EMCCD相机热电制冷温度控制系统研究与设计
2017-06-23苏家雨任国强王明富聂山钧
苏家雨+任国强+王明富+聂山钧
摘 要:EMCCD作为当今世界上灵敏度最高的成像器件之一,在航空航天、夜视导航、生物医学等众多研究方向均有广阔的应用前景,为了降低EMCCD相机热生暗电流并提升相机倍增增益,需对相机芯片进行深度制冷并尽可能提高控温的稳定性,保障合适的温度变化速率。由于制冷温差大而导致需要为TEC提供较大的制冷功率,设计了可提供较大制冷功率的热电制冷系统与具有高稳定度的温度数据采集系统,并采用积分限幅的数字PID控制算法,可为TEC提供的最大制冷功率超过100 W、温度控制稳定度为±0.1℃,温度变化速率约为5℃/min,均满足指标要求,提升了EMCCD相机性能。
关键词:EMCCD;热电制冷;数字PID;温度控制;积分限幅
中图分类号:TP39;TN215 文献标识码:A 文章编号:2095-1302(2017)06-00-03
0 引 言
电荷耦合器件(CCD)最早于1970年由美国贝尔实验室率先提出,并于1971年研制出第一个可实用的CCD器件。CCD具有体积小、低噪声、质量轻等特点,同时利用CCD可获得高精度的测量并对目标进行准确定位。电子倍增电荷耦合器件(Electron Multiplication Charge Coupled Device, EMCCD)是一种近些年才出现的高灵敏度探测器,它具有很高的量子效率和特殊的读出噪声抑制机制,使其在较高的读出速度下仍具有很低的噪声水平。基于这些优势,EMCCD不仅可应用于天文中的暗弱目标观测和波前探测(Wave-