山羊坡地行走的步态分析
2017-06-30张伏王唯张国英王俊邱兆美
张伏+王唯++张国英++王俊++邱兆美++毛鹏军


摘要:为研究山羊坡地的行走状态和运动规律,以36°坡地为例,采用高速摄像系统记录了山羊36°坡地的上坡行走过程,并将运动序列存储至计算机中,利用SigmaScan软件和Matlab软件对存入计算机的试验影像结果进行处理分析,得出山羊36°坡地上的运动步态特性参数和坡地运动过程中各腿腿部的角度变化曲线。结果表明,在36°坡面的上坡过程中,山羊采用的步态为静步态和对角小跑步态;在上坡过程中,山羊各腿的负荷因数为0.645±0.205,即腿处于支撑相的时间远大于处于移动相的时间,说明山羊各腿的支撑相大于移动相,这种特点可增加山羊运动的稳定性,为仿山羊农业机械坡地行走机构的设计提供基础试验数据,能够促进四足行走机构关键技术的发展和应用领域的扩展。
关键词:农业工程;仿生;山羊;高速摄像;坡地;步态
中图分类号: S126文献标志码: A文章编号:1002-1302(2017)08-0196-03
行走步态作为自然界动物最常使用的1种生物特征,是研究步行式行走机构的基础[1-3]。目前,随着行走机构研究的深入,单足、2足、3足、4足、6足、8足甚至更多足数的步行式行走机构均已出现,其中以4足步行行走机构的研究最为广泛。近年来,研究地面各类4足行走动物的行走状态和运动规律有很多,但国内外对山羊这种4足哺乳动物的研究较少。山羊躯体较小,四肢骨骼坚实有力,它的支撑足离散地接触地面,可自主选择最佳落足点。其运动轨迹是一系列孤立的点,具有主动隔振能力,能以较高速度在凸凹不平和松软地面上运动,能耗较小,可远距离行走;其运动步态敏捷轻快,能在地面、坡地、陡壁和山区等凸凹不平的地表上自由灵活地进行跨越运动,受环境限制较小。山羊可作为行走机构研究的基础,为研究适应复杂环境的农业机械行走机构提供新思路[4-10]。本研究引入高速摄像技术对山羊36°坡地运动状态进行了拍摄,并应用SigmaScan软件和Matlab软件对所拍摄图像进行了分析。
1材料与方法
1.1试验方法本试验采用高速摄像仪(最高可达10 000帧/s)拍摄山羊在坡地的行走过程。试验过程中,由人牵引山羊,确保它在坡地上始终以直线状态行走,以减小拍摄误差,避免处理图像数据困难。固定摄像机于三脚架上,设置镜头于山羊前进运动的正侧面,并对摄像机的空间位置、取景范围、拍摄距离、光圈和焦距等硬件条件进行调整,保证镜头主光轴对准山羊运动范围的中心,尽可能地靠近山羊运动平面,使得山羊能够清晰成像。调整高速摄像仪,确保拍摄速度与不同坡地的山羊运动相适应,记录下山羊在36°坡地的运动序列图像并储存至计算机中,然后利用SigmaScan图像软件采集分析山羊躯体关键点的数据,得出山羊在不同坡地运动中的对应系列特征参数及曲线。
1.2试验对象
山羊属于偶蹄目,主要有头、颈、躯干和四肢组成。头部坚实,颈部与躯体、前肢良好结合,胸宽且深,肋骨张开,背腰宽厚平直,后躯宽长丰满,四肢强健,结构匀称,高度适中。试验对1头母山羊(1.5年)进行了分析,其主要体态特征列见表1。试验地点为河南省洛阳市郊区山坡,气温为32~35 ℃。
1.3試验设备
试验所用的仪器设备分为3类:第1类测试设备,包括高速摄像仪(FASTCAM-Super 10K,用于拍摄山羊运动过程)、倾角仪、机械磅秤(XSJ 2×1300W-2O,用于山羊称质量)等;第2类照明设备,包括新闻灯(MODEL10000,用于摄像辅助光源);第3类数据处理设备,包括微型计算机、笔记本电脑和打印机等。
1.4试验数据处理方法
