多UCAV超视距协同空战中的交接制导方法
2017-07-18周德云
周德云,杨 振,张 堃
(西北工业大学 电子信息学院,陕西 西安 710129)
多UCAV超视距协同空战中的交接制导方法
周德云,杨 振,张 堃
(西北工业大学 电子信息学院,陕西 西安 710129)
针对UCAV隐身性与机动性好但同时通信易受干扰且智能化程度较低的特性,提出了多UCAV超视距协同空战的作战模式。针对该模式下需要将空空导弹的中制导权移交给友机的问题,给出了交接制导方法。分析了交接制导的过程,结合超视距协同空战的特点,分别建立了UCAV对待交接导弹以及该导弹所攻击目标的态势优势模型,在此基础上构建了UCAV的综合制导优势模型。根据该模型设计了制导权移交策略,采用粒子群算法进行了优化求解,实现了制导权在多UCAV内部的合理交接,在一定程度上提高了UCAV的生存能力和自主决策能力。仿真结果验证了所提方法的可行性及有效性。
多无人作战飞机协同;空空导弹;超视距空战;交接制导
无人作战飞机(Unmanned Combat Air Vehicle,UCAV)作为新兴的作战力量在战争中的地位日益提高[1]。与有人作战飞机相比,UCAV没有驾驶员、座舱及相应的生命保障系统,使用过载更高,气动效率更好,外形和横截面的设计自由度更大,这些特点保证了UCAV突出的机动性和隐身性优势[2-3]。近年来,在高技术条件下的信息化战场上UCAV逐渐向着具有攻击和杀伤能力的方向迅速发展。同时为适应当前网络化作战环境中作战任务复杂多样性的特点和达到态势共享、任务协同、合作式攻击的战术要求,将多架UCAV组成编队协同作战已成为各军事大国竞相研究和发展的热点[1,4]。
目前,UCAV在实战中主要应用于侦查预警、防空压制、通信支援、高风险目标突防以及对地攻击等作战任务[1],而尚未形成对空作战能力。其主要原因在于,现阶段UCAV的智能化程度较低、对战场变化反应能力弱、对卫星及地面站依赖性强,使其在未来较长一段时间内,还难以取代有人机投入到瞬息万变的近距格斗型空战中。对此,本文考虑将多UCAV协同应用于超视距空战中,使用中/远距空空导弹作为机载武器,在指挥中心的统一指挥下实现先敌发现、先敌发射,即充当空中“射手”的角色,从而避免复杂的格斗型空战。同时,战术数据链[5]和航空电子系统的迅猛发展以及第四代超视距空空导弹的出现也为这种空战模式提供了可能。
在现代战争中,中/远距空空导弹一般采用“程序制导(惯导)+指令修正中制导+主动寻的末制导”的复合制导方式[6-7],但这种制导方式对载机依赖性较强。如果载机受到攻击或通信链路受到干扰而不得不放弃制导任务时,可能会导致无法截获目标。而在多UCAV协同作战的条件下,则可以将载机的制导权移交给编队内的友机,从而维持对导弹持续稳定的制导。这样不仅大幅提升了UCAV空战的生存力和整体作战效能,也促进了战术的灵活性。
目前,国外关于多机协同交接制导[8-10]的理论研究还比较少见。其中文献[8]基于多模型自适应滤波提出了对来袭寻的导弹进行防卫的协同制导律;文献[9]在假设目标的加速度和量测噪声范围界限已知的基础上提出了一种导弹拦截的协同制导律;文献[10]基于目标的不确定性机动和区域防空的概念设计了防空应用中的协同制导律,而此类协同制导律中并未研究导弹制导平台的切换问题。公开的文献中,目前仅有美军AIM-120空空导弹被报道[11]过具备协同交接制导能力,但在实战中未见使用。
国内对于空战协同交接制导[6-7,12-14]也进行了相关的理论性研究。文献[6]研究了双机编队协同制导的火控机理,并给出了其过程描述。文献[7]研究了多机空战协同制导平台的选取方法,并分析了制导切换的方式,但并未考虑我方飞机对待交接导弹的制导优势。文献[12]针对超视距空战中的多机协同制导问题给出了制导优势模型,但模型中敌机及其导弹的性能参数在实际中往往难以准确得到。文献[13]重点研究了大规模空空导弹制导权移交问题的快速寻优解法,而对于制导权优势建模并未深入讨论。文献[14]提出了利用“虚拟目标”法对交接制导中的突变信息进行渐进处理,使中制导交接能够平稳进行。
本文从当前UCAV的性能特点出发,提出了一种多UCAV超视距协同空战模式,针对其中的制导交接问题,分别从UCAV对导弹和对目标两方面建立了详细的制导优势模型,并采用粒子群算法对所设计的制导权移交策略进行了优化求解,为合理的交接决策提供了理论依据。
