智能化无人艇发展关键技术
2017-07-04苏艳琴海军航空大学
苏艳琴(海军航空大学)
通过分析国内外关于无人艇的研究现状及其在军事和民用方面的需求,对智能化海面无人艇关键技术展开分析,未来将人工智能技术应用于无人艇的研究将极具应用价值和实践意义。
随着无人化作战的优势日益突出,陆海空天一体化无人作战体系必将对未来作战样式和形式产生深刻影响。为了更好地应付来自海上的作战威胁,同时随着国家“一带一路”大战略海上丝绸之路建设,大力开展智能化无人艇研究非常必要和迫切。
智能化海上无人系统是具备一定智能水平的、可以借助遥控或自主模式连续接触水面运行的、完成一项或多项任务的海上无人系统。一般来说,无人系统包括空中、地面和水面水下无人系统。涉及海洋空间的无人系统包括水面无人艇(USV)与水下无人潜航器(UUV),无人艇是依靠近乎连续接触水面运行的海上无人系统,包括常规船体舰船、水翼舰船和半潜式舰船。无人水下潜航器的运行不必与水面接触(但可能出于通信目的需要接近水面浮标进行通信),有些可以秘密航行。这里仅对海面上具备一定智能水平的无人系统,重点对能实现智能自主航行的海面无人艇的军用和民用发展需求及未来发展关键技术进行介绍,在此基础上,对基于载荷的运用和基于任务的协同用途进行分析。
国内外发展现状
早在二战时期,美军利用装有枪炮和导弹的无人艇实现远程攻击任务,在越南战争中曾用无人艇来扫雷;可以说,无人艇发展长期以来一直受到美国海军的关注。近些年,随着通信和计算机技术的飞速发展,传感器和任务载荷能力提升,呈现模块化、互操作、多任务、自主性等趋势。2007年,美国海军海上系统司令部制定《海军USV总体规划》提出,无人艇需要具备高度自动化水平,以减少远程通信的需求和操作人员的负担。该计划对USV的军事任务做了如下概括∶(1)扫雷;(2)反潜作战;(3)海事安全;(4)水面战争;(5)支持特种作战;(6)电子战争;(7)海事特别任务。
美国和以色列两国凭借其在整个无人系统领域强大的技术优势,在无人艇方面走在世界前列。较为出名的无人艇型号有美国的“斯巴达侦察兵”(Sapartan Scout)以及以色列的“保护者”(Protector)等,除此之外,英国、德国、法国、日本等国家也己经开始了水面无人艇的研究并取得了一定的成果,表1给出国外几种典型无人艇的性能参数。
国内对于无人艇的研究起步较国外晚,但近些年发展迅速,且已从最初的概念设计阶段逐渐过渡到实际运用阶段。哈尔滨工程大学、大连海事大学等院校和中国船舶重工集团公司、中国电子科技集团、国家海洋局第一海洋研究所等机构,以及海兰信、云洲、沈阳新光集团等公司都对无人艇展开了一定程度的研究,主要工作围绕平台展开,包括无人艇平台总体技术建模与仿真、无人艇自主控制、传感器网络构建及实现、任务模块设计与开发、任务规划与决策以及协同等领域。

表1 国外几种典型无人艇性能参数表
无人艇发展需求分析
民用需求
随着人类认识海洋的步伐逐步加快,信息、网络和人工智能技术不断发展,USV可用于执行民用的海洋数据收集、海洋环境保护、航运、航道测量、搜救和救援等任务。
