一种改进的粒子图像测速混合算法研究
2017-07-19房红兵黄海龙
王 甜,房红兵,黄海龙,王 驰
(1.南京理工大学 电子工程与光电技术学院,南京 210094;2.南京水利科学研究院,南京 210024)
一种改进的粒子图像测速混合算法研究
王 甜1,房红兵1,黄海龙2,王 驰2
(1.南京理工大学 电子工程与光电技术学院,南京 210094;2.南京水利科学研究院,南京 210024)
粒子图像测速技术作为一种新的流场测速方法能够在不干扰流场的情况下获得整个流场的速度信息。粒子图像测速技术最关键的步骤在于粒子匹配。针对粒子密度分布不均匀、流场不同等实际情况,提出了混合算法,即结合互相关和松弛算法能够更准确地搜索粒子,进而对粒子进行匹配。对3种匹配算法的匹配概率进行比较分析,发现混合算法能更准确地分析粒子的运动状态,减少错误矢量的产生;另外,对松弛算法进行改进,通过优化筛选加权因子发现改进的松弛算法在运行速度上相比原始算法有了较大提高,匹配率与原始算法基本一致。
流场速度;粒子图像测速;混合算法;超松弛迭代粒子追踪;粒子匹配;匹配概率
1 研究背景
利用粒子图像处理技术对流速的测量分为2类:粒子图像测速技术(Particle Image Velocimetry, PIV)和粒子追踪测速技术(Particle Tracking Velocimetry, PTV)。这2种方法都是通过在流体中加入适当的示踪粒子,在已知的时间间隔内利用激光脉冲照射所测流场的切面区域,使用CCD或其它成像系统记录2次或多次曝光的粒子发射出的散射光图像[1]。2种方法的区别在于如何从粒子图像中提取位移矢量。在PIV方法中,粒子图像被分为无数个称为检测窗口的小区域,利用数字图像处理方法求出窗口内的平均运动速度来作为该区域中心点的流速;PTV方法是在连续2帧粒子图像中对每个粒子进行跟踪,利用匹配算法对图像分析,从而获得整个流场的速度矢量。
随着CCD相机的普遍应用以及数字图像处理技术的快速发展,PIV技术越来越成熟。PIV技术中图像处理一般用基于快速傅里叶变换的互相关算法,这种算法能节约运算时间。但是,在测量视场一定的条件下,由于CCD摄像机分辨率的限制,利用PIV技术得到的数字图像空间分辨率较低。另外,由于PIV技术扩大了位移峰值,所以只能够产生精度较低的平均速度矢量。因此在粒子密度较低的区域产生的错误矢量较多。如果固体边界位于检测窗口内,利用PIV会得到错误矢量。而PTV算法是对每个粒子进行处理,所以精度很高,但相对应的数据处理量大,计算复杂,不适用于粒子密度大的区域。
在流场中撒入粒子是一个随机的过程,粒子的空间分布不能掌控,因此针对这种随机情况提出了一种新的方法——混合算法,即结合互相关和松弛算法,针对粒子分布不均匀、流场不同等情况有较好的适应性,并解决PIV粒子图像的低空间分辨率以及PTV算法的复杂度问题。其基本思想就是先利用互相关算法进行粗匹配,在此基础上利用PTV算法提高匹配精度。这种混合算法有效的提高了PIV算法的准确度,改善了PTV算法的计算效率,更能适应实际流场的情况。
2 PIV/PTV混合算法
2.1 松弛算法
在松弛算法中,将连续运动的2幅图像记为X,Y;粒子形心坐标矢量记为x,y;dij=xi-yj为xi到yj的位移矢量;lij=xi-xj(或lij=yi-yj)为同一帧图像中2点矢量位移。下面利用松弛算法为第1帧中的任一粒子xi寻找第2帧中的匹配粒子。
第1步,确定xi在第2帧中的候选粒子和在同一帧中的参选粒子,设Mi,Ni分别为xi的候选和参选点矢量个数,及候选粒子集合和参选粒子集合分别为Φc,Φr,并有
