机载控制系统的CAN总线设计与应用
2017-06-27武晓玥
武晓玥
(中国电子科技集团公司,电子信息控制重点实验室,成都 610036)
机载控制系统的CAN总线设计与应用
武晓玥
(中国电子科技集团公司,电子信息控制重点实验室,成都 610036)
通过CAN总线在目前主要机载项目中的应用设计,从系统设计、拓扑设计、连接器选用、软件设计等多个维度对CAN总线在机载设备的应用完成了设计并验证。实验表明,本研究实现的机载CAN总线控制系统具有低时延、安全可靠、扩展性强,能够进行远程系统升级维护等优点,系统能够较好地适用于新一代机载电子系统的控制系统。
CAN总线;机载控制;远程加载
引 言
随着CAN总线相关技术的日趋成熟,以及车载平台与机载平台在某些方面的相似性,其在航空领域的应用逐渐得到重视,近年来国外的主要飞机制造商已经开始把CAN总线应用到飞机上,使飞机产品在性能改进的同时具有更高的经济性。目前机载专用飞机系统采用离线数据线方式,线束多,重量大,可靠性、容错性、开放性越来越难以满足目前机载装备的要求,而且在机载专用飞机领域的应用目前尚未大规模普及,应用过程中的问题逐步暴露。通过CAN总线在目前某机载项目中的应用设计,本文从系统设计、拓扑设计、连接器选用、软件设计等多个维度对CAN总线在机载设备的应用进行设计并验证,实验表明,本研究实现的机载CAN总线控制系统具有时延低、安全可靠、扩展性强等优点。
1 系统总体设计
1.1 系统拓扑构成
机载控制系统CAN总线网络可以分为系统级、分系统、分机级网络。设计采用一组差分信号线将所有节点连接成直线型网络,网络中所有节点应通过支线连接到干线网络中,系统级拓扑为系统主干节点,鉴于机载产品装备对于CAN总线控制存在一些特殊的需求,如通信距离、设备数量、可靠性等,在综合考虑各种因素后,在系统级CAN网络规划方案中采用如图1所示的拓扑互联方式。
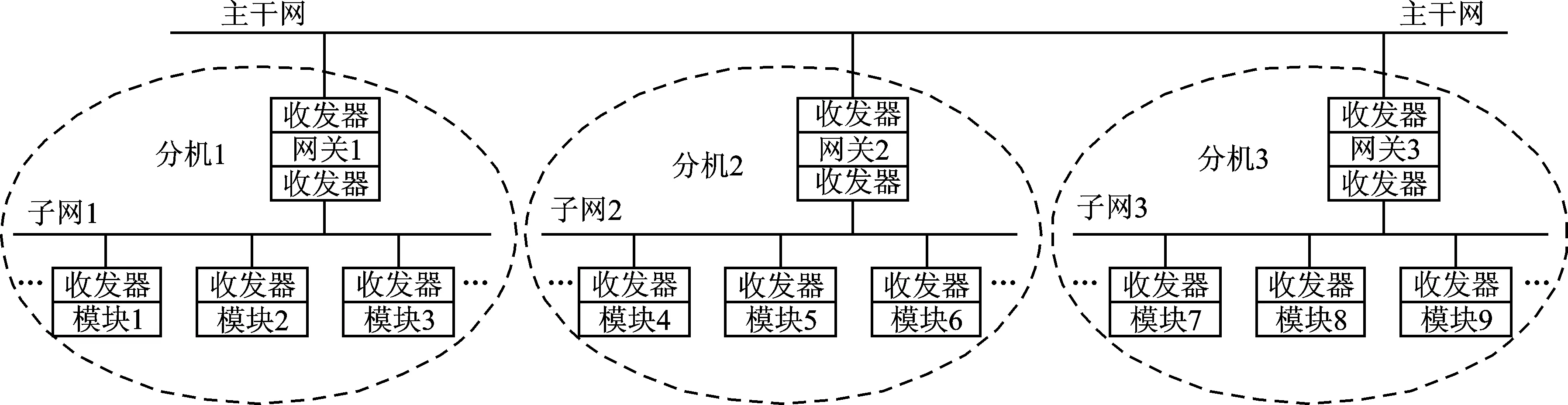
图1 基于子网级联的CAN拓扑扩展
在分系统内部或者分机内部采用基本CAN总线拓扑形式,如图2所示。在CAN节点内部,每个节点由控制器、隔离器、收发器及外围电路构成。对于应用于机载用途的CAN节点,采用双路冗余的CAN总线设计,保证每路CAN端口同时连接在两个独立的CAN网络中。
