所示。
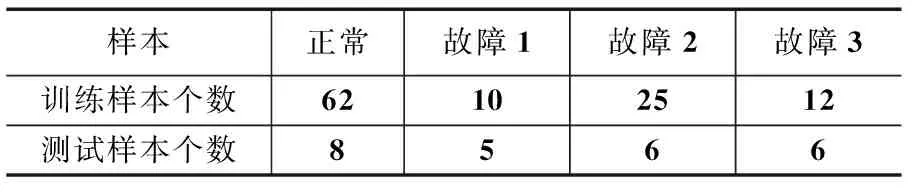
表1 样本集详细信息
利用MATLAB的SVM工具箱,编写PSO-SVM算法程序,参数c和g的搜索范围为[0.1,100],PSO最大进化代数100,粒子群的个数为 30, CV 折数为 4。
图8是粒子群算法对模型进行优化的适应度曲线。平均适应度为所有粒子在每一代中平均的适应度值,最佳适应度曲线为粒子群中所有粒子在每一代中的最大适应度值。从图8中可以看到,适应度曲线在前期收敛较快,随后逐渐趋于平缓,最终收敛水平趋近一致,即实现了参数的优化。

图8 PSO优化过程的适应度曲线
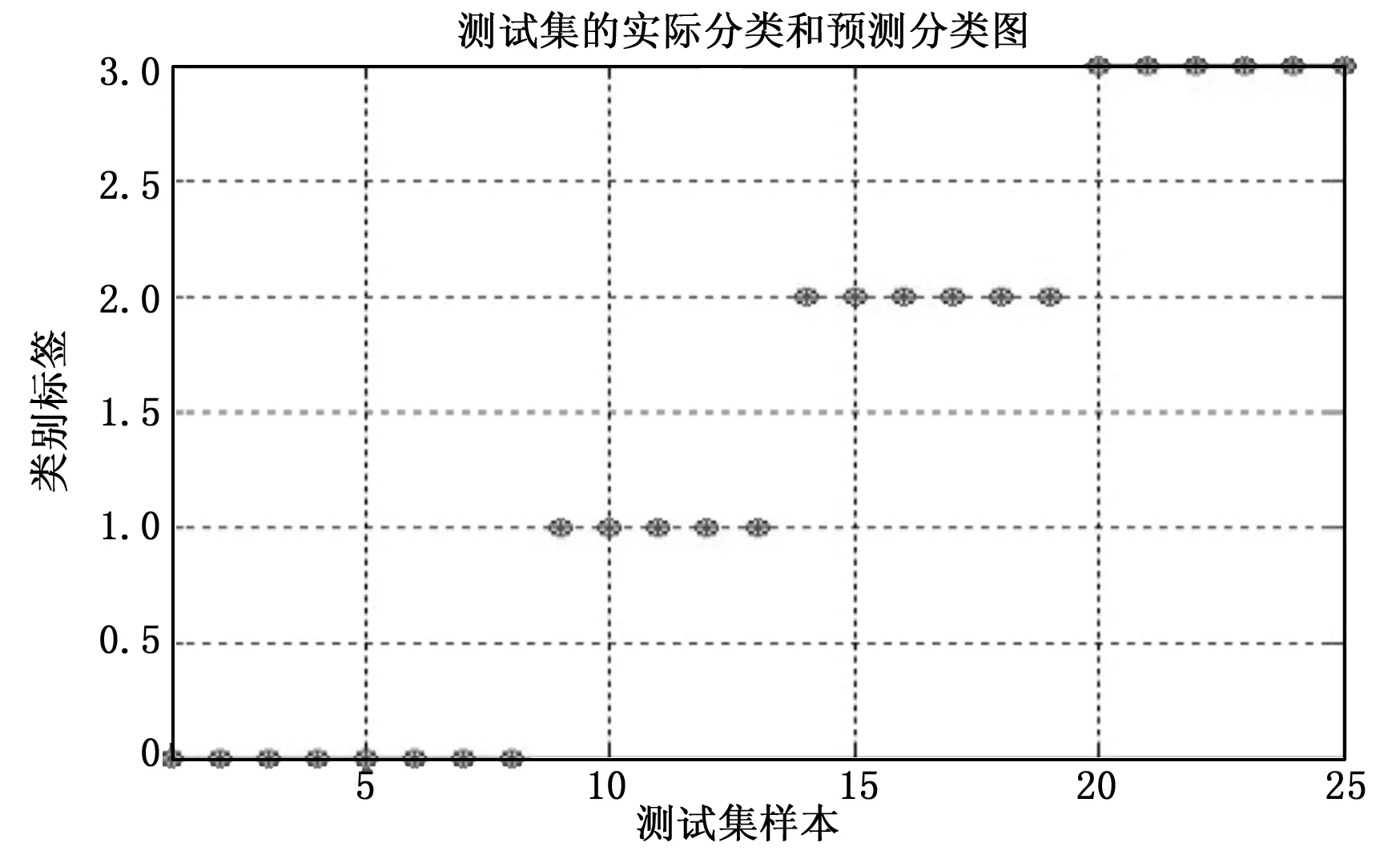
图9 PSO-SVM诊断结果
5 结论
在研究道岔运行原理的基础上,选取转辙机拉力参数对道岔常见的三类故障进行分析,选取了对故障敏感的时域特征,在建立PSO-SVM的故障诊断方法的基础上,通过实际收集的数据对算法进行了仿真验证,结果表明,模型最终的分类结果准确率达到了100%,选用拉力数据和PSO-SVM算法对此类故障诊断具有较好的效果。
[1] 宾任祥. 铁路运输安全管理概论[M],成都:西南交通大学出版社,2002.
[2] 丁家望. 高速铁路道岔设备维修的探索与思考[J]. 铁道通信信号, 2011, 47(5):53-55.
[3] Nelllo Cristianini,John Shawe-Taylor.支持向量机导论[M].北京:电子工业出版社, 2004.
[4] Atamuradov V, Camci F, Baskan S, et al. Failure diagnostics for railway point machines using expert systems[A].Diagnostics for Electric Machines, Power Electronics and Drives, 2009. SDEMPED 2009. IEEE International Symposium on[C]. IEEE, 2009: 1-5.
[5] 李雅美, 魏文军. 基于模糊神经网络的道岔故障诊断系统研究[J]. 铁路计算机应用, 2012, 21(1): 35-39.
[6] 关 琼. 基于 FOA-LSSVM 的高速铁路道岔故障诊断[J]. 科技通报, 2015(4):76.
[7] Eker O F, Camci F, Kumar U. SVM based diagnostics on railway turnouts[J]. International Journal of Performability Engineering, 2012, 8(3): 289.