(1)
式中:Rs为候选粒子的固定阈值半径,为两时间间隔内粒子的最大位移;Rn为参选粒子的固定阈值半径,一般是Rs的1.5~3倍;Rq为相似运动半径(一般为Rs的20%)。
确定候选粒子和参选粒子的方法通常使用直接给定2个固定阈值的圈选法,而这2个阈值的确定需要依赖于流场的流动特性和示踪粒子的分布,如图1所示。
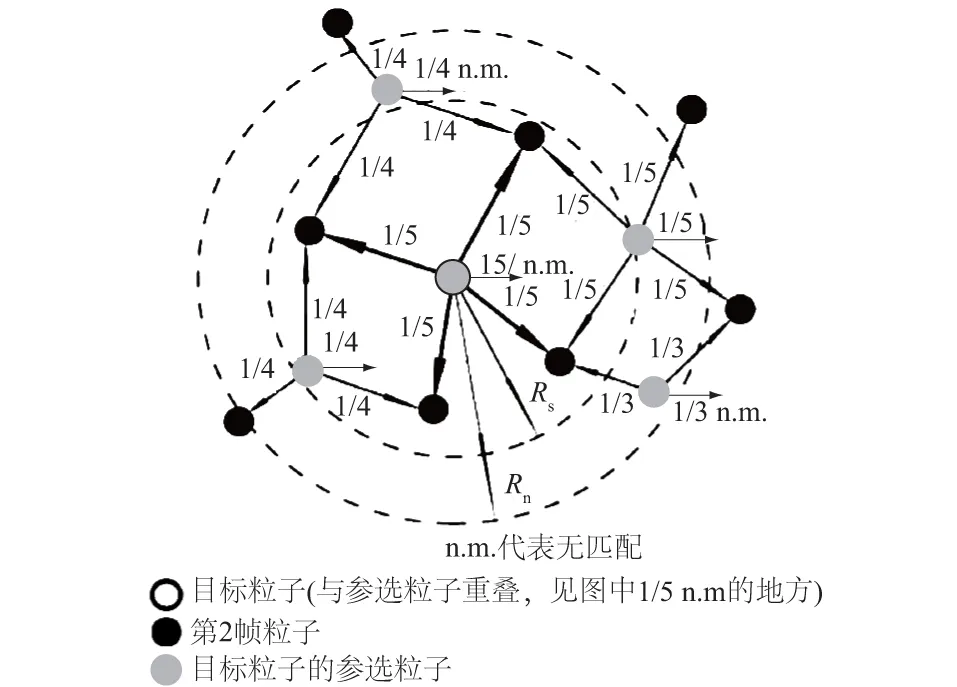
图1 松弛算法原理Fig.1 Principle of relaxation algorithm

(2)
迭代之前需先确定初始值Pij(0)和Pi*(0),对加权预判和计算效率进行折中考虑后令初始值为
(3)
第3步,对Pij进行迭代运算,即
(4)
式中:A=0.3,为松弛迭代的衰减因子;B=3,为松弛迭代的增益系数;Θ为参选位移矢量的集合,即
(5)
(6)
(7)
以上为xi的一次完整匹配概率过程。
最后迭代运算为重复第3步,直至各匹配概率收敛。
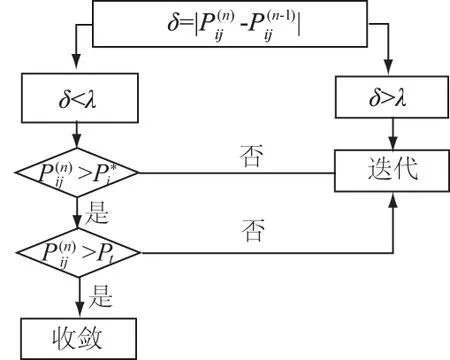
图2 松弛算法的迭代收敛过程Fig.2 Process of iterative convergence of relaxation algorithm
关于匹配概率的迭代次数,Ohmi等指出迭代的最佳次数取决于很多因素,并没有统一形式而言[2]。现在,通常采取一种简单的方法来决定迭代次数,当初始粒子i最初的匹配概率Pij和经过迭代n次过程后的匹配概率Pij(n)之差δ小于一个特定的阈值λ,并且迭代过后的概率要比无匹配概率Pi*和匹配概率阈值Pt大,认为匹配成立,Pij不再变化,根据实际流场的一般特性,λ一般取0.001[3],图2显示了松弛算法的迭代收敛过程。
上述松弛算法针对高密度粒子分布或者较强的剪切流运动时错误矢量粒子的产生比较明显,如果利用松弛算法本轮迭代的结果作归一化处理,那么,匹配概率会增大,这样就能减少迭代次数[4]。另外式(6)和式(7)对匹配概率做归一化从数学角度来看缺少一致性,为了使无匹配概率保持在一个相对稳定的值,式(6)与式(7)可以作如下变化:
(8)
(9)
另外,对于参选位移矢量的选取,原始算法没有考虑粒子边界速度的不连续性,那么对于相似运动半径Rq的选取就会变得比较困难,因此令
(10)
式中E,F均为常数。其形式是全局量E(由流场具体情况决定)与局部量(F=0.05)之和,从而能更好地适应强变形流场[5]。
这是其中一种改进算法,针对以上改进的算法,本文提出一种新的松弛算法超松弛算法,即结合以上2种算法进行优化。对无匹配概率迭代作加权平均,找出最佳匹配概率,缩短计算时间,如式(11)、式(12)所示。
(11)
(12)
其中0<ε<1。
2.2 基于互相关的PIV算法
PIV技术中的互相关是把图像看成二维离散序列,对连续2幅图像做互相关处理。互相关函数的最大值所在位置即检测窗口内的粒子在采样间隔之间的位移。一般图像对之间的采样间隔Δt已知,进而可计算出粒子的平均速度。上述方法只介绍了如何实现某一区域的平均速度的单一测量,要实现整个流场的二维速度测量,需对图像对进行网格划分,也就是划分成一个一个检测窗口,然后再利用上述方法计算每个检测窗口内的互相关函数,互相关函数的最大值也就是粒子的运动位移,其位移就是检测中心位置的平均相对位移[6]。