1 交接制导的过程分析
多UCAV超视距协同空战中,一个典型的交接制导过程如图1所示。
首先n架UCAV组成编队在地面或空中指挥中心的指挥引导下进入作战空域,编队间通过数据链实现信息共享。当敌方目标1被我方UCAV1发现并进入机载空空导弹的攻击区时,即发起攻击。导弹发射后首先进入初始程序制导段,在中制导段开始时,UCAV1用机载雷达对目标1和导弹进行跟踪、照射。该阶段容易被敌方(目标2)发现并受到攻击(或者通信链路受到干扰),当UCAV1被目标2雷达锁定并收到告警信号时,随即撤出制导并进行机动规避。转由编队内制导优势最大的UCAVn对目标1进行照射,并将目标1的相关信息形成修正指令传给导弹,直至弹上的主动导引头捕获目标,转入最后的末制导段,完成制导交接。
从上述过程描述中可以看出,由于每架UCAV的战场相对态势不同,从而对导弹实施中制导的能力也并不完全一样,这种制导能力称为制导优势[7]。本文建立了详细的综合制导优势模型,并据此给出合理的交接制导决策。
2 综合制导优势模型
综合制导优势主要包括编队内各架UCAV对待交接导弹的态势优势和对该导弹所攻击目标的态势优势。由于本文假定编队内UCAV型号均相同,故空战效能优势[7]在此不作考虑。
2.1 UCAV对导弹的态势优势
UCAV对导弹的制导优势包括角度优势和距离优势,其相对态势如图2所示。图2中,qf和qj分别为导弹的方位角和进入角,vu和vm分别为UCAV和导弹的速度,d为UCAV与导弹的距离。其中UCAV与导弹的通信方式包括头部照射和尾部照射,当0≤|qf|≤90°时采用头部照射,当90°<|qf|≤180°时采用尾部照射[15]。UCAV要完成对导弹的制导,在相对态势上需同时满足以下3个约束条件:①导弹需位于UCAV指令天线的最大搜索角(qf,max)范围内;②UCAV需位于导弹尾部天线工作的最大锥角(qj,max)范围内;③导弹与UCAV的距离不能超过机载雷达的最大制导距离(dmax)。
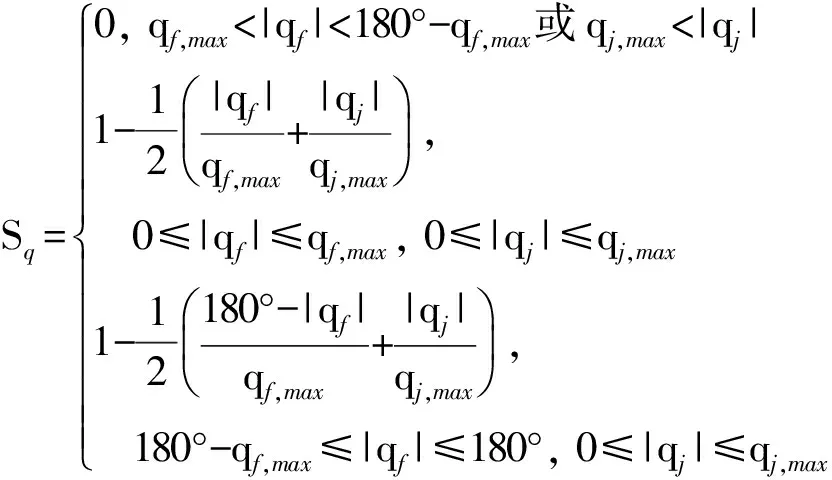
(1)
若制导机采用头部照射,则当|qf|=0且|qj|=0时角度优势值最大,Sq=1;当|qf|=qf,max且|qj|=qj,max时角度优势值最小,Sq=0。若制导机采用尾部照射,则当|qf|=180°且|qj|=0时角度优势值最大,Sq=1;当|qf|=180°-qf,max且|qj|=qj,max时角度优势值最小,Sq=0。其他情况下,制导机与导弹之间无法正常通信,角度优势为0。
根据距离约束条件可知,距离优势会随着导弹与制导机距离的增大而减小,于是本文使用文献[13]中的方法将距离优势建模为
(2)
当3个约束条件均满足时,UCAV才能对导弹进行制导,于是建立UCAV对导弹的态势优势为
(3)
式中:α1+α2=1,0≤α1≤1,0≤α2≤1,α1和α2由专家经验值给出,本文取α1=α2=0.5。
2.2 UCAV对目标的态势优势
参与交接制导的UCAV相对于被攻击目标的态势优势越明显,其所处的交接环境就越有利,制导能力也就越强。UCAV协同空战中与目标的相对态势如图3所示。
图3中,Qf和Qj分别为目标的方位角和进入角,vu和vt分别为UCAV和目标的速度,D和Δh分别为UCAV与目标的距离和高度差,vc为UCAV与目标在视线上的接近速度。
超视距空战中,为实现对目标的有效跟踪且同时避免被敌方攻击,应保证相对目标角度占优。其中Qf越大,则导弹离轴角越大,相应的攻击范围减小,优势变小。而Qj越大,则导弹的攻击区范围越大,优势增大[16]。据此,本文结合机载雷达最大探测角(qr)、导弹最大离轴发射角(qm)、导弹最大不可逃逸圆锥角(qk)以及相对几何态势,使用文献[17]中方法对方位角优势SQf与进入角优势SQj分别进行建模,其中引入了文献[18]中优势区、均势区和逃避区的划分原理进行角度分界,即:
(4)
(5)
因为目标方位角和进入角对态势优势的影响有较强的耦合关系,故建立角度优势函数为
(6)
式中:权值系数β1+β2=1,0≤β1≤1,0≤β2≤1。由于当Qf较小时,Qf对角度优势影响较大;Qf较大时,Qj对角度优势影响较大[16]。本文据此特性对传统的常数权值进行改进,令β1=(k1-|Qf|)/k2,使β1随|Qf|的增大而减小,同时β2随之增大,其中k1和k2由专家经验值给出。本文取k1=225,k2=270。
