基于人工路标的室内机器人导航方法①
2017-07-19张伟峰
黄 露, 朱 明, 张伟峰
(中国科学技术大学 信息科学技术学院, 合肥 230022)
基于人工路标的室内机器人导航方法①
黄 露, 朱 明, 张伟峰
(中国科学技术大学 信息科学技术学院, 合肥 230022)
在室内环境下, 以往的人工路标设计方案, 其识别算法复杂, 准确率较低, 而且难以满足实时性的要求. 针对这样的问题, 本文设计了两种新的人工路标: 定位人工路标和纠偏人工路标, 不仅可以有效地帮助室内移动机器人导航定位和纠偏, 而且具有识别简单快速的优点. 机器人实时识别定位人工路标, 并根据识别的纠偏人工路标来调整自身的位置和运动方向, 使得机器人可以沿着事先规划好的路径顺利前行. 通过实验表明, 在室内光线较暗、适中、强光三种光线条件下, 两种人工路标识别准确率高, 且识别速度快, 能够满足导航实时性的要求.
室内环境; 人工路标; 准确率; 实时性; 移动机器人; 导航
伴随着室内移动机器人研究水平的不断提高, 其应用范围也越来越广泛, 在人们生活和工业生产中发挥着重要的作用. 在室内移动机器人相关技术的研究中, 导航技术是其研究核心[1]. 在导航过程中, 常常面临无法预测的动态环境变化, 因此, 实现移动机器人自主导航是一项迫不及待的任务[2]. 为了实现这一任务, 首先要解决的是移动机器人实时准确定位的问题, 而视觉导航因其获取的信息量大, 已经逐渐成为移动机器人定位的首选导航方案[3].
目前, 机器人视觉导航的定位主要通过视觉传感器获取环境中具有明显特征的路标进行定位[3], 其中路标主要分为自然路标和人工路标. 从大量的文献来看,目前基于自然路标的视觉导航[4-7]受环境不确定因素影响大, 算法复杂, 相比于自然路标, 人工路标辅助机器人定位技术, 具有路标特征稳定、定位算法简单等优势[8], 因此, 近年来国内外研究人员开展了很多研究工作[9-16]. 文献[9-13]提出了基于二维码的人工路标, 虽然该路标包含的信息量大, 但是二维码的识别速度慢, 难以满足实时性的要求, 而且识别的准确率受机器人与二维码的距离影响较大. 文献[14]设计了一种AR-mark人工地标来进行机器人视觉导航, 但是当机器人与人工路标的距离大于1.5 m时, 人工路标的图像不清晰, 导致特征点检测误差大, 定位精度低, 可见在这种情况下, 无法满足机器人导航的准确性和实时性. 文献[15]中采用了一种对称矩形结构且含有数字的彩色人工路标, 其识别算法复杂, 整个识别过程的平均时间为0.2656 s, 无法很好地满足实时性的要求. 文献[16]提出了采用数字人工路标导航的移动机器人, 在不同的应用中分别采用批处理滤波器(Batch filter)和递归滤波器(Recursive filter)时, 均不能同时满足准确性和实时性的要求.
针对上述问题, 为了同时满足人工路标辅助机器人定位导航的准确性和实时性, 本文先从人工路标的设计着手, 设计了两种人工路标: 纠偏人工路标和定位人工路标(以下分别简称纠偏路标和定位路标), 且提出了快速有效的识别方法. 其中, 纠偏路标用于判断是否需要对运动中的机器人进行位置和方向上的调整; 定位路标用于确定机器人自身所处的目标位置, 并且可以被识别为对应着该位置的路标编码. 室内环境中, 在机器人所经过的各个目标位置的天花板上, 放置定位路标, 并且在定位路标之间放置纠偏路标. 根据机器人前进路径中各个定位路标对应的路标编码的关系, 进一步提出了路径规划表, 使得机器人可以沿着事先规划好的路径顺利完成导航任务. 最后, 通过实验验证了,识别纠偏路标和定位路标的快速性和准确性, 满足导航准确性和实时性的要求, 因此, 本文提出的基于人工路标的室内机器人导航方法具备可行性.
1 两种路标的设计和安放位置
1.1 纠偏人工路标的设计
本研究中室内机器人采用的是性能良好的步进电机, 虽然可以尽可能避免由于两个驱动轮转速不同而产生的方向改变, 但是由于机器人行驶过程中存在振动等干扰因素, 而使机器人偏离原有的运动方向, 难以保证其长距离直线行驶. 因此, 在机器人偏离原有运动方向的情况下, 需要对其进行纠正, 保证其能顺利到达目的地. 于是, 本研究设计了如图1所示的纠偏路标. 纠偏路标最外层采用的是黑色圆环结构, 内部有一条穿过圆环圆心并与圆环等宽的黑色直线区域.