直接利用互相关函数的定义进行互相关函数的计算,计算量是非常巨大的,所以在算法的实现上为了提高运算效率,可以采用二维快速Fourier变换实现互相关计算[7]。

图3 3种算法粒子矢量图对比Fig.3 Vector maps of particle-tracking by three algorithms
2.3 混合PIV/PTV算法
粒子密度高,采用松弛算法不仅会花费很长计算时间,而且错误矢量也会增多。如果检测区域的粒子速度已知,相比只利用松弛算法而言,结合互相关算法可以更快更有效地找出匹配的粒子,这样就能减少计算时间;互相关的分析结果可以用来初始化松弛算法,这样利用松弛算法进行迭代匹配的次数就减少了[3]。
结合互相关算法和松弛算法的特点,混合PIV/PTV的基本步骤是:首先对原始粒子图像进行预处理,预处理的主要目的是尽可能的消除图像中的干扰噪声;其次对图像中的粒子进行识别,常用的方法是数字掩膜法;最后最关键的步骤是粒子匹配,先用互相关算法确定初始的速度矢量场,互相关算法的匹配不会对整个过程有影响,但是可以利用其结果更新松弛算法的迭代概率[8]。在互相关处理过的速度矢量场上使用松弛算法进一步对粒子进行匹配运算,最后对图像进行滤波处理输出。
3 同步图像分析
本文选用698×486像素的8位PIV标准粒子图像在MatLab仿真软件上计算模拟粒子图像位移场。标准粒子图像提供4 000个粒子供匹配,但不同的匹配算法能匹配的粒子数目不同。对粒子匹配过程分别选用互相关算法、松弛算法、混合算法(结合互相关和松弛算法)进行比较分析,如表1所示。在粒子识别处理过程中选用高斯掩膜法。
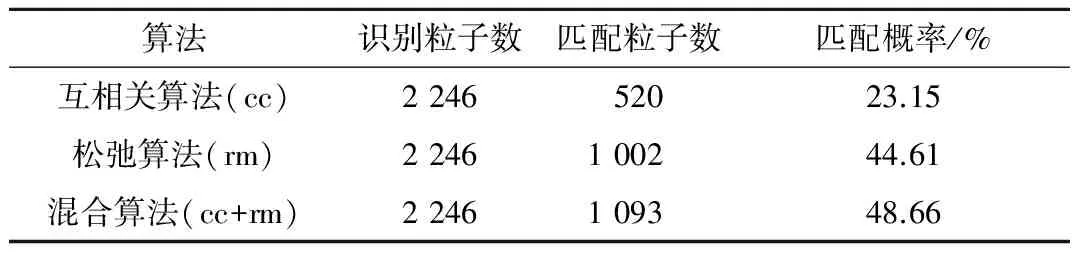
表1 不同算法的匹配粒子数
从表1可以看出混合算法和松弛算法能识别出的粒子数分别为1 093和1 002,匹配概率分别为48.66%和44.61%,混合算法和松弛算法匹配的粒子数差别不大,这主要是由于松弛算法在粒子密度较小的图像中更能发挥其特点。但在实际流场中粒子分布不均匀,混合算法更能适用于普遍情况。互相关算法识别出的粒子数为520,匹配概率为23.15%,另外混合算法所需的时间要比松弛算法所需时间少,这是由于先利用互相关算法进行了全局分析匹配减小了松弛算法所需要匹配的粒子数。
图3(a)为互相关算法所检测到的粒子矢量图,因为互相关的对象为检测窗口,所以图3(a)相比图3(b)检测到的位移矢量较少,但位移轨迹长。图3(b)运用的松弛算法,针对每个粒子做运算所以位移矢量较多,大体能显现流体的轨迹。图3(c)为混合算法粒子矢量图,综合了以上2幅图的优点,位移矢量多,且轨迹明显,很好地反映了流场的运动状况。
为了进一步验证混合算法的普遍性,改变参数,在不同的情况下对这3种方法进行比较分析。
图4(a)是撒入流场中的粒子数分别为2 000,4 000,8 000时3种算法所能匹配的粒子数的折线图,从图中可以看出混合算法所能匹配的粒子数最多。另外随着粒子数的增加,错误矢量也随之增加,匹配概率也就相应减少。
图4(b)是3种算法在不同的流体中匹配的粒子数折线图,在不同的流场条件下,混合算法的适应性更强,因此在实际情况中更能准确地反映流场的流动状况。
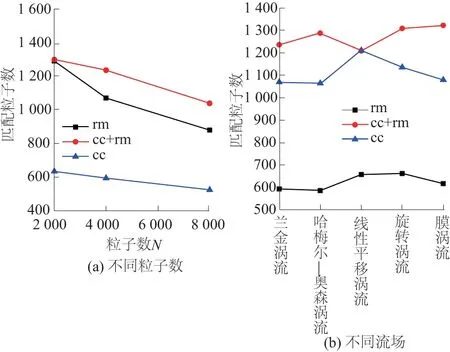
图4 3种算法的不同粒子数和不同流场的匹配粒子数折线图Fig.4 Numbers of matched particles with various particles densities and flow fields