传统的距离优势建模中,通常将导弹的攻击区视为球形,而实际却与此相差甚远。其中Qj对攻击区的影响最大,所以本文参考文献[17]中方法,同时将Qj引入到距离优势中建模为
(7)
式中:Rr为机载雷达最大探测距离,Rm为导弹最大攻击距离,Rk,max为导弹最大不可逃逸区最大距离,Rk,min为导弹最大不可逃逸区最小距离,c为与Qj相关的约束系数。导弹的实际攻击区边界会随着进入角|Qj|的减小而递减,即迎头攻击时最大,侧向攻击时次之,尾追时最小。据此特性将c定义为
(8)
式中:λ为常值,其值决定不同导弹攻击区边界随进入角变化的幅度,本文取λ=260。
根据空战经验可知,当UCAV角度占优时,D越小,优势越大;而当UCAV角度处于劣势时,D越大,优势越大。故当角度占优时,应使vc>0,以减小相对距离;而角度处于劣势时,应使vc<0,以增大相对距离。据此建立符合上述特征的类似反正切函数形式的速度优势为
(9)
超视距空战中,其他条件一致,而UCAV适度高于目标时,则其态势会更优。但Δh过大也会对UCAV和导弹的性能产生影响,并且使导弹攻击目标时,需要在垂直面内作大幅机动。据此建立符合上述特征的高度优势函数为
(10)
式中:Δhp为UCAV与目标的最佳高度差,Δh在Δhp附近时高度优势取得较大值,反之取得较小值;ω为常值,其值决定高度优势曲线的变化,本文取ω=1.5。
综上所述,并考虑到空战中角度与距离优势的强耦合性,建立UCAV相对目标的态势优势为
(11)
式中:λ1+λ2+λ3=1,0≤λ1≤1,0≤λ2≤1,0≤λ3≤1;βQ+βD=1,0≤βQ≤1,0≤βD≤1,可由专家经验值给出。结合超视距空战的特点,本文取λ1=0.6,λ2=0.2,λ3=0.2,βQ=0.5,βD=0.5。
2.3 UCAV的综合制导优势
综合UCAV分别对导弹和目标的态势优势,可得UCAV的综合制导优势:
S=ε1·SM+ε2·ST
(12)
式中:ε1,ε2分别为UCAV对待交接导弹和该导弹所攻击目标的态势优势的权值系数,且有ε1+ε2=1,0≤ε1≤1,0≤ε2≤1,本文取ε1=0.6,ε2=0.4。
3 制导权移交策略
3.1 制导权移交模型
假设空战中,我方UCAV有M架,敌机有N架,某一时刻有K枚导弹需要制导交接,其中第j枚导弹攻击第j架敌机。通过上述计算方法,可根据第i架UCAV分别对第j枚导弹和第j架敌机的态势优势得到其综合制导优势值Sij。这里,i∈I,I={i|i=1,2,…,M且i∉t},t为请求交接制导的UCAV编号集合;j=1,2,…,K。
制导权移交的任务就是寻找一组解xij,使得总体制导优势最大,同时满足各种约束条件。即:
(13)
约束条件为
(14)
(15)
xij∈{0,1}
(16)
式(14)表示每枚导弹只选择一架UCAV进行制导交接,式(15)表示第i架UCAV最多制导Li枚导弹,式(16)表示第i架UCAV是否执行对第j枚导弹的制导交接任务,1为是,0为否。可以看出,制导权移交模型是一个典型的非线性规划模型,该模型的求解复杂度会随着维数(待交接导弹数、可执行制导任务的UCAV数和单架UCAV最多所能制导的导弹数)增加而呈指数级增加,穷举法将难以应对。
3.2 基于粒子群算法的制导权移交策略
对于3.1节中的非线性规划模型,当前广泛采用遗传算法、粒子群算法等智能算法及其组合优化算法进行求解,由文献[19]可知,粒子群优化算法在寻找最优解效率上要优于遗传算法,时效性更好。因此本文采用粒子群优化算法[20]对上述模型进行寻优求解。根据需要交接制导的导弹数量,令粒子维度为K。考虑到粒子搜索过程中的连续性和随机性,将粒子的位置向量编码为I中元素的“指针”形式:(p1,p2,…,pj,…,pK),其中pj表示将第j枚待交接导弹的制导任务移交给I中第pj个元素所代表的UCAV。然后将相应的xij置为1,再代入到式(13)中求解适应度值。
应用粒子群算法求解制导权移交模型,主要有以下2个问题:①粒子在位置、速度更新时会出现小数;②在搜索过程中会出现不满足约束条件的解。对此,本文将算法做出以下改进:对于小数问题,以“取整”的方式保证取值的合理性。对于不满足约束条件的解,可以将其所求得的制导优势重置为0。本文仿真中设置种群大小为10,迭代次数为50,学习因子均设为2,最大和最小速度分别设为1和-1。
4 仿真结果与分析
