北斗地基导航信号网络测试方法研究
2017-07-05符京杨汤廷松
符京杨,王 力,汤廷松,赵 娜,周 锋
北斗地基导航信号网络测试方法研究
符京杨1,2,王 力1,汤廷松2,赵 娜2,周 锋2
(1.信息工程大学 导航与空天目标工程学院,河南 郑州 450001;2.北京卫星导航中心,北京 100094)
为尝试解决北斗卫星导航系统在特定区域因信号受遮挡而无法定位或定位精度较差的问题,引入了以伪卫星为基础构成的北斗地基导航信号网络。介绍了北斗地基导航信号网络的系统组成和关键技术,提出了一套测试评估其定位和授时效能的方法,并给出了测试评估的指标建议作为参考,为地基伪卫星增强北斗卫星导航系统的应用及推广提供了相应的评价工具。
北斗卫星导航系统;信号网络;伪卫星;测试评估

目前在山坳、矿井和高楼林立等区域,世界上的GNSS系统(GPS、GLONASS、GALILEO等)都面临着由于卫星信号受到遮挡而影响定位精度甚至无法完成定位的问题[1]。我国自行研制的北斗卫星导航系统(BDS)也不例外。除此之外,由于BDS目前特有的GEO+IGSO+MEO混合星座构型[2]以及卫星信号精度、钟差、地面基站相对较少等原因,其服务区内有许多区域的定位精度较差甚至无法定位。目前学术界和工程界主要采用多GNSS系统组合[3-5]来克服这个问题,但该方法无法在未来可能存在的涉及国家安全的领域(如军事、银行、电网等)中应用。
引入伪卫星[6]技术,结合BDS的独特性,以伪卫星为基础建立北斗地基导航信号网络,可以对解决上述问题进行有效尝试。但北斗地基导航信号网络的应用效能如何,可否在相关区域补充增强或替代BDS,是需要用定量指标来鉴定的。因此,本文研究后拟提出一种伪卫星增强北斗系统的测试评估方法,尝试为未来开展此类研究及进一步推广北斗系统的应用提供一个相应的工具。
1 北斗地基导航信号网络
1.1 系统组成
北斗地基导航信号网络是以伪卫星技术为核心的北斗地基增强系统,其体系结构包括构成要素和参与要素。构成要素由伪卫星、伪卫星监测站、北斗地基导航增强型定位终端、伪卫星网络管理中心和时间同步系统组成;参与要素由北斗导航卫星和地面运控系统组成。网络的体系结构覆盖频谱、测量、通信、网络、安全性、设备6类体系,其直观描述如图1所示。
北斗地基导航信号网络采用闭环设计思想。伪卫星监测站负责对其所覆盖区域内的所有伪卫星进行监测,将完好性和伪卫星间时差信息通过伪卫星控制数据网(光纤数据通道)传递给伪卫星网络管理中心,在伪卫星网络管理中心完成时间同步解算,并将完好性和时间同步信息通过伪卫星控制数据网反馈给各伪卫星,从而构成一个闭环系统。其中伪卫星控制数据网的物理实现载体是光纤,构建方式可通过租用电信 数据通信通道专线实现。其系统结构如图2所示。

图1 北斗地基导航信号网络的体系架构
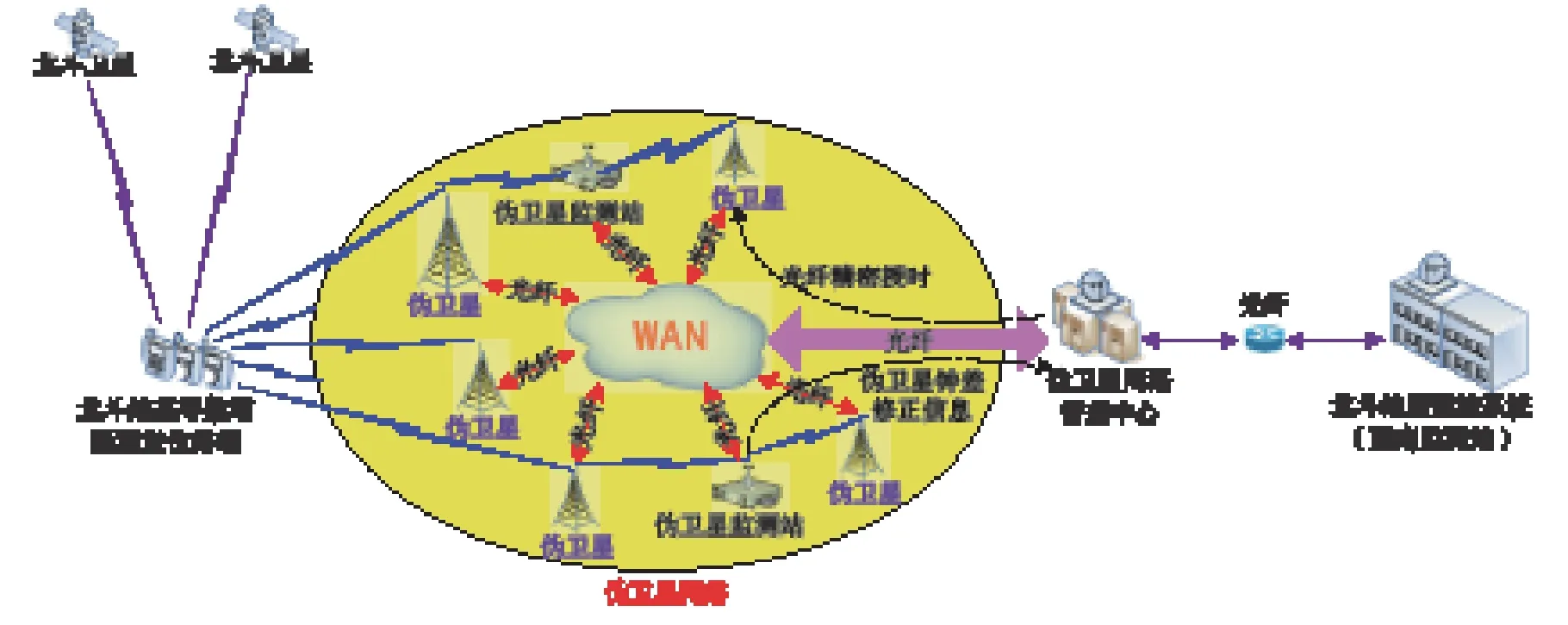
图2 北斗地基导航信号网络的系统结构
1.2 关键技术