对超松弛算法而言在保证匹配概率最优的情况下减小迭代次数,缩短计算时间能够提高整体的优化性能,对松弛算法式(11)、式(12)式取不同的ε值,其CPU运行时间的统计结果如图5所示。
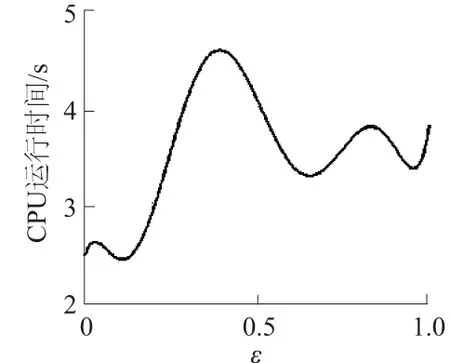
图5 CPU运行时间统计结果
当ε分别为0和1时,此时的松弛算法分别为改进的松弛算法和原始松弛算法。从中可以看出当ε=0.109 11时,松弛算法所需时间最短。
4 结 论
可定性及定量研究湍流的PIV技术已成为现代流体测速的重要工具。利用PIV除了能得到流体的速度之外,还可以通过PIV数据计算出涡量、压力场、加速度等。在能源工程、环境工程和防御工程等领域也有很多应用。针对粒子分布不均匀的流场,在精度方面混合算法比单独使用互相关算法及松弛算法匹配率更高,互相关算法不注重临近粒子的匹配率,而松弛算法是建立在临近粒子相似运动的基础上来进行叠加匹配的。另外,在互相关算法中,速度梯度增加,窗口重叠区域减小,更少的粒子进行互相关。松弛算法能解决速度梯度变化较大的问题,混合算法是结合互相关和松弛算法各自的优缺点使其在性能上更优越。本文改进的超松弛算法使混合算法在保证匹配概率最优的情况下减小迭代次数,缩短计算时间,提高了工作效率。
[1] 崔 恒. 流体二维图像测速技术的研究[D].大连:大连理工大学,2006:15-21.
[3]OHMI K, LI H Y. Particle-tracking Velocimetry with New Algorithms[J].Measurement Science and Technology,2000,11(6):603-616.
[4] 杨福胜,张早校,王斯民,等. 粒子追踪测速(PTV)技术及其在多相流测试中的应用[J]. 流体机械,2014,(2):37-42.
[5] BAEK S J,LEE S J. A New Two-frame Particle Tracking Algorithm Using Match Probability[J]. Experiments in Fluids,1996, 22(1): 23-32.
[6] 张 洋,王 元,李志强. 结合双向法则的松弛迭代粒子追踪测速法[J]. 空气动力学学报,2010,28(3):250-254.
[7] KIM H B,LEE S J. Performance Improvement of Two-frame Particle Tracking Velocimetry Using a Hybrid Adaptive Scheme[J]. Measurement Science and Technology, 2002, 13(4): 573-582.
[8]KIMURA I,HATTORI A,UEDA M. Particle Pairing Using Genetic Algorithms for PIV[J].Journal of Visualization,2000,2(3/4):223-228.
(编辑:赵卫兵)
An Improved Hybrid Algorithm for Particle Image Velocimetry
WANG Tian1,FANG Hong-bing1,HUANG Hai-long2,WANG Chi2