为了方便描述空战态势和制导优势,本文仿真中设置如下空战场景:我方空战编队由相同型号的7架UCAV组成(U1,U2,…,U7);水平初始位置分别为(0,20),(8,20),(15,20),(20,20),(20,15),(20,8),(20,0),单位为km;初始高度均为5 km;速度均为320 m/s。敌方由4架飞机(T1,T2,T3,T4)构成;水平初始位置分别为(120,130),(125,125), (130,120),(135,115),单位为km;初始高度均为7 km;速度均为380 m/s。导弹速度为1 km/s。
文中相关参数:qf,max=70°,qj,max=35°,dmax=100 km,qr=70°,qm=40°,qk=20°,Rr=150 km,Rm=110 km,Rk,max=55 km,Rk,min=20 km,Δhp=2 km,Li=2。
整个超视距协同空战过程中的UCAV、敌机和导弹的飞行轨迹如图4所示。
图4中UCAV分别为U1,U2,…,U7;导弹分别为M1,M2,M3,M4;敌机分别为T1,T2,T3,T4。仿真中的攻击方案为:U3发射M1攻击T1,U4发射M2和M3分别攻击T2和T3,U5发射M4攻击T4,其中导弹采用经典比例导引法[21]制导。敌机作相应机动飞行,我方UCAV编队散开,各自追踪敌机。空战过程中,U4和U5受到敌机T3的攻击,并在第115s时请求交接制导进行机动规避。
按照本文的计算方法,得到该时刻编队内UCAV的综合制导优势如表1所示,其中M2、M3、M4为待交接导弹,U4和U5因受到攻击而撤出制导,U3由于已制导M1,故其只能再接受一枚导弹的交接任务。
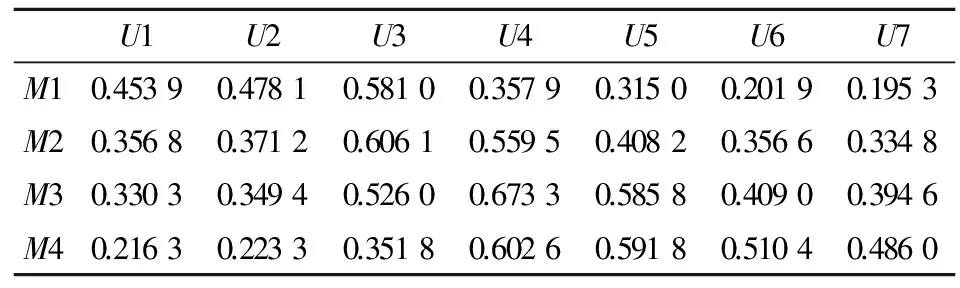
表1 UCAV综合制导优势
按照本文的粒子群算法求解得到制导权移交策略为:M2交由U3制导,M3和M4均交由U6制导。其中交接前后的制导关系如表2所示,粒子群算法的适应度值η随迭代次数变化的曲线如图5所示,η即为式(13)中的总体制导优势值,J为迭代次数。

表2 交接前后制导关系对比
由图5可以看出最优适应度值很快收敛,结合表1中数据可知,该制导权移交策略符合总体制导优势最大化的原则,是全局最优解。
最后给出各架UCAV分别对M2,M3和M4的综合制导优势值S2,S3和S4随时间变化的曲线,如图6~图8所示。
根据图6~图8中UCAV对待交接导弹的制导优势变化曲线,可以看出本文综合制导优势建模的准确性以及制导权移交策略的合理性。
5 结束语
本文结合当前UCAV的性能特点,提出了一种适合UCAV对空作战的超视距协同空战模式。针对其中制导交接问题,分别分析了UCAV对导弹和对目标的态势优势,据此建立了综合制导优势模型。并采用粒子群算法对所设计的制导权移交策略进行了优化求解,实现了制导权在多UCAV内部的合理交接。在一定程度上提高了UCAV的生存能力和自主决策能力,保证了对敌方的有效攻击,具有较好的理论意义及军事应用前景。
[1] 黄长强,翁兴伟,王勇,等.多无人机协同作战技术[M].北京:国防工业出版社,2012:1-7. HUANG Chang-qiang,WENG Xing-wei,WANG Yong,et al.Cooperative combat technology for multi-UAVs[M].Beijing:National Defense Industry Press,2012:1-7.(in Chinese)
[2] 朱自强,王晓璐,陈泽民,等.无人驾驶飞行器的气动特点和设计[J].航空学报,2006,27(2):161-174. ZHU Zi-qiang,WANG Xiao-lu,CHEN Ze-min,et al.Aerodynamic characteristics of unmanned aerial vehicles and its shape design[J].Acta Aeronautica Et Astronautica Sinica,2006,27(2):161-174.(in Chinese)
[3] 陈哨东,孙隆和.先进无人战斗机(UCAV)系统概念[J].火力与指挥控制,2003,28(6):10-13. CHEN Shao-dong,SUN Long-he.The concept of advanced UCAV system[J].Fire Control & Command Control,2003,28(6):10-13.(in Chinese)