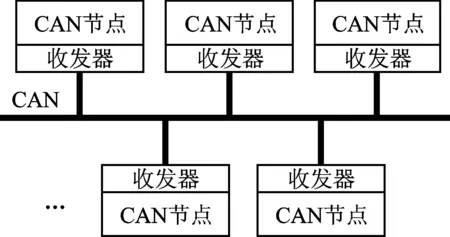
图2 基本CAN系统总线网络
在实际应用中,由于受到传输距离和传输带宽的限制,往往需要将完整的CAN网络拆分成若干个子网,子网间采用网桥或网关相互连接,从而实现传输距离和传输带宽的扩展。
1.2 供电设计
本机载电子系统CAN总线被定位成通用控制及健康管理总线。由于CAN总线需要用于全系统的健康管理,其供电可靠性要求应该高于系统内的功能模块。因此,CAN总线网络需独立于功能模块单独供电。CAN网络系统的供电方案遵照以下两种方式:集中式供电和分布式供电。
集中式供电由系统电源提供一路独立的CAN电源,由电源干线分别连接到网络中各个节点,如图3(a)所示。集中供电方案中的电源干线不宜过长,干线的单位阻抗需严格控制,必须保证干线远端的电压差不超过0.1 V。这种供电方案适用于分机内部各模块间的CAN电源供电。

图3 集中式与分布式供电方案
分布式供电由节点内部的电源模块为CAN单元提供独立的二次电源,如图3(b)所示。这种供电方案需要在每个节点内部设计一个二次电源模块,并注意考虑每个二次电源的输出功率,相邻两节点间的距离可以适当增加。这种方案通常适用于分机间的CAN电源供电。
在CAN节点内部,由于控制器与收发器之间存在隔离器件,为实现隔离器两端的隔离效果,必须考虑隔离器两端的供电设计。根据CAN节点外部提供的电源数量,节点供电可以分为以下两种方式:
① 为保证隔离器两端信号的隔离效果,隔离器两端的器件应采取电气隔离,通常选用DC-DC变换器实现电源隔离,如图4所示。
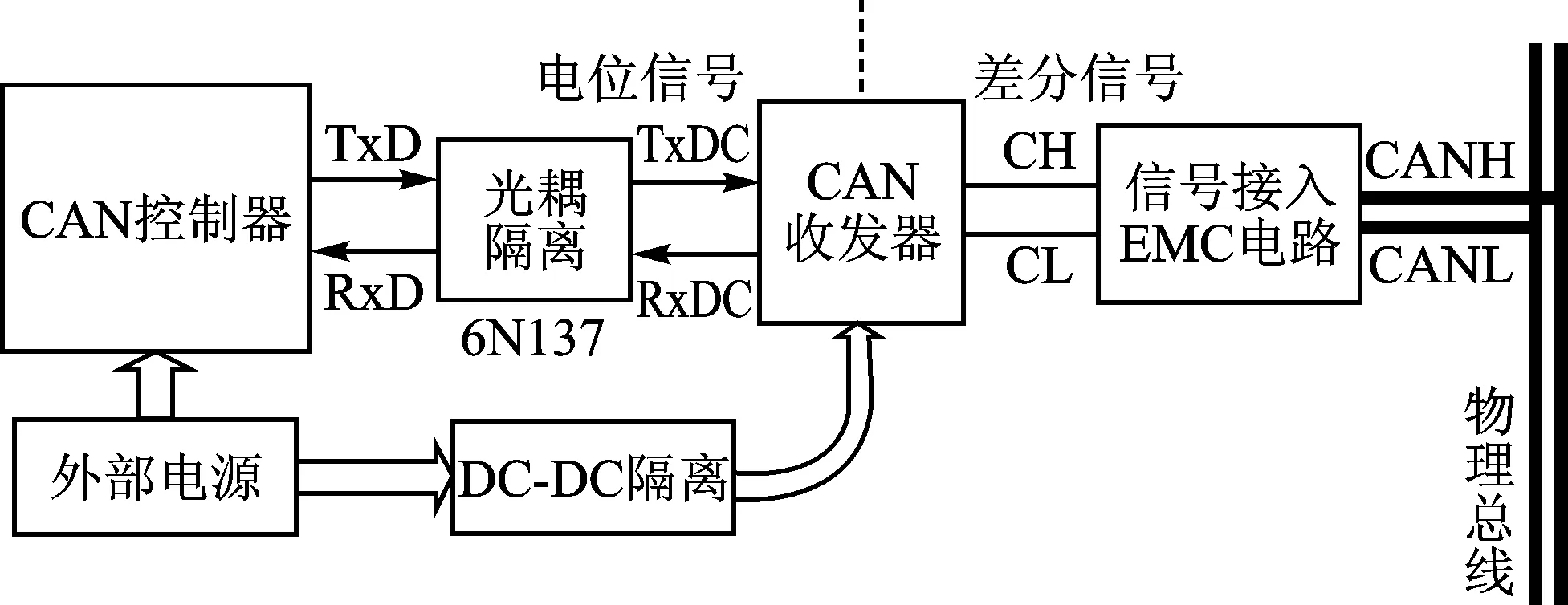
图4 CAN电路单电源供电示意图
② 若电源模块能够直接为CAN节点提供两路隔离电源,则节点内部可以省略DC-DC隔离,分别使用外部提供的两路电源直接为隔离器两端供电。
1.3 信号完整性设计
在多个CAN节点通过干线连接成网络时,应在干线的两个末端安装终端电阻,用于抑制总线信号反射,这类终端电阻被称为干线终端电阻。如果某控制器模块通过一段比较长的支线接入网络,为了防止信号反射,在收发器驱动能力足够的前提下,可以在该控制器模块内部安装分裂式终端电阻,这类终端电阻称为支线终端电阻。在同一网段中,采用支线终端电阻的节点不允许超过4个。表1列举了终端电阻的具体使用要求。

表1 端接电阻推荐值 单位:Ω