(1.School of Electronic and Optical Engineering,Nanjing University of Science & Technology,Nanjing 210094,China;2.Nanjing Hydraulic Research Institute,Nanjing 210024,China)
As a new method of flow velocity measurement, particle image velocimetry (PIV) could obtain velocity information of the whole flow field without disturbing the flow field. The most critical step in PIV is particle matching. A hybrid algorithm combining cross-correlation algorithm and relaxation algorithm is proposed in view of the actual conditions of uneven distribution of particle density and different flow fields. The hybrid algorithm could search the particles more accurately so as to match the particles. The matching probabilities of three matching algorithms are compared and results suggest that the hybrid algorithm can analyze the motion state of particles more accurately and reduce the generation of error vectors. In addition, the relaxation algorithm is improved in this paper. By optimizing weighting factor, the running speed of the improved relaxation algorithm has greatly improved compared with the original algorithm, while the matching rate is basically consistent with the original algorithm.
velocity of flow field; particle image velocimetry; hybrid algorithm; particle tracking based on successive over relaxation; particle matching; matching probability
2016-03-16;
2016-04-14
中央级公益性科研院所基本科研业务费专项基金(2011YQ070055)
王 甜(1992-),女,江苏泰州人,硕士研究生,主要从事粒子图像测速方面的研究,(电话)13770327829(电子信箱)wt1179363754@163.com。
10.11988/ckyyb.20160234
2017,34(7):144-148
O359;X169
A
1001-5485(2017)07-0144-05