[4] 朱华勇,张庆杰,沈林成.提高无人作战飞机协同作战能力的关键技术[J].控制工程,2010(S1):52-55. ZHU Hua-yong,ZHANG Qing-jie,SHEN Lin-cheng.Technologies for promoting cooperatively combat capability of UCAV[J].Control Engineering of China,2010(S1):52-55.(in Chinese)
[5] 李宏智.战术数据链的发展与作战应用[J].舰船电子工程,2010,30(4):1-5. LI Hong-zhi.Development and operational application of tactical data links[J].Ship Electronic Engineering,2010,30(4):1-5.(in Chinese)
[6] 高坚,佟明安.双机编队协同制导的火控机理[J].火力与指挥控制,2009,34(12):38-40. GAO Jian,TONG Ming-an.Fire control principle on cooperative guidance with two-fighters team[J].Fire Control & Command Control,2009,34(12):38-40.(in Chinese).
[7] 肖冰松,方洋旺,胡诗国,等.多机空战协同制导决策方法[J].系统工程与电子技术,2009,31(3):610-612. XIAO Bing-song,FANG Yang-wang,HU Shi-guo,et al.Decision methods for cooperative guidance in multi-aircraft air warfare[J].Systems Engineering and Electronics,2009,31(3):610-612.(in Chinese)
[8] SHAFERMAN V,SHIMA T.Cooperative multiple model adaptive guidance for an aircraft defending missile[J].Journal of Guidance Control and Dynamics,2010,33(6):1 801-1 813.
[9] PIET-LAHANIER H,KAHN A,MARZAT J.Cooperative guidance laws for maneuvering target interceptions[J].Automatic Control in Aerospace,2013,19(1):301-306.
[10] SHIN H S.Study on cooperative missile guidance for area air defence[D].England:Cranfield University,2010.
[11] 张明德.认识真实的空空导弹(三)[J].航空档案,2007(8):34-47. ZHANG Ming-de.The real air to air missile[J].Aviation Archives,2007(8):34-47.(in Chinese)
[12] 冉华明,周锐,吴江,等.超视距空战中多机协同制导方法[J].北京航空航天大学学报,2014,40(10):1 457-1 462. RAN Hua-ming,ZHOU Rui,WU Jiang,et al.Cooperative guidance of multi aircraft in beyond-visual-range air combat[J].Journal of Beijing University of Aeronautics and Astronautics,2014,40(10):1 457-1 462.(in Chinese)