其中,欧美等国家和日本利用无人艇采集海洋环境数据,这样技术已较为成熟,大大节约了人力和物料费用。我国内河航运在国家运输业中发挥的作用日渐明显,航道作为航运三大基本要素之一,航道数据是航运管理的重要依据,也是构建“智能航道”的必要条件。航道数据主要包括河床数据、航道尺寸、航道演变、水文数据、水位、航标及其他助航设施布设情况等。并且,受潮汐、气候因素的影响,航道数据变化频繁,需及时更新。我国内河航道中的部分河段较窄、船舶交通量大、桥梁多,船舶事故时有发生。船舶事故发生后,越早发现危害越小,生命财产保全的可能性也越大。同时,内河沿线多为人口集中区,事故如没有得到及时地处理,会对沿线的居民生活带来危害。目前,相关海事部门采用人员定期巡航,巡航时间和次数有限,且在夜间和大风浪天气下巡航较少。在当前技术条件下将USV应用于内河巡航已成为可能。
军用需求
以任务需求为牵引,美国和以色列研究和发展无人船/艇的脚步一直走在世界前列,并制定了一系列研究计划,其他欧美等国家和日本也相继发展各自的无人船/艇计划。归纳起来,无人船/艇的军事任务需求归纳为:
(1)沿海智能巡逻、情报收集、监视和侦察(ISR),这是主要任务需求,包括使用各个级别的运载工具,在人员和潜艇无法进入的区域,进行情报收集、监视和侦察;
(2)扫雷,主要是部署能够发现和摧毁敌军水雷的无人作战系统;
(3)反潜,不仅能发现和跟踪敌方潜艇,并对其发起攻击,还能安全潜入敌方潜艇基地,对其发动毁灭性攻击;
(4)水面作战,包括运送特种部队所需的装备,或在某一水域散播自动监视器等;
(5)反恐,主要是防范可能从海上发起的恐怖袭击;
(6)通信导航网络节点,是指作为未来陆海空天一体化作战体系中,海面无人化战争中全球通信体系的一个节点或一部分;
(7)电子战,是指利用海面无人系统实施干扰敌军通信网络,包括通信对抗、雷达对抗等,或作为诱饵,即遥控靶船,实施干扰和混淆敌方侦察情报的目的;
(8)远程火力攻击,搭载各类导弹或炸弹甚至包括核弹头,对敌方实施火力打击。

智能化无人艇关键技术
近几年来,人工智能(Artificial Intelligence)在多个领域得到应用。在海面智能无人系统方面,由于艇上无人,从对海洋环境的智能感知,到地面站对其智能指挥控制等方面都需要利用人工智能技术。
基于智能通信网络的信息链技术
无人艇与母船或者地面站之间需要通过数据链路进行信息交互,以目前测控通信技术的“四合一”通信体制来看,有两条频道,即地面指控站向无人艇发送遥控指令、无人艇回传遥测和载荷获取视频图像等信息。实现功能包括遥控、遥测、视频图像信息和跟踪测距等,而且需要满足一定的信息传输协议和标准,需要考虑频率资源、相邻频段干扰的问题,尤其在超视距情况下,还需要考虑卫星带宽资源、租用费用、军事卫星保密、抗干扰和实时性等问题。
在实现互联互通互操作以及通用化的基础上,为一站多艇的控制技术实现提供可能。一站多艇,即一个母船或地面站控制多艘、甚至多型无人艇的技术。一般地,一站多机可以采用时分多址(TDMA)、频分多址(FDMA)、码分多址(CDMA)的形式等。