终端电阻的安装可以采用以下几种方式:
① 直接安装在干线末端,终端电阻必须采用独立电阻(不允许采用分裂式终端电阻),且应该根据网络干线实际的负载状况选择与之匹配的电阻阻值。
② 安装在节点收发器接口电路处,如果采用这种安装方式,则终端电阻应采用分裂式电阻。
③ 为了减小驻波,各个节点模块距离干线的长度不宜相同,同时应该避免节点模块在总线上等间隔分布,任何两个节点模块之间的间距最好不要相等。
1.4 接口设计
CAN总线接口的标准参考电路如图5所示。

图5 CAN接口参考电路
在CAN接口电路设计时,遵循以下设计原则:①当超过4个CAN节点通过干线连接成网络时,必须去掉各节点的分裂终端电阻R1、R2,但可以保留其原有焊盘;②共模电感L及保护电路Z1、Z2用于接口电路的过压过流保护,在节点间电磁环境较为稳定的前提下,可以酌情省略该部分电路;③当CAN总线电缆不采用屏蔽双绞线时,可以省略屏蔽层滤波电路R3及C5。
1.5 节点互连
背板互连通过背板子系统的印刷电路层实现多个载板之间的电气连接。在这种互连方式中,背板子系统的印刷电路作为CAN的信号干线,各个载板通过连接器实现CAN节点到网络干线的信号接入。这种互联方式通常应用于分机内的CAN网络电气互联,在设计时应遵循以下设计原则:
① 背板差分对的标称特性阻抗在1 MHz的方波条件下应为120 Ω,阻抗精度应控制在±10%以内;
② 载板连接器到板内收发器之间的铜线长度不超过50 mm,传输介质阻抗不超过2 Ω;
③ 干线终端匹配电阻应安放在背板干线末端,不建议用末端载板的支线终端电阻代替干线终端电阻;
④ 若CAN总线上需要接入总线监视设备,应从背板干线中心附近位置接入。
线缆互连多用于分机间的CAN网络电气互连,设计时按照以下原则执行:①总线电缆应采用屏蔽或非屏蔽双绞线,推荐使用非屏蔽双绞线,若使用环境中EMC性能未达到要求,可以使用屏蔽双绞线;②如果采用屏蔽双绞线,应在干线上的某一点将屏蔽层用导线直接接地,且该点应该是所受干扰最小,同时位于网络中心附近的位置;③当分机接入CAN总线时,必须在干线的输入插座和输出插座处使用硬线将干线连通,且所用硬线的芯线尺寸应与干线芯线的尺寸一致。
2 系统应用设计
2.1 驱动器