图1 纠偏人工路标
1.2 定位人工路标的设计
本研究设计了黑白圆环结构的定位路标, 如图2所示.

图2 定位人工路标
从图示可见, 定位路标采用的是同心的黑白圆环结构, 规定每个圆环宽度相等, 而且最外层圆环是黑色的. 从圆环结构的最大外围轮廓到圆心, 由于每个黑色或白色圆环对应的宽度是相等的, 按照每个圆环对应的宽度, 依次将黑色圆环区域识别为1, 白色圆环区域识别为0, 这样就会将各个定位路标识别为对应的一串二进制路标编码. 当然, 本文没有设计全黑圆环结构的定位路标, 是防止其与纠偏路标均被识别为全1的二进制编码, 难以区分开来.
当需要更多的定位路标时, 可以在保证定位路标黑白圆环宽度相等, 以及最外层是黑色圆环的前提下,增加圆环的数目, 就可以达到增加定位路标数量的目的. 当定位路标的圆环数目为n时, 在定位路标的最外层圆环是黑色的情况下, 本研究最多可以设计出定位路标的总数量为Nc, 则Nc=2n-1-1. 显然, 随着定位路标圆环数目的增加, 设计的定位路标数量呈指数变化增加, 从而保证能设计出足够数量的定位路标. 在图2中,本研究选择定位路标的圆环数目n=4, 总的定位路标总数量为Nc=7.
1.3 两种路标的安放位置
在室内环境下, 将机器人经过的各个转弯路口和需要停驻的位置, 选择为目标位置. 在各个目标位置的天花板上, 设置相应的定位路标, 使其不易遭到人为因素的破坏. 在各个定位路标之间, 设置纠偏路标, 使定位路标和纠偏路标的中心点位于同一条直线上, 并且使纠偏路标的黑色直线区域垂直于该条直线.
怎么决定两个纠偏路标之间的距离L, 本文使用机器人的摄像头进行标定, 从而计算出这个距离L. 我们使用机器人自身的摄像头去采集天花板的图像, 如图3所示, 图像的外围轮廓是一个长为W的矩形, 这时恰好有一个纠偏路标位于图像的最左边, 右边恰好有一个纠偏路标不落在图像内, 在图像中纠偏路标的直径为D. 这时在天花板上设置两个纠偏路标的距离:

式(1)中d为纠偏路标的实际直径大小.

图3 纠偏路标距离标定示意图
2 两种人工路标的识别
在采集的图像中, 机器人首先要检测是否含有人工路标. 如何从采集的图像中检测到人工路标, 是识别人工路标的前提. 本文设计的两种人工路标采用的都是圆环结构, 于是采用OpenCV应用中的霍夫圆变换来检测图像中是否存在人工路标. OpenCV应用中的霍夫圆变换是一种圆特征提取技术, 作为相对简单的圆检测常用方法, 与一般的拟合圆算法比起来, 其优点在于:
(1) 与原始的标准霍夫圆变换算法相比, OpenCV应用中的霍夫圆变换采用灵活的霍夫梯度法, 将三维的累加平面转化为二维累加平面, 从而减少计算量, 缩短计算时间.
(2) 该方法采用统计投票的方法, 将图像空间中较为困难的全局检测问题转化为参数空间中相对容易解决的局部峰值检测问题. 也就是说, 工作的重点就是如何更准确、有效地检测出参数空间中共同投票区域的投票积累峰值, 提高了算法的执行速度, 执行起来效率很高.
(3) 该方法能够有效解决在三维累加器中产生许多噪声并使得结果不稳定的稀疏分布问题.
(4) 该方法对噪声点不敏感, 具有良好的抗干扰能力. 在检测圆形目标时, 具有受圆形曲线间断影响小的优点, 即使目标有稍许缺损或者污染也能被正确识别.
(5) 两种路标的半径是固定值, 从而能够准确、合理地设置该检测方法的半径参数, 使得圆检测速度快、效果好. 由于这两种人工路标都固定在天花板上,所以在采集的图像中, 这两种人工路标的最大外围半径是固定的. 本文设置定位路标与纠偏路标的最大外围半径不同, 这样就能通过检测方法的半径参数, 分别将两种人工路标快速地从采集的图像中检测出来.
综上可见, 本文采用OpenCV应用中的霍夫圆变换进行检测人工路标具有合理性. 而且, 圆环结构的人工路标使本文不需要考虑人工路标与机器人的相对方位,机器人从各个方位都可以识别人工路标.
2.1 定位路标转换成路标编码
机器人利用摄像头采集天花板上的图像, 检测存在定位路标后, 对采集的图像进行一系列的图像处理,得到定位路标对应的路标编码. 识别定位路标的具体步骤如下:
(1) 检测定位路标是否存在: 首先, 合理设置好霍夫圆变换的半径参数. 然后, 对机器人采集的图像进行灰度处理, 当采集的图像中存在定位路标时, 霍夫圆变换就能快速检测到定位路标, 得到定位路标中同心圆环的圆心O和最大外围轮廓的半径R.
(2) 二值化操作: 接下来对该灰度图像做二值化处理, 实现了对图像灰度较小和较大的噪声进行了滤波处理, 将图像上像素点的灰度值设置为0或255.
(3) 腐蚀和膨胀: 当二值化后的图像区域有一些误判的空洞, 散布着一些干扰噪声, 所得到的物体图像的轮廓并不光滑, 这样的情况下, 连续数次的腐蚀迭代和相同次数的膨胀操作后, 可以明显的达到改善这种情况的目的, 达到滤除一定噪声的目的.
(4) 得到路标编码: 经过上述处理后, 定位路标中黑色圆环区域的灰度值为0, 白色区域的灰度值为255.同心圆环结构的定位路标从最大的黑色外围轮廓到圆心, 按照每个圆环对应的宽度, 依次将灰度值为0的黑色圆环区域识别为1, 灰度值为255的白色圆环区域识别为0, 这样就会得到一串二进制编码, 即得到定位路标对应的路标编码.
图2中的定位路标通过上述识别过程, 分别得到对应的路标编码, 如表1所示.