[13] 费爱国,张陆游,刘刚,等.基于粒子群拍卖混合算法的空空导弹制导权移交技术[J].宇航学报,2013,34(3):340-346. FEI Ai-guo,ZHANG Lu-you,LIU Gang,et al.The technique for air-to-air missile guidance superiority handover based on particle swarm auction hybrid algorithm[J].Journal of Astronautics,2013,34(3):342-346.(in Chinese)
[14] 刁兴华,方洋旺,张磊,等.中远程空空导弹多机协同中制导交接方法[J].国防科技大学学报,2014,36(3):77-82. DIAO Xing-hua,FANG Yang-wang,ZHANG Lei,et al.Method of guidance handover in midcourse guidance phase of air-to-air missile about cooperative multi-platform[J].Journal of National University of Defense Technology,2014,36(3):77-82.(in Chinese)
[15] 刁兴华,方洋旺,王鹏,等.对地攻击协同制导决策方法[J].电光与控制,2011,18(3):52-55. DIAO Xing-hua,FANG Yang-wang,WANG Peng,et al.Cooperative guidance decision-making in air-to-ground attacking[J].Electronics Optics & Control,2011,18(3):52-53.(in Chinese)
[16] 吴文海,周思羽,高丽,等.基于导弹攻击区的超视距空战态势评估改进[J].系统工程与电子技术,2011,33(12):2 679-2 685. WU Wen-hai,ZHOU Si-yu,GAO Li,et al.Improvements of situation assessment for beyond-viual-range air combat based on missle launching envelope analysis[J].Systems Engineering and Electronics,2011,33(12):2 679-2 685.(in Chinese)
[17] 肖冰松,方洋旺,胡诗国,等.一种新的超视距空战威胁评估方法[J].系统工程与电子技术,2009,31(9):2 163-2 166. XIAO Bing-song,FANG Yang-wang,HU Shi-guo,et al.New threat assessment method in beyond-the-horizon range air combat[J].Systems Engineering and Electronics,2009,31(9):2 163-2 166.(in Chinese)
[18] 蓝伟华,林南粤.单机对单机交战几何态势分析[J].电光与控制,2004,11(4):14-16. LAN Wei-hua,LIN Nan-yue.Geometric situation analysis for one aircraft to one aircraft engagement in air combat[J].Electronics Optics & Control,2004,11(4):14-16.(in Chinese)
[19] 沈艳,郭兵,古天祥.粒子群优化算法及其与遗传算法的比较[J].电子科技大学学报,2005,34(5):696-699. SHEN Yan,GUO Bing,GU Tian-xiang.Particle swarm optimization algorithm and comparison with genetic algorithm[J].Journal of Electronic Science and Technology,2005,34(5):696-699.(in Chinese)
[20] KENNEY J,EBERHART R C.Particle swarm optimization[C]//IEEE International Conference on Neural Networks.USA:IEEE,1995:1 942-1 948.