[8] Yilboga H, Eker O F, Guclu A, et al. Failure prediction on railway turnouts using time delay neural networks[A].Computational Intelligence for Measurement Systems and Applications (CIMSA), 2010 IEEE International Conference on[C]. IEEE, 2010: 134-137.
Research on Turnout Fault Diagnosis Algorithm Based on SVM
Yang Xiaorui,Wang An,An Bangjun
(School of Automation, Northwestern Polytechnical University, Xi’an 710129,China)
With the rapid development of high-speed railway, turnout faults have been an urgent problem to be solved. Firstly, from the operation principle of turnout, the influence of traction force of switch machine on turnout is studied; then compared to the power and current parameters of the switch motor, and it was found that the switch traction can more directly reflect the operation conditions of turnouts; finally it put forward the turnout fault diagnosis algorithm based on PSO-SVM and the switch traction parameters. After the processing of the actual data, it was found that this diagnostic method had good resolving power on the turnout faults.
turnout; fault diagnosis; support vector machine
2017-01-21;
2017-02-21。
杨小锐(1989-),女,硕士研究生,河南济源人,主要从事嵌入式计算机、仪器仪表、机器学习等领域方向的研究。
1671-4598(2017)07-0055-04
10.16526/j.cnki.11-4762/tp.2017.07.014
TP206
A