表1 定位路标与路标编码对应表
2.2 纠偏路标实现位置和方向纠正
本文利用纠偏路标来判断是否需要对机器人作位置和运动方向上的调整, 具体的步骤如下:
(1) 调整机器人的位置: 合理设置好霍夫圆变换的半径参数, 并且对采集的图像进行灰度处理. 当采集的图像中存在纠偏路标时, 霍夫圆变换就能快速检测到纠偏路标, 得到纠偏路标中同心圆环的圆心坐标(X0,Y0)和最大外围轮廓的半径R0. 同时记录此时该采集图像中心点坐标(X1, Y1). 利用纠偏路标在采集图像中的圆心坐标(X0, Y0)与图像中心点坐标(X1, Y1)的距离和角度关系, 判断是否需要对机器人的位置进行调整, 如果需要调整, 便将机器人朝着纠偏路标的正下方进行移动. 机器人移动的同时, 不断采集图像, 反复进行上述过程, 直到机器人移动到纠偏路标的正下方为止.
此时的机器人已经位于纠偏路标的正下方了, 但是方向可能已经不朝着下一目标位置了. 于是, 需要对机器人的方向做出判断, 并决定是否需要调整.
(2) 截取纠偏路标: 再次利用霍夫圆变换就能快速检测到纠偏路标, 得到纠偏路标中同心圆环的圆心坐标(X00, Y00)和最大外围轮廓的半径R00; 利用圆心坐标(X00, Y00)和半径R00这两个参数, 便可以将纠偏路标从采集图像中截取出来, 而不改变它的大小和形状.
(3) 调整机器人方向: 对截取的纠偏路标, 使用canny边缘检测算法得到其边缘轮廓, 再对其进行二值化操作, 然后利用霍夫线变换找到其边缘轮廓的直线,利用该直线方向与机器人前进方向的夹角关系, 调整机器人的方向.
经过上述步骤的调整, 机器人便位于纠偏路标的正下方, 而且运动方向朝着下一定位路标了.
3 提出导航方法
3.1 将目标位置与定位路标绑定
在室内各个目标位置的天花板上, 设置不同的定位路标, 从而将各个目标位置与定位路标进行绑定, 建立目标位置与定位路标一一对应的关系. 在如图4所示的室内定位路标布局图中, 一共有A、B、C、D、E、F、G七个目标位置, 并在每个目标位置分别对应设置了图2中所示的定位路标, 定位路标的地址编码在图4中相应标出, 并且用箭头标注出目标位置A到G、A到E和A到F这三条运动路径.

图4 室内定位路标布局图
3.2 建立路径规划关系表
本文将利用目标位置与定位路标绑定的对应关系,建立机器人在室内各个目标位置之间的路径规划关系表. 路径规划关系表中包含了机器人经过的路标编码信息、运动指令及标志. 这些运动指令及标志如表2所示. 其中, “AngleValue”表示机器人转弯的角度值.