用地基伪卫星建立北斗地基导航信号网络,相比导航卫星而言,已具备了三大优势:①地基伪卫星安装位置固定,其星历比移动的导航卫星更易处理;②地基伪卫星间距离比导航卫星近,可通过有线方式实现更高精度的星间时间同步;③伪卫星在地球表面,信号传播过程中不经过电离层,误差比导航卫星小。但是,要保证其自身优势的充分发挥,必须解决3项关键技术难题,具体内容如表1所示,其中时间同步技术的内容和指标来源于参考文献[7]。
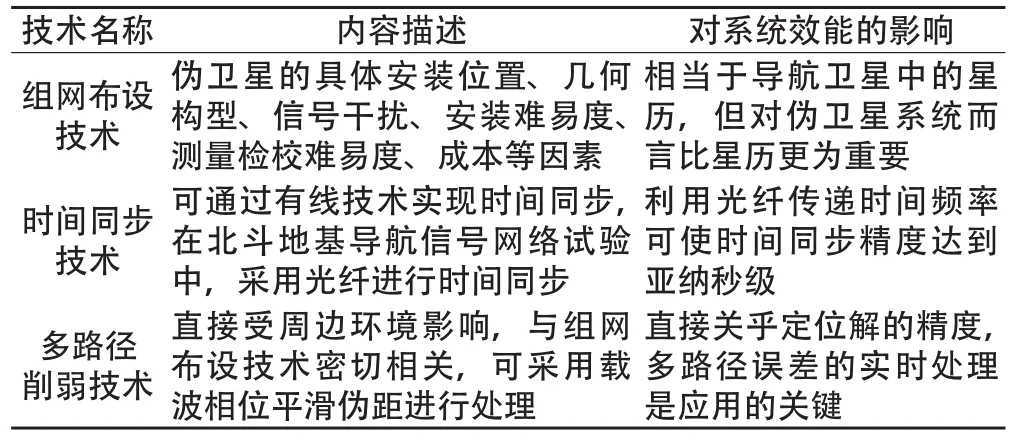
表1 北斗地基导航信号网络的关键技术
2 测试评估方法研究
2.1 静态测试评估方法
通常对于卫星导航系统的静态测试评估主要包括定位精度和授时精度测试。因此,本文也选择静态定位精度和静态授时精度来评估北斗地基导航信号网络对BDS的辅助和增强效果。
2.1.1 静态定位精度
增强型定位终端可以在北斗卫星/伪卫星协同工作和伪卫星独立工作两种模式下工作。将终端天线置于已经过传统测绘方式精确标定的已知点上构成基准站,进行48 h连续数据采集,采集频度为1次/30 s。利用接收的各颗伪卫星的伪距观测数据和伪卫星导航电文信息进行终端定位解算,并与高精度已知点位置进行比较,测试增强型定位终端的静态定位精度。测试原理如图3所示。
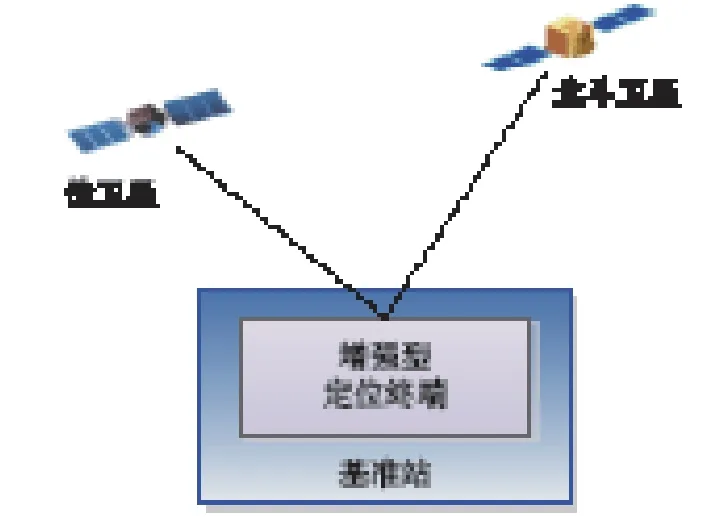
图3 静态定位精度测试示意图
要对采集的测试数据进行记录分析和处理,评估静态定位精度的计算公式为:
式中,(dX,dY,dZ)为静态定位精度的实时值;(Xu,Yu,Zu)为接收机定位的空间三维直角坐标;(Xk,Yk,Zk)为基准站的空间三维直角坐标。式中,dE、 dN、dU、dH分别为东方向误差、北方向误差、天顶方向误差以及水平位置误差。
分别按北斗卫星/伪卫星协同定位模式和伪卫星独立定位模式对整个观测时段的定位终端定位精度进行统计,给出定位精度及其可用度的统计结果。定位终端定位精度按99%置信度进行统计,基本方法是将待评估数据中所有历元的定位误差从小到大排序,取99%分位点处定位结果的误差值作为99%置信度精度。定位终端定位精度可用度统计方法是满足相应精度的历元记为可用,否则记为不可用。
参考国外针对伪卫星增强GPS系统的相关研究数据[8-9]和BDS内部测试数据,建议伪卫星和北斗卫星协同定位模式下的评估标准为水平精度优于1 m、高程精度优于1 m;根据国外进行的GPS系统类似实验[10]结果,建议伪卫星独立定位模式下的评估标准为水平精度优于3 m。
2.1.2 静态授时精度
在基准站放置1台增强型定位终端,进行连续1 h数据采集,采集频度为1次/s。终端接收北斗卫星和伪卫星信号并进行定时解算;将终端的1 pps、运管系统输出的1 pps两路信号接入时间间隔计数器,测量二者间时差,计算北斗地基导航增强系统地面用户授时精度。