[21] 钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2000:102-108. QIAN Xing-fang,LIN Rui-xiong,ZHAO Ya-nan.Missile flight aerodynamics[M].Beijing:Beijing Institute of Technology Press,2000:102-108.(in Chinese)
Method of Guidance Handover in Beyond-visual-range Coordinated Air-combat for Multi-UCAVs
ZHOU De-yun,YANG Zhen,ZHANG Kun
(School of Electronics and Information,Northwestern Polytechnical University,Xi’an 710129,China)
UCAV has superior mobility and stealth performance while the stability of communication system and intelligence level are poor at present.According to these features,a beyond-visual-range coordinated air-combat mode for multi-UCAVs was proposed.To investigate the handover of guidance power from intermediate-range air-to-air missiles to other friendly UCAVs,a method of guidance handover was proposed.The process of guidance handover was analyzed in principle.Then the situational superiority models of UCAVs to the missile whose guidance power needed to be turned over and the target of missile were established.Based on these models,the comprehensive guidance superiority model of UCAVs was constructed.The strategy of guidance handover was designed according to this model,and solved by particle-swarm optimization algorithm.The reasonable handover of guidance power among multi-UCAVs was realized,and the survivability and autonomous decision-making capacity of UCAV were improved to some extent.The simulation result verifies the feasibility and validity of the method.
multi-UCAVs cooperation;air-to-air missile;beyond-visual-range air combat;guidance handover
2016-06-05
国家自然科学基金项目(61401363);航空科学基金项目(20155153034)
周德云(1964- ),男,教授,博士生导师,研究方向为先进航空火力控制。E-mail:nwpuyz@foxmail.com。
杨振(1993- ),男,博士研究生,研究方向为复杂系统建模与仿真。E-mail:1533422060@qq.com。
V448.1
A
1004-499X(2017)02-0001-07