表2 运动指令及标志
接下来, 将用路标编码、运动指令及标志描述路径规划关系, 形成规划关系表, 如表3 所示.
在表3中, 用+连接机器人经过的每一个路标编码和将要执行的运动指令及标志; 用标志A表示机器人的前进方向; 标志B表示机器人返回方向; 用END表示机器人到达目的后停止运动; 用BACK表示机器人到达目的后再原路返回, 继续回到出发点. 当机器人在出发点和目的地之间往返经过同一人工路标时, 可通过查询规划关系发出相对应的正确指令. 比如, 机器人的运动路径是A到E到A, 其运动方向为前进方向(方向标志为A), 当它经过刚好经过B位置时, 识别出了路标编码为1001的定位路标, 这时查询路径规划关系表, 得到的运动指令为为R 90 F , 于是机器人便先右转90度, 再继续前进.

表3 路径规划关系表
3.3 利用规划关系表导航
在室内环境下, 行进中的机器人采集图像, 检测图像中是否存在人工路标. 当检测到纠偏路标存在时, 判断是否需要对自身位置和行进方向做出调整, 如果需要, 便进行调整; 当检测到定位路标时, 首先识别获得路标编码, 根据路标编码和自身的运动方向标志, 去查询规划关系表, 发出相应的运动指令, 从而按照事先规划好的路径完成导航任务. 这样的导航过程, 可用如图5所示的流程图表示出来.
4 实验论证
本文采用如图6所示的室内机器人来完成系统实验. 该机器人采用步进电机提供动力, 使用编码器反馈机器人转动的角度, 其运行速度为0.50 m/s, 并且采用300万像素的摄像头来采集天花板图像, 配备CPU为1.86 GHz、运行内存为2 GB的PC机. 人工路标导航方案的关键在于路标能否被较好识别[9], 因此下面将进行两种路标的识别准确性和实时性的实验.
4.1 定位路标识别实验
4.1.1 定位路标光线干扰实验
为了不赘述, 本文只展示两个定位路标在光线强度改变时的三组实验效果, 如图7所示, 这三组实验机器人的摄像头距离天花板都为2.0 m. 在光线强度比较暗的时候, 采集的图像如图7(a1)、图7(b1)所示; 在光线强度适中的时候, 采集的图像如图7(c1)、图7(d1)所示;当机器人的摄像头受到强光照射干扰的时候, 采集的图像如图7(e1)、图7(f1)所示. 按照2.1节中识别定位路标的方法, 本文检测到定位路标的位置, 标定出最大的外围圆轮廓和圆心, 效果图分别如图7(a2)、图7(b2)、图7(c2)、图7(d2)、图7(e2)、图7(f2)所示. 这两种定位路标都能被正确快速地识别为相应的路标编码1001和1110.
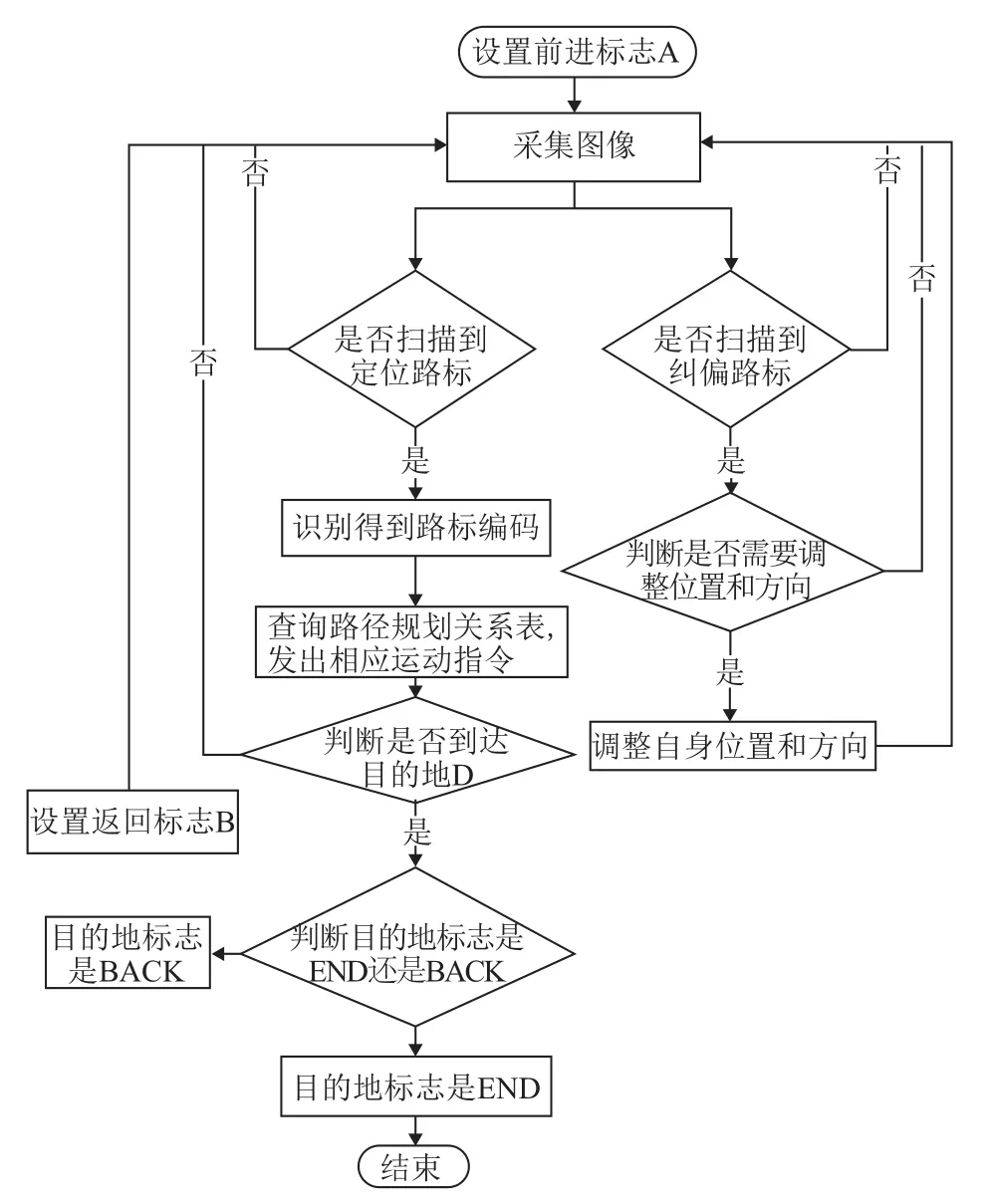
图5 机器人导航流程图
接下来, 在光线较暗、适中、强光干扰三种不同光线条件下, 且机器人摄像头距离天花板2.0 m、3.0 m、4.0 m的情况下, 分别采集50幅含有定位路标的图像, 又做了对比实验, 进行测试定位路标在光线干扰下的识别速度和准确率, 表4给出了实验数据.