对整个观测时段两路1 pps信号的时差值进行处理,给出北斗地基导航增强系统授时精度及其可用度的统计结果。授时精度按99%置信度进行统计,基本方法是将待评估数据中所有历元的时差值从小到大排序,取99%分位点处时差值作为99%置信度精度。授时精度的可用度统计方法是满足相应精度的历元记为可用,否则记为不可用。以BDS正常工作状态下的授时精度为参考,建议北斗地基导航信号网络的授时精度测试评估标准为优于3 ns。
2.2 动态测试评估方法
动态测试评估主要针对用户的定位精度进行。用户的动态定位精度测试依托地面移动载体(主要是汽车等)完成(图4),实验方法和具体步骤为:
1)选择一个已知精确坐标的伪卫星站点安置一 台差分型GPS接收机作为基准站,在汽车上固定安装一 台与基准站配套的差分GPS接收机和一台支持北斗和伪卫星的增强型定位终端。
2)根据选定的路线,连续进行测试;动态测试的采样频度为1次/s,基准站、移动载体分别记录GPS载波相位、伪距等原始观测数据,移动载体记录增强型定位终端按照设定时间间隔得到的定位时刻、终端位置、卫星信号状况和GDOP等信息。时间归算和坐标归算后,将增强型定位终端定位结果与GPS接收机单点定位结果进行实时初步比对测试;利用基准站及移动载体GPS测量数据进行高精度计算(PPP和相对定位解算),并将定位结果与经时间归算后的增强型定位终端定位结果进行精确比对测试。
3)以每条路线为单位,统计定位精度等,形成测试结果报表。

图4 动态定位精度测试示意图
在数据的记录与处理方面,动态测试定位结果比对的数据为高精度GPS精密定位结果和增强型定位终端定位结果,以证明该方法的相对可用性。
式中,dP为平面位置差,下标分别表示差分GPS定位结果和北斗/伪卫星协同定位结果,单位为m。平面定位精度统计和高程定位精度统计的计算公式分别为:

式中,N为参加统计的观测次数。允许操作人员输入的最大限差值为σP,Hmax和σP,Vmax,在统计计算中排除超过最大限差值的数据,累计出现次数,并记录该数据。所输入的限差值不得小于系统预估定位精度的5倍。另外,当出现GPS受干扰不能进行正常工作、GPS不能进行正常差分工作或GPS差分结果按PDOP估计精度不满足所设计的差分GPS精度指标等情况时,不记入定位精度统计。
以通过相关理论[11]计算后的计算值为参考,建议将动态定位性能指标设计为:伪卫星和北斗卫星协同定位模式下,水平精度优于2 m、高程精度优于2 m。
3 结 语
本文所述的测试评估方法可以有效地对北斗地基导航信号网络辅助增强北斗系统的能力进行评估,通过该方法测试得出的结果可以在对系统测试改造升级过程中起到标尺作用。在未来的研究中,对多路径误差的进一步处理和伪卫星的天线相位中心标定会成为提升该方法精度的新增长点。当基于北斗地基导航信号网络的用户定位结果及系统可靠性接近BDS的独立定位水平时,将会为BDS无法正常服务时提供一种可靠的应急的手段。
[1] WANG J P, GAO J X,LIU C,et al. High Precision Slope Deformation Monitoring Model Based on the GPS/Pseudolites Technology in Open-pit Mine[J]. International Journal of Mining Science and Technology,2010,20(1):126-131