(上)智能化海面无人艇组成示意图。
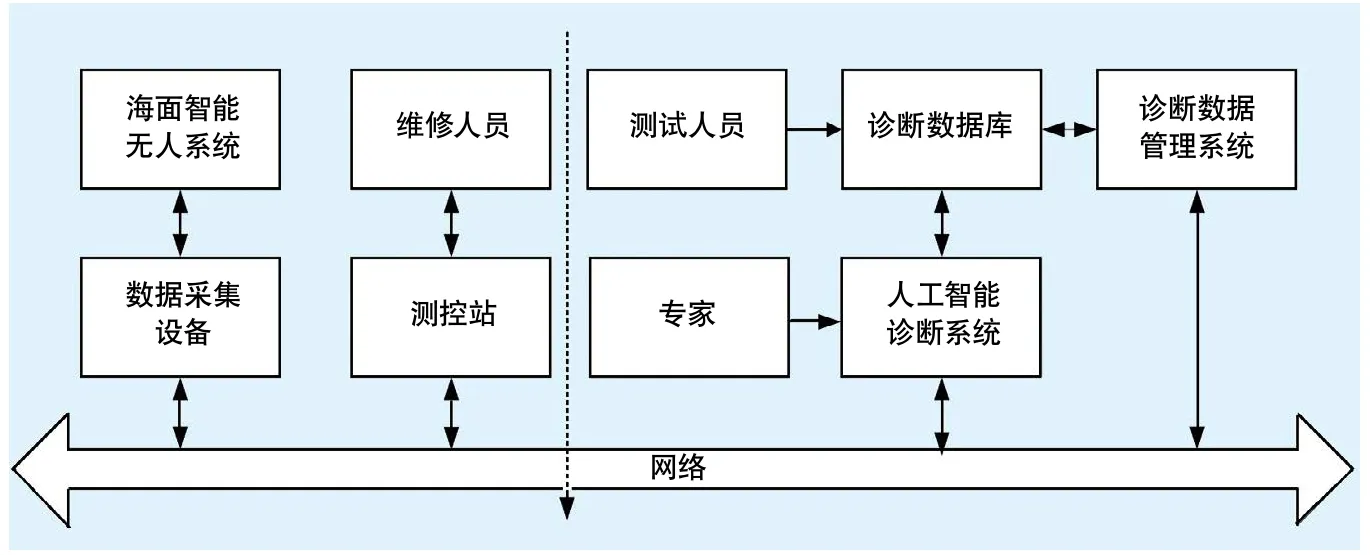
(下)海面智能无人系统智能诊断系统示意图。
基于传感器网络的智能感知技术
在未知环境中,无人系统必须解决各种复杂环境的感知与理解任务。复杂气象、复杂电磁、复杂威胁条件以及复杂地形决定了环境感知任务的艰巨性,对现有环境感知理论提出了重大挑战,多平台多传感器信息融合感知已成为重要发展方向,因此,智能感知是海面无人情况下的核心技术,几乎涉及所有海面无人系统电子信息系统,具有标准化、模块化、可裁剪、可重配置、开放式体系架构、系列化发展、综合效费比高的特点,根据使命任务的不同,可装备于港口型、可搭载型、远洋长航时型等多种海面无人系统。
模块化的任务载荷技术
海面无人系统总是面对特定任务而存在,不同应用背景,单独还是集群任务不同,对任务载荷要求都不同,据此开发模块化、通用化的任务载荷系统是趋势。另外,由于海面无人系统载重有限,因此,其上的载荷设备需要轻量型,低功耗等等。从智能化海面无人艇组成示意图可以看出任务载荷在整个海面智能无人系统中的作用。
基于信息融合算法的智能诊断技术
故障诊断是一门涉及现代信息技术、控制科学、与模式识别、电子技术、人工智能学、统计数学等学科的综合性较强的学科分支。无人艇故障可以划分为机械设备故障和电子设备故障,无人艇为被测对象。
智能诊断过程步骤:(1)利用各类传感器和数据采集通道获取无人艇的信息,并通过网络把数据传送给诊断服务器;(2)服务器运行智能诊断与数据融合算法,得出诊断结果;(3)诊断结束存放故障信息;(4)数据库管理;(5)诊断结果通知维修人员,维修人员维修反馈结果。智能诊断算法是整个系统的核心,无人艇故障的多样性决定了故障诊断的复杂性和诊断方法的多样性,通常情况下,单一故障诊断技术很难做到面面俱到,将多种智能故障诊断技术的融合,取长补短,能更有效更全面地诊断故障。
智能化多艇协同技术
目前己知的水面无人艇类别繁多,艇型复杂,承担的任务多种多样,电子系统架构简单,规格标准各不统一,这么多种类的无人艇的地面指挥控制系统仅能在本厂家和型号以内实现通用,跨厂家、跨型号之间还未能实现对其指挥控制的通用化和互操作,互连互通性差导致工作效能较低,生产维护成本高,不具备高水平的协同协作能力,不符合未来水面无人艇网络化多域协同作战的发展趋势,与未来一体化作战中,无人系统编队间、无人艇与其它作战力量间、无人艇跨区域间协同作战的需要存在巨大矛盾。因此,急需研究一种信息获取能力强、自主化水平高、任务处理能力强,支持能力扩展,支持多种作战样式,支持互联互通互操作,支持多种类型水面无人艇,统一架构的新型水面无人艇载电子信息系统。
面对某一特定海上任务,无人艇可与航母、有人舰艇/船、空中有人/无人机、地面有人/无人车辆及武器系统等协同完成。这牵扯到目标分配的任务分工、自主行为决策的协同控制、协同通信资源分配和复用等。
结束语
随着人工智能技术日益受到追捧,无人艇近来研究的热度也不断提升,将先进的人工智能算法应用于无人艇研究中,获得更好的效能是未来研究的重要方向。 ■