图6 室内机器人

图7 定位路标光线干扰实验效果图
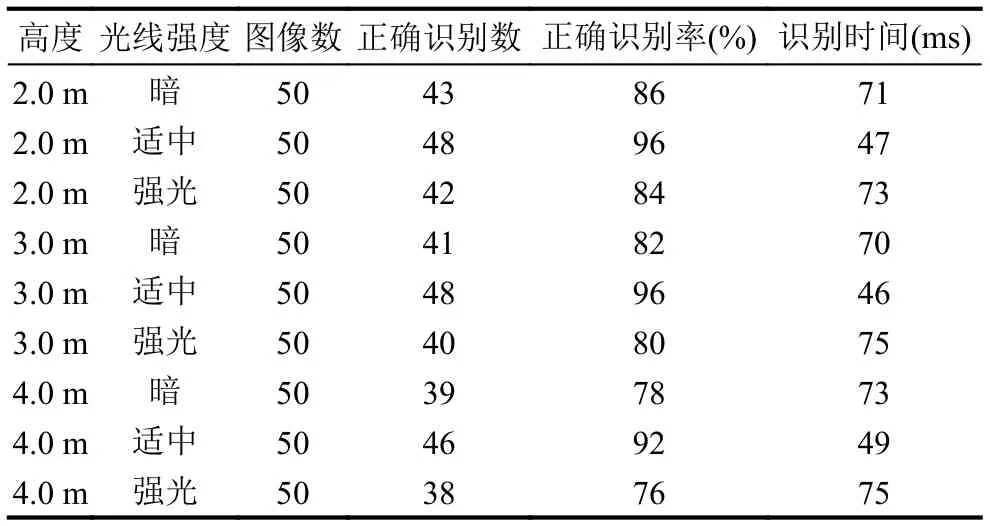
表4 定位路标光线干扰实验数据
4.1.2 定位路标背景干扰实验
为了不赘述, 本文只展示两个定位路标在天花板背景环境改变时的实验效果. 实验在光线强度适中的条件下进行, 且机器人的摄像头距离天花板都为2.0 m.在天花板背景简单干净时, 采集的图像如图7(c1)、图7(d1)所示; 当在天花板背景复杂时, 采集的图像如图8(a1)、图8(b1)所示. 按照2.1节中识别定位路标的方法, 本文检测到定位路标的位置, 标定出最大的外围圆轮廓和圆心, 效果图分别如图7(c2)、图7(d2)、图8(a2)、图8(b2)所示. 这两种定位路标都能被正确快速地识别为相应的路标编码1001和1110.