CAN驱动芯片驱动能力需要满足信号差分摆幅大于等于1.3 V,波形方正。其中有些驱动能力不够,驱动波形如图6所示,会导致接收端识别CAN信号出现重同步错误和电平判别错误的现象,从而导致CAN发生反复重传,外在故障现象为CAN总线反应迟钝,严重时出现掉线现象。
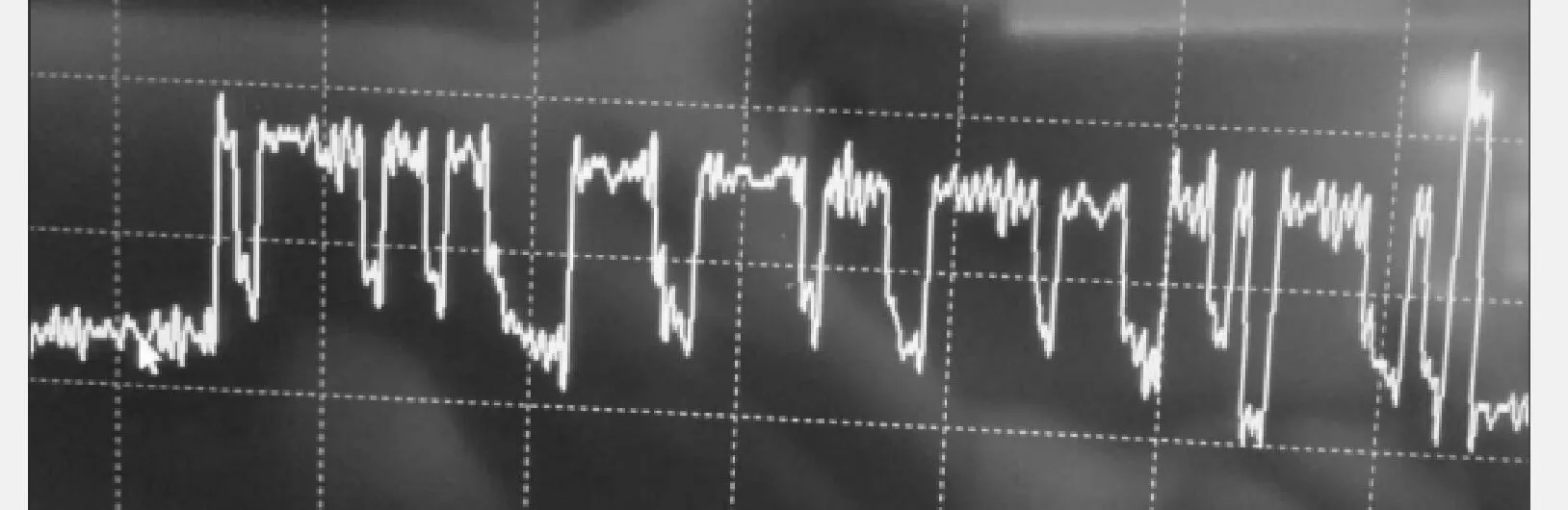
图6 模块测试波形(给出误码率)
2.2 CAN总线与端接
CANOPEN规定,CAN总线必须符合ISO11898-2标准,该标准规定:典型导线阻抗120 Ω、导线单位长度电阻≤70 mΩ/m、信号延迟≤5 ns/m。
在使用中,有CAN链路不稳时将端接电阻120 Ω调小的现象。端接电阻调小会带来两个弊端:信号摆幅变弱和信号反射。最终导致CAN链路问题反复发生。CANOPEN推荐端接方法如表2所列。
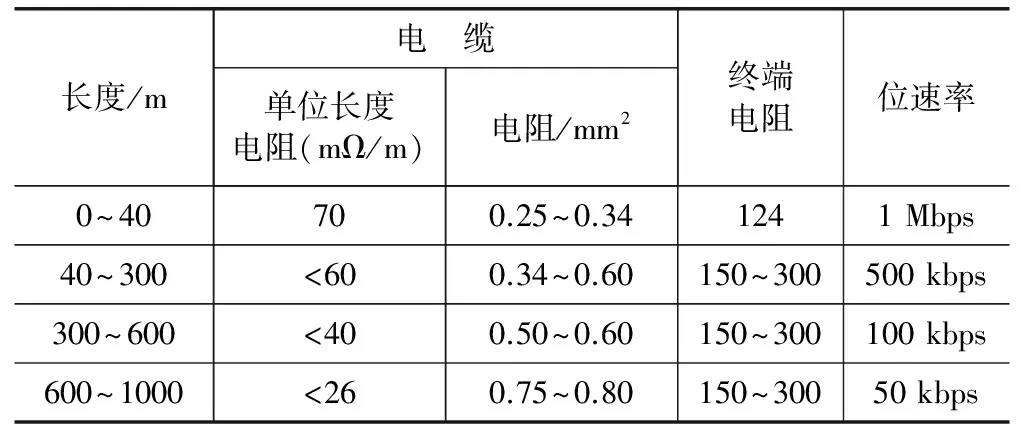
表2 CAN配线
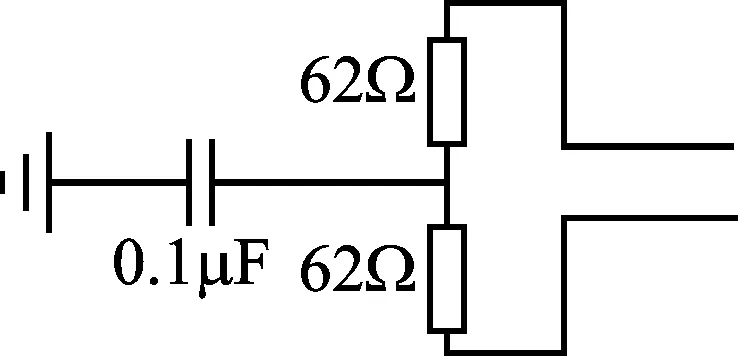
图7 “Y”端接
在电缆长度≥40 m后,线损相对反射是链路稳定的主要因素,应当加大端接电阻。分机间CAN总线连接时,地线如没有连接时,各分机地之间经常存在随机压差,在CAN总线上体现为共模干扰。在该情况下,端接电阻需要由单个120 Ω更改为两个62 Ω电阻加电容的“Y”型端接,如图7所示,电容用作吸收共模干扰信号。
对于母板总线,前期设计CAN差分只考虑120特征阻抗,没有考虑到单位长度电阻,布线过细,导致信号插损较大。CANOPEN要求母板走线W≥12 mil。
2.3 连接器及电缆
建议选用满足CAN总线阻抗匹配的连接器及电缆用于总线传输及转接。
2.4 软件配置
CAN通信提供了重同步和应答响应/重传机制。由于CAN应答使用BIT位的方式,所以重同步控制和长度匹配特别关键。
在CAN通信中,每1位分为图8所示的4个时间段。CAN使用过采样技术对CAN总线信号进行采样,同步段用于确定位的起始位置。重同步功能仅限于从隐性到显性的转换时刻,该时刻波形被驱动器控制,较为陡峭方正,抖动稳定,用作同步最为理想。相位段2必须保留两个过采样时间基本点以上,防止重同步跳出BIT位。
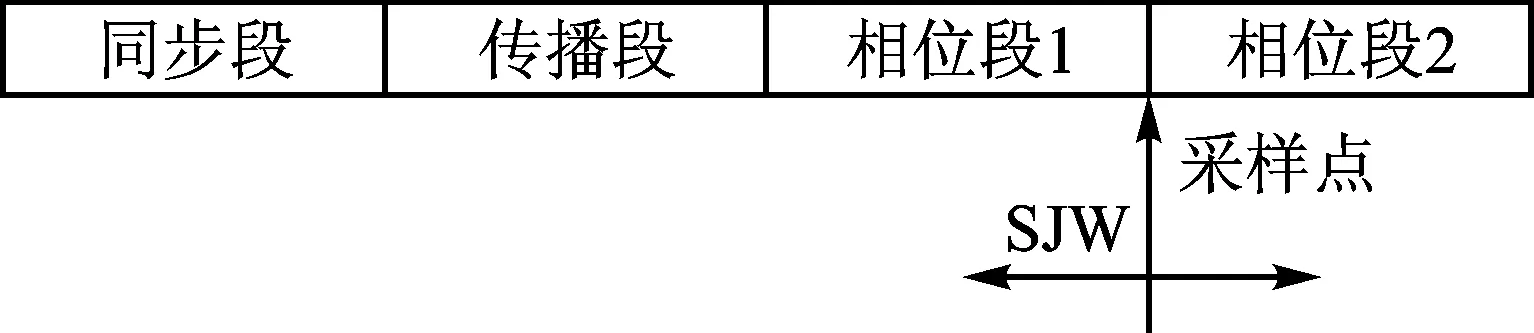
图8 CAN通信BIT位构成
机载CAN在1 Mbps传输速率时, CIA(CANOPEN 国际组织)规定采样点推荐值为87.5%。因此将采样点配置至87.5%,可有效提高CAN工作距离至46 m。