从试验拍摄的图像中抽选出具有完整步态周期的序列图像,利用SigmaScan图像软件处理图像数据[6-8],并将测得的山羊四肢关键点的相对坐标值和对应关节处的角度值保存为Excel文件格式,然后将Excel数据导入Matlab软件对数据进行处理,最终得到山羊运动特征数据与曲线图[9-10]。
2结果与分析
2.1山羊步态周期分析
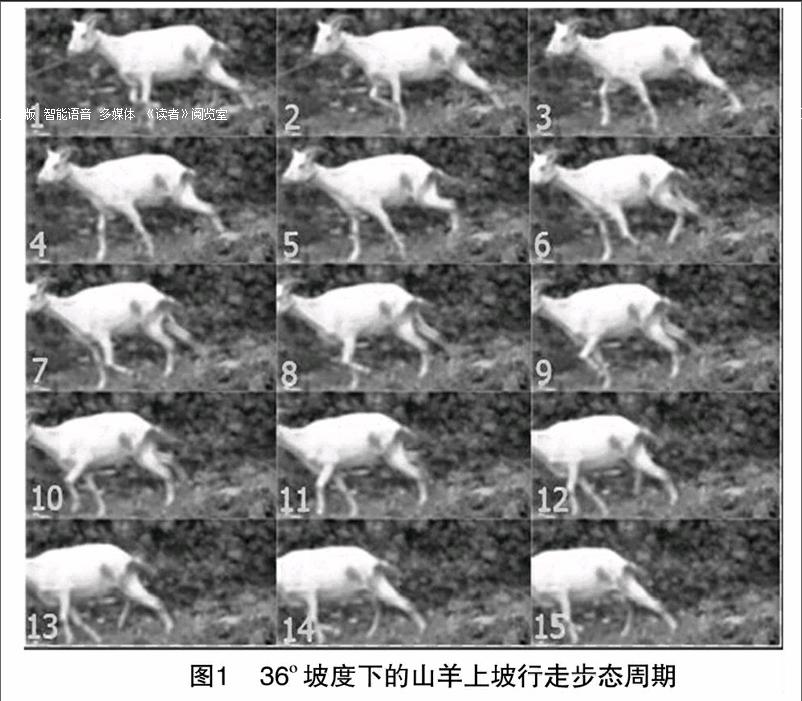
以每2幅图片之间的时间间隔70 ms(即8帧)来选取1个完整的山羊步态周期图(图1)。其中,山羊在此坡度上完成1个完整的步态周期需要花费440 ms(共44帧)。试验中观察到的山羊的行走步态为静步态和对角小跑步态的交替运行。
1个完整的步态周期内,山羊在36°坡地上行走对应的行走速度为71.1 cm/s,行走步距127.5 cm。1个完整的步态行走周期内,山羊在36°坡地上行走所对应的单腿跨距、单腿步距、负荷因数见表2。
由表2可知,在上坡过程中,山羊各腿的负荷因数为0645±0.205,即腿处于支撑相的时间远大于处于移动相的时间。说明总体上山羊各腿处于支撑相时需要较多的时间来稳定重心,当各腿处于移动相时,在空中处于摆动状态的各腿可产生惯性力矩,移动相时间较短可减少惯性力矩对身体的影响,加快与支撑相腿交换频率,从而增加身体的稳定性。
由图2可知,山羊在36°坡地上向上行走过程中,走完1个步态变换周期共经历了4次3腿共同支撑时期。右前腿悬空时,其他3条腿处于支撑状态,此过程经历了480 ms;身体逐渐前移,右前腿迈步准备着地时,左后腿离地(即两腿处于短暂的悬空状态),左前腿与右后腿仍处于支撑状态时(对角小跑步态),此过程经历了80 ms;随后左后腿悬空,其他3条腿处于支撑状态,此过程经历了200 ms;随之左前腿悬空,其他3条腿处于支撑状态,此过程经历了180 ms;身体逐渐前倾,重心前移,左前腿迈步准备着地时,右后腿离地(即两腿处于短暂的悬空状态),右前腿与左后腿仍处于支撑状态时(对角小跑步态),此过程经历了120 ms;之后,右后腿悬空时,其他3条腿处于支撑状态,此过程经历了320 ms;接着右前腿悬空时,其他3条腿处于支撑状态,此过程经历了 480 ms。至此山羊完成了1个完整的步态变换周期。随着1个步态周期的完成后,山羊的身体接着前移,右前腿迈步准备着地时,左后腿离地(即2条腿处于短暂的悬空状态),左前腿与右后腿仍处于支撑状态时(对角小跑步态),此过程经历了60 ms;随后左后腿悬空,其他3条腿处于支撑状态,此过程经历了280 ms。如此反复,形成了山羊的稳步行走[11-14]。
1个完整的步态周期内,山羊的各条腿支撑时期占整个步态运动周期的比例见表3。
通过上述研究发现,山羊在36°坡地上的上坡运动中总共经历3腿共同支撑时期4次;对角小跑步态2次;对角小跑所占用的悬空时间远小于3腿支撑所占用的悬空时间;随着山羊从坡底到坡顶过程中,对角小跑所占用的悬空时间越来
越小。本试验条件下可认为山羊在36°坡地的上坡运动过程中主要为3腿共同支撑和对角小跑状态。
2.2山羊腿部角度分析
测得山羊36°坡地上坡各腿的腿部角度变化范围值见表4。
对山羊行走的1个步态周期的试验数据进行处理,得到山羊坡地行走时4条腿腿部角度变化曲线(图3)。其中,α角均表示为山羊在行走過程中大腿和小腿之间的夹角,即腕关节角度,β角均表示为山羊在行走过程中大腿与前进方向的夹角,即大腿与水平前进方向的夹角[11]。
山羊36°坡地上坡行走过程中各腿的腿部角度变化结果如下。左前肢:左前肢在后屈离地抬起到前伸迈步着地的过程中,β角的曲线随着α角曲线的增大而增大、减小而减小;当α角处于峰值和低谷时,β角的值也处于对应的峰值和低谷处,说明在迈步运动过程中比较平稳。左后肢:左后肢在前屈离地抬起到前伸迈步着地的过程中,当α角处于最大值时,β角处于最小值;当α角第1次处于低谷时,β角为最大值。右前肢:右前肢在后屈离地抬起到前伸迈步着地的过程中,β角的曲线基本随着α角曲线的变化而变化,说明运动比较平稳。右后肢:右后肢在前屈离地抬起到前伸迈步着地的过程中,α角较β角变化平稳,当α角第1次出现峰值时,β角出现第1次的低谷现象;当α角第3次出现峰值时,β角出现再次的低谷现象;β角出现最大值时,α角处于平缓状态;此后,当α角处于最大值时,β角处于低谷。