图8 定位路标背景干扰实验效果图
接下来, 在光线适中且机器人摄像头距离天花板2.0 m、3.0 m、4.0 m的情况下, 分别在天花板背景简单干净和复杂的情况下, 采集50幅含有定位路标的图像, 又做了对比实验, 进行测试定位路标在天花板背景环境干扰下的识别速度和准确率, 表5给出了实验数据.

表5 定位路标背景干扰实验数据
4.2 纠偏路标识别实验
4.2.1 纠偏路标光线干扰实验
下面将展示纠偏路标的光线干扰实验效果. 这三组实验机器人的摄像头距离天花板都是2.0 m. 在光线比较暗、光线强度适中以及当机器人的摄像头受到较强灯光照射干扰的时候, 分别进行实验, 采集的图像经过霍夫圆变换定位后, 标定出最大的外围圆轮廓和圆心, 效果图分别如图9(a1)、图9(b1)、图9(c1)所示. 在这三种情况下, 分别截取纠偏路标, 使用canny边缘检测算法得到其边缘轮廓, 其效果图分别如图9(a2)、图9(b2)、图9(c2)所示.

图9 纠偏路标光线干扰实验效果图
在光线较暗、适中、强光干扰三种不同光线条件下, 且机器人摄像头距离天花板2.0 m、3.0 m、4.0 m的情况下, 分别采集50幅含有纠偏路标的图像, 进行对比实验, 测试纠偏路标在光线干扰下的识别速度和准确率, 表6给出了实验数据.
4.2.2 纠偏路标背景干扰实验
下面将展示纠偏路标在天花板背景环境改变时的识别实验效果. 实验在光线强度适中的条件下进行, 且机器人的摄像头距离天花板为2.0 m. 在天花板背景复杂的时候进行实验, 采集的图像经过霍夫圆变换定位后, 标定出最大的外围圆轮廓和圆心, 效果图如图10(a1)所示; 在天花板背景环境简单干净时, 经过相同的处理后, 对应的效果图如图9(b1). 在这三种情况下, 分别截取纠偏路标, 使用canny边缘检测算法得到其边缘轮廓,其效果图分别如图9(b2)、图10(a2)所示.
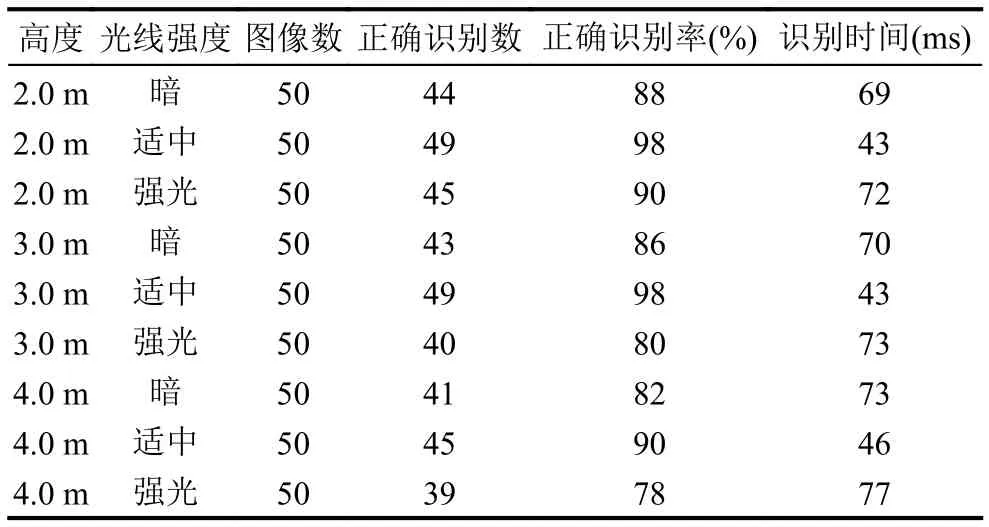
表6 纠偏路标光线干扰实验数据

图10 纠偏路标背景干扰实验效果图
接下来, 在光线适中且机器人摄像头距离天花板2.0 m、3.0 m、4.0 m的情况下, 分别在天花板背景简单干净和复杂的情况下, 采集50幅含有纠偏路标的图像, 又做了对比实验, 进行测试纠偏路标在天花板背景环境干扰下的识别速度和准确率, 表7给出了实验数据.

