基于控制系统状态观测器设计的算法分析
2017-07-03高燕,赵娜
高 燕,赵 娜
(1.郑州师范学院,河南 郑州 450000;2.信阳职业技术学院,河南 信阳 464000)
基于控制系统状态观测器设计的算法分析
高 燕1,赵 娜2
(1.郑州师范学院,河南 郑州 450000;2.信阳职业技术学院,河南 信阳 464000)
研究时滞系统状态观测器设计的计算方法。在信息技术不断发展中需要满足对预测控制输入的定量控制,通过对整体观测器的设计控制,可更好地满足对观测器实际使用状态上的执行调控,从最基础的检测设计完成对整体预测观测器的环境预测。针对预测控制器的实际使用性能进行综合分析,判断在不同环境下的执行调控,并以此来确定在不同计算公式环境下的优化设计。
控制系统;状态观测器;优化设计
0 引 言
伴随着近年来信息技术的不断发展,在应用技术的使用上,随着不断的技术推动,在进行装填空间模型的建设中,通过代表性的控制体系技术执行建设,其中模型预测控制技术的出现在很大程度上可更好地满足基本的预测监控建设。而在进行模型精度宽容性分析上,可以更好地满足对基本的建设需求。本文从现代空间模型设计项目的系统维持状态进行综合分析,并探究在不断的研究过程中对整体的操控处理,以及控制向量的设计分析,通过合理的设计建设,为后续的发展提供兼顾处理体系。下面针对其时滞系统的状态观测器设计算法进行简要分析研究。
1 预测控制系统的设计
在进行状态空间数字模型的描写建设中,对于不同的时滞系统状态描述处理控制,可通过线性定向控制系统,完成对整体的系统动态向量分析,并通过合理的状态向量实现对整体维数系数在执行操作系统上的自动衡量能力的判定和矩阵的稳定系统分析,为后续的具体操作提供安全信息保障[1]。对于精度的精密性信息分析,也能够通过系统的整体影响系统分析,通过对系统在性能上的忽略,更加便利地完成对整体系统的检测分析[2-3]。在进行这一理论数值的计算中,具体的向量计算公式如下:
X(t)=Ax(t)+Bu(t-r),y(t)=Cx(t)
(1)
在(1)式中,x∈Rn,y∈Rp,u∈Rq,经分析,其各项系数的维持,主要通过对维数的常规使用,实现对矩形观测信息的全面控制分析。
对于整体的观测数据设计分析,可从以下几点进行简要分析。
1.1 降维状态的预测观测器设计方式
针对满秩序矩阵C在使用上会受到常量矩阵D的可逆执行,因此在执行中,需要从以下的式子来进行干预分析处理:
(2)
在(2)式中,其中T1∈Rnp,T2∈Rn(n-p),而A1∈Rp2,A12∈Rp(np),A21∈Rp(n-p),A2∈R(n-p)(n-p),式(2)构成了整个预算观测器在运行过程中的等价代理信息计算运行,通过整体的结构变化等价调整,为后续的观测检测提供保障。而对于整体系统等价预测检测功能,则可通过式(3)来实现:
(3)
在(3)式中,对于整个系统的数据输入等,都可根据实际的构造变化来完成对文本结构的预测降维系统调整,并以此来完成对整体观测系统的使用计算。
1.2 预测矫正模型的设计分析
在进行相应的仿效系统的设计过程中,由于需要满足对预测处理系统的执行选择,在进行相应额的木星设计中,就需要注意如下2个式子中的数据计算规律:
X(t+r)=Ax(t+r)+Bu(t)
(4)
Y(t+r)=Cx(t+r)+F(y(t)-Cx(t))
(5)
(4)式、(5)式中,其中F为diag{f1……fq}的矫正矩阵,在进行调节过程中可通过输入预测的信息调整确保预测信息的精确度。
1.3 最优化反馈控制规律分析
对于最优化控制目的选择,通过有效的规律控制,基于基本的控制规律以及使用的优良性指标等,可通过下式来进行:
(6)
在取极小值时,可对其进行Q=CTHC,其中H∈Rp2。
对于整体的结构数据分析也可结合实际的反馈装置,实现对整体理论上的系统预测分析。其实际的控制规律,如式(7)所示:
U(t)=-R-1BTPγ(t+r)
(7)
P表示在矩阵方程中的唯一正解。为满足基本模块在设计完毕的操作应用,也可结合实际的系统流程,在完成对整体的模块设计后进行多方面的执行操作,实现对不同的流程结构进行综合性分析[4]。
2 系统性能结构分析
对于频率分析的执行操作,可借用相应的频域初始条件进行适当的调节分析。这个过程中,为满足基本的使用调整,可通过式(8)来进行。
Y(s)=C(sI-A)-1Be-rsU(s)
(8)
其中所检测出来的预测观测数值,对于整体的运算执行等,能更好地满足对信息的预测数据变化检测。对于综合信息的信息判定问题,通过基本的闭环数据进行计算,也可更好地保证对反馈规律的执行操作调整。进行计算操作如下式:
U(s)=R-1BTP(Xs(s)-L(x(t+r)))
(9)
在(9)式中,为满足对不同预算信息的闭环检测,需要结合图1所示的流程环节来进行最终的数据分析。
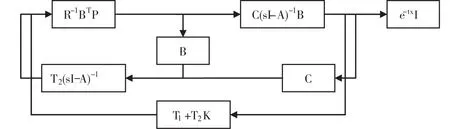
图1 闭环控制系统的等效原理
在进行时域分析的过程中,为方便对数值的取值分析,可结合实际的预测误差进行综合调整,并依照相应的误差数值报表,完成整体的状态观测,以此来实现对误差方程模型的综合性误差调整,并实现对整体状态的观测分析。基本的观测误差方程如下:
xoe(t+r)Axoc(t+r)+Cype(t+r)
(10)
对于基本的设施误差判断,可结合实际的使用观测需求理念,完成对整体的配置任意渠道分析,并通过相应的信息数据分析,实现对整体的观测精度分析,并以此来完成对预测误差的ype信息计算[5]。
在实际的使用操作上,可结合相应的计算指标,实现对预测误差的信息结构处理,并通过变化的缓慢信息调整,从最根本的基础信息运算上,实现对整体的误差预测信息数据执行。
在进行信息的定义计算过程中,为满足对稳定矩阵的信息计算执行,需要进行对稳定矩阵的全面检测。通过观测数据的测定分析,进一步实现对观测预测信息的时滞系统进行综合性分析,并实现对整体运行基础的层次解析,为后续的结构建设提供安全保障[6-7]。
对于实际的操作执行,为实现对方程的定量信息分析,需要从以下几个点的信息进行综合判定,并通过合理的信息调节,完成对不同方程的综合信息调整分析。其使用的优化方程如下:
(11)
(11)式中,不同的数据分析调整流程可从不同的体系关系来进行综合分析,并通过整理,实现对整体系统的指标性信息计算,完成整体的优化控制。
3 结 论
在进行控制对象的预测数据分析中,向量和系统的控制数据之间存在着降维状态,而在这个过程中,设计预测观测器的使用,成为降低其状态分布作用的重点。在这个过程中,通过对整体的系统优化反馈控制,即可实现对研究性数据的综合调整,通过实际的预测评估理念,完成对不同状态的结构观测分析,并依照相应的信息计算,实现对整体性能在预测观测信息上的全面监控,为后续的性能检测提供优质保障。
[1]李娟,叶若红,唐功友,等.含控制时滞系统的实时故障诊断和最优容错控制[J].控制与决策,2008,23(04):439-444.
[2]付艳明,张鹏,段广仁,等.一类线性时滞系统的状态观测器设计[J].黑龙江大学学报(自然科学版)2005,22(01):16-20.
[3]张城明.时滞系统的最优跟踪控制与状态观测器设计[D].青岛:中国海洋大学,2008.
[4]宿浩.时滞系统的控制方法及应用研究[D].青岛:中国海洋大学,2015.
[5]周兰.基于连续—离散二维模型的周期系数线性系统鲁棒重复控制设计[D].长沙:中南大学,2010.
[6]樊铭渠.时滞及非线性系统最优输出跟踪控制研究[D].青岛:中国海洋大学,2008.
[7]MICHIELSW,ROOSED.Time-delaycompensationinunstableplantsusingdelayedstatefeedback[C]//Proceedingsofthe40thIEEEconferenceonDecisionandControl.Orlando:IEEE,2001,2:1433-1437.
[责任编辑:毛微曦 英文编辑:刘彦哲]
Analysis of State Observer Design Algorithm Based on Time Delay System
GAO Yan1,ZHAO Na2
(1.Zhengzhou Normal University,Zhengzhou,Henan 450000,China; 2.Xinyang Vocational and Technical College,Xinyang,Henan 464000,China)
The calculation method of state observer design based on time delay system was studied.To meet the need of predictive control input quantity in continuous progress of information technology,controlling the design of the overall scheme better met the actual use of the amount of state observer executive regulation.From the detection of the most basic design,the environment prediction of overall predictive observer was completed.In this paper,the actual performance of the predictive controller is analyzed comprehesively,the implementation control in different environment was judged.Based on this system,the optimal design in the different environments of the formula was determined.
control system;state observer;optimization design.
高燕(1983-),女,河南洛阳人,助教,硕士,研究方向:概率统计。
F 721.7
A
10.3969/j.issn.1673-1492.2017.05.006
来稿日期:2016-09-19