[2] 王胜利,王庆,杨徉,等.北斗IGSO/GEO/MEO卫星联合
高精度定位方法[J].中国惯性技术学报,2013(6):792-796
[3] 臧楠.BDS/GNSS精密单点定位算法研究[D].西安:长安大学,2015
[4] 李墩泰.GPS/BD-2组合定位技术研究[D].哈尔滨:哈尔滨工程大学,2013
[5] 徐君毅, 杨元喜, 李金龙,等.COMPASS与其他GNSS组合导航完好性分析[J].中国科学:地球科学,2013(10):1 632-1 642 [6] 刘超,高井祥,于子晏,等.GPS/伪卫星相对定位中伪卫星优化布设模型研究[J].中国矿业大学学报,2012(1):120-126 [7] CHEN X,ZHANG J ,LU J L, et al. Feed-forward Digital Phase Compensation for Long-distance Precise Frequency Dissemination Via Fiber Network[J]. Optics Letters,2015,40(3):371-374
[8] WANG J,Tsujii T,Rizos C, et al. GPS and Pseudo-satellites Integration for Precise Positioning[J].Geomatics Research Australasia,2001,74:103-117
[9] Choudhury M,Rizos C.Slow Structural Deformation Monitoring Using Locata:a Trial at Tumut Pond Dam[J]. Journal of Applied Geodesy,2010(4):177
[10] JANG J, Ahn W G, Seo S, et al. Flight Test Result for the Ground-based Radio Navigation System Sensor with an Unmanned Air Vehicle[J]. Sensors,2015,15(11):28 472-28 489
[11] 周巍.北斗卫星导航系统精密定位理论方法研究与实现[D].郑州:信息工程大学,2013
P228.4
B
1672-4623(2017)05-0016-03
10.3969/j.issn.1672-4623.2017.0050.5
符京杨,博士研究生,研究方向为卫星导航地基增强技术。
2016-11-03。
项目来源:国家高技术研究发展计划资助项目(2013AA122403);国家自然科学基金资助项目(41274014、41501491)。