表7 纠偏路标背景干扰实验数据
上述的两组实验结果显示:
(1) 在机器人摄像头距离天花板2.0 m、3.0 m、4.0 m三种高度和在光线较暗、适中、强光干扰三种光线条件下, 定位路标和纠偏路标的正确识别率分别在76%-96%、78%-98%之间, 识别时间分别在46 ms-75 ms、43 ms-77 ms之间.
(2) 在机器人摄像头距离天花板2.0 m、3.0 m、4.0 m三种高度和在天花板背景简单干净和复杂的情况下,定位路标和纠偏路标的正确识别率分别在90%-96%、86%-98%之间, 识别时间分别在46 ms-54 ms、43 ms-52 ms之间.
因此实验表明, 识别两种路标的正确率和速率受摄像头距离路标的高度变化、光线条件变化以及天花板背景变化影响较小, 即识别两种路标的方法对摄像头距离路标的高度变化、光线变化以及天花板背景变化具有很强的鲁棒性, 从而识别路标的正确率和速率完全能够满足导航准确性和实时性的要求.
4.3 综合性能比较
针对文献[9-15]和本文设计的人工路标, 结合各个实验平台的硬件配置, 在表8中给出了对比数据, 其中,“*”表示该文献中未提高该项数据, 表中的识别率和识别时间均为平均值.