3结论
对山羊坡地行走试验过程和试验方法进行了研究,重点分析了图像处理软件SigmaScan在高速摄像中的应用方法,并对山羊身上的关键点进行了运动学数据采集和归类,获得了较完整的运动学数据参数,为步态分析提供了研究基础。
利用SigmaScan软件处理分析了存入计算机的实验序列图像,得出山羊36°坡地上的运动步态特性参数和坡地运动过程中各腿腿部的角度变化曲线及规律性,为仿山羊坡地行走机构的设计提供了基础试验数据。
在本试验条件下可认为山羊在36°坡地的上坡运动过程中主要为3腿共同支撑和对角小跑状态。
分析表明,山羊各腿的负荷因数为0.645±0.205,即腿处于支撑相的时间远大于处于移动相的时间,说明山羊各腿的支撑相大于移动相,这种特点可增加山羊运动的稳定性。
参考文献:
[1]张伏,张国英,毛鹏军. 山羊躯体结构与影响步态运动因素的研究[J]. 农机化研究,2012,34(1):51-54.
[2]王建明,赵彦,朱彦防,等. 基于ADMAS与MATLAB的四足机器人的trot步态联合仿真[J]. 机床与液压,2015(3):57-59.
[3]Autumn K,Hsieh S,Dudek D,et al. Dynamics of geckos running vertically[J]. The Journal of Experimental Biology,2006,209(Pt 2):260-272.
[4]孙祥一,胡建,王鲲鹏,等. 高速摄像三维图像分析技术与应用[J]. 宇航计测技术,2010,30(6):30-34,44.
[5]李杰. 大型六足仿生平台机器人机构设计及运动仿真[J]. 机械工程师,2014(10):178-180.
[6]贾蕴琪,曹致中,王赟文,等. 基于数字影像处理技术的结缕草秋
季枯黄动态分析研究[J]. 草业学报,2009,18(3):94-102.
[7]王立东,王良意,杨海涛,等. SigmaScan Pro 5软件在脊柱影像测量分析中的应用[J]. 中国医师进修杂志,2007,30(增刊1):90-91.
[8]刘冠初,熊静琪,乔林,等. 四足机器人自由步态规划建模与算法实现[J]. 西安交通大学学报,2015,49(6):84-89,144.
[9]Pa P S. Design of a modular assembly of four-footed robots with multiple functions[J]. Robotics and Computer-Integrated Manufacturing,2009,25(4/5):804-809.
[10]江励,管贻生,蔡传武,等. 仿生攀爬机器人的步态分析[J]. 机械工程学报,2010,46(15):17-22.
[11]肖世旭. 大壁虎的三维步态实验及分析[D]. 南京:南京航空航天大学,2006.
[12]王洪波,徐桂玲,胡星,等. 四足并联腿步行机器人动力学[J]. 机械工程学报,2012,48(23):76-82.
[13]谭小群,李军,赵国斌,等. 一种重心调整装置在四足机器人步行中的应用[J]. 中国制造业信息化,2008,37(23):25-28.
[14]谢惠祥,罗自荣,尚建忠.四足机器人对角小跑动态控制[J]. 国防科技大学学报,2014(4):146-151.