2.5 CAN总线Bootloader
当大量CAN节点构成的复杂CAN网络分布于系统之中时(譬如飞机、汽车、智能楼宇等),当需要对其中的部分节点进行软件维护或者功能升级,若采用物理拆装的方式进行维护,其难度和工作量巨大,这时通过CAN总线的远程加载维护功能,将升级后的固件程序通过网络加载给需要升级的节点,其维护效率将大大提高。通过远程加载技术,工程师可以通过笔记本甚至手持式专用设备在现场完成CAN设备的维护升级,大大提高了设备的可维护性和产品竞争力。
在机载系统上部署CAN总线远程加载软件,用于CAN总线网络节点固件的远程升级加载,实现新一代机载综合系统产品的可制造性和可维护性,提高产品竞争力。通过CAN总线远程加载软件可以向CAN总线网络中任意CAN总线设备在线更新微控制器固件程序,实现节点固件的远程升级加载。主要完成的功能包括:二进制代码解析功能,识别CAN接口卡的功能,符合CAN Bootloader协议的远程加载的功能,具备可视化加载界面的功能。
3 系统运行结果与分析
基于CAN总线的机载控制系统在完成常温、环境试验、暗室测试后转入外场试飞,从实测试飞效果来看,系统运行正常,能够定期上报自检、控制等数据。为了进一步验证控制系统在机载环境下的稳定性与可靠性,进行了不同的试飞科目,共计飞行数十个架次,有效记录约近百个小时。系统工作正常,稳定可靠,未出现通信异常等情况。飞行结束后进行试飞工程师确认,结果正确,功能正常,满足试飞测试要求,试验结果如图9所示。
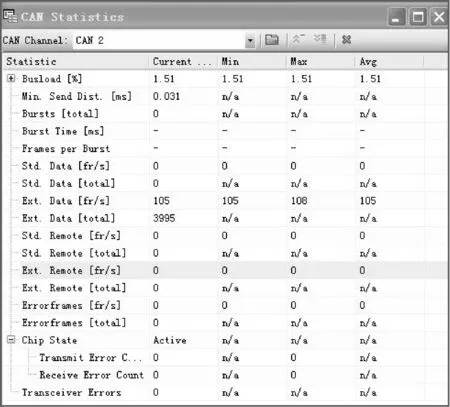
图9 CAN-OE监控数据显示总线稳定无误码
结 语

[1] 饶运涛,邹继军.现场总线CAN原理与应用技术[M].北京:北京航空航天大学出版社,2007.
[2] 任立平,周军.CAN总线高层协议CAN aerospace及其设计应用[J].测控技术,2008,27(2):59-61.
[3] 支超有,唐长红.机载数据总线技术及其应用[M].北京:国防工业出版社,2009.
[4] Robert Bosch GmbH.CAN 2.0 specification,2000.
[5] Robert Bosch GmbH.CAN bus specification 2.0,2000.
[6] 林琦,金惠华,尚利宏.CANaerospace协议实时性分析与研究[J].航空电子技术,2007,38(4):16-22.
[7] 廉保旺,李勇,张怡,等.CAN总线与1553B总线性能分析比较[J].测控技术,2000,19(6).
[8] ARINC specification 825-1[S].The AEEC Executive Committee,2010.
[9] Interface specification for airborne CAN applications V1.7[S].Michael Stock Flight System,2001.
Design and Application of CAN Bus Based on Airborne Control System
Wu Xiaoyue
(Science and Technology on Electronic Information Control Laboratory,China Electronic Technology Group Corporation,Chengdu 610036,China)
Based on the CAN bus application in the main airborne project design,the design is completed including the system design,the topology design,the connector,the software design.The experiment results show that the airborne CAN bus control system has the advantages such as low latency,safe and reliable,strong scalability,remote upgrade maintenance.The system can apply in the control system of a new generation of airborne electronic system.
CAN bus;airborne control;remote load
TJ306
A
�士然
2017-03-02)