表8 人工路标识别的综合性能对比
针对基于二维码的人工路标, 表8中给出了具有代表性的文献[10]中的数据, 在实验平台采用30万像素的摄像头, CPU主频为3 GHz、内存为512 MB的情况下,识别路标时间大于2.5 s, 有效识别距离小于3 m, 可见,基于二维码的路标识别速度慢, 而且有效识别的距离有限. 文献[14]中采用的是30万像素的摄像头, AR-mark人工路标的识别距离同样有限, 当识别距离大于1.5 m时, 定位精度低, 无法满足机器人导航准确性的要求. 文献[15]中在采用30万像素的摄像头时, 对称彩色人工路标的平均识别时间为0.2656 s, 无法很好地满足实时性的要求. 文献[16]提出了采用数字人工路标导航的移动机器人, 实验平台的硬件数据在文中没有介绍,当分别采用批处理滤波器(Batch filter)和递归滤波器(Recursive filter)时, 均不能同时满足准确性和实时性的要求. 因此, 综合比较来说, 本文在实验平台硬件性能未明显提高的情况下, 新提出的人工路标识别正确率达到了89%, 识别时间仅为58 ms, 可见, 本文提出的基于人工路标的室内机器人导航方法完全能够满足导航准确性和实时性的要求.
5 结语
针对文献[9-16]中设计的人工路标, 普遍存在准确率低和识别速度慢的问题, 本研究设计了两种新型的人工路标: 定位路标和纠偏路标, 并提出了相应简单快速的识别方法, 并通过实验验证了, 识别两种路标的方法对高度变化、光线变化以及天花板背景环境变化具有很强的鲁棒性, 完全能够满足导航准确性和实时性的要求. 通过利用室内目标位置与定位路标之间一一对应关系, 建立机器人在室内各个目标位置之间的路径规划关系表. 行进中的机器人当检测到定位路标时,首先识别获得路标编码, 然后查询规划关系表, 发出相应的运动指令, 从而机器人就可以沿着事先规划好的路径前行, 完成导航任务. 总之:
(1) 两种路标放置位于室内天花板上, 不易遭到人为等因素破坏, 稳定性好. 其中, 定位路标放置在机器人需要停驻的位置和经过的路口, 其采用的设计结构,通过增加圆环数目, 可以产生足够数量且唯一的人工路标, 以保证满足更大范围和更多路口的室内环境.
(2) 准确、实时的人工路标识别方法. 不仅人工路标识别距离远, 而且识别速度快、准确率高, 对高度变化、光线变化以及天花板背景环境变化具有很强的鲁棒性. 在不同光线条件下, 即使机器人的摄像头与人工路标的距离达到4.0 m, 仍然能够准确实时地识别出人工路标.
(3) 设计了基于路标编码的路径规划关系表. 当机器人识别出行走路径上的定位路标, 得到路标编码, 查询规划关系表, 就能获得接下来的行走方向, 从而机器人就可以沿着事先规划好的路径前行, 完成室内自主导航任务.
本文下一步将继续优化人工路标的识别方法, 进一步提高在光线昏暗和强光情况下的正确识别率, 使机器人在室内更好地完成自主导航任务.
1王志文, 郭戈. 移动机器人导航技术现状与展望. 机器人,2003, 25(5): 470–474.
2陆新华, 张桂林. 室内服务机器人导航方法研究. 机器人,2003, 25(1): 80–87.
3刘振宇, 姜楠, 张令涛. 基于人工路标和立体视觉的移动机器人自定位. 计算机工程与应用, 2010, 46(9): 190–192, 211.
4唐琎, 白涛, 蔡自兴. 移动机器人的一种室内自然路标定位法. 计算机工程与应用, 2005, 41(15): 44–47, 185. [doi:10.3321/j.issn:1002-8331.2005.15.013]
5陈明芽, 项志宇, 刘济林. 单目视觉自然路标辅助的移动机器人定位方法. 浙江大学学报(工学版), 2014, 48(2): 285–291.
6Sun YD, Ding N, Qian HH, et al. Real-time monocular visual self-localization approach using natural circular landmarks for indoor navigation. Proc. 2012 IEEE International Conference on Robotics and Biomimetics(ROBIO). Guangzhou, China. 2012. 495–500.
7Lu Y, Song DZ. Visual navigation using heterogeneous landmarks and unsupervised geometric constraints. IEEE Trans. Robotics, 2015, 31(3): 736–749. [doi: 10.1109/TRO.2015.2424032]
8唐恒博, 陈卫东, 王景川. 基于多元M序列的人工路标设置方法. 机器人, 2014, 36(1): 29–35.
9王孙平, 田乔, 傅世忱, 等. QR码导航的室内目标搜寻机器人研究. 计算机系统应用, 2014, 23(1): 193–196.
10姜海涛, 田国会, 薛英花, 等. 新型人工地标的设计、识别、定位及应用. 山东大学学报(工学版), 2011, 41(2): 107–113, 118.
11George L, Mazel A. Humanoid robot indoor navigation based on 2D bar codes: Application to the NAO robot. Proc.13th IEEE-RAS International Conference on Humanoid Robots (Humanoids). Atlanta, GA, USA. 2013. 329–335.
12Zhang S, Sun L, Dong L, et al. Initial location calibration of home service robot based on 2-dimensional codes landmarks.Proc. 33rd Chinese Control Conference (CCC). Nanjing,China. 2014. 8315–8320.
13Lee SJ, Tewolde G, Lim J, et al. QR-code based Localization for Indoor Mobile Robot with validation using a 3D optical tracking instrument. Proc. 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM).Busan, Korea. 2015. 965–970.
14丁娜娜, 田国会, 李国栋, 等. 基于人工地标的双足机器人视觉自定位. 山东大学学报(工学版), 2013, 43(4): 51–56.
15Guo Y, Xu XH. Color landmark design for mobile robot localization. Proc. IMACS Multiconference on Computational Engineering in Systems Applications. Beijing, China.2006. 1868–1874.
16Shen JL, Hu HS. Mobile robot navigation through digital landmarks. Proc. 10th Chinese Automation & Computing Society Conference. Liverpool, England. 2004. 117–124.
Navigation Method for Indoor Robot Based on Artificial Landmark
HUANG Lu, ZHU Ming, ZHANG Wei-Feng
(School of Information Science and Technology, University of Science and Technology of China, Hefei 230022, China)
In the indoor environment, the previous artificial landmark design scheme is complex in recognition algorithm with low accuracy, and it is hard to meet the real-time requirements. In view of such problems, two new kinds of artificial landmarks are designed in this paper: location artificial landmark and correction artificial landmark, which can not only help the indoor mobile robot to navigate and rectify, but also have the advantages of simple and rapid identification. The robot can identify location artificial landmark in real time, and adjust its position and movement direction according to the correction artificial landmark, so that the robot can move forward smoothly along the planned path. Experiments show that in dark, moderate, strong light indoors, the recognition of two kinds of artificial landmark is highly accurate and fast,which can meet the requirements of real-time navigation.
indoor environment; artificial landmark; accuracy rate; real time; mobile robot; navigation
黄露,朱明,张伟峰.基于人工路标的室内机器人导航方法.计算机系统应用,2017,26(7):1–9. http://www.c-s-a.org.cn/1003-3254/5879.html
中科院先导项目课题(XDA06011203)
2016-11-20; 收到修改稿时间: 2017-01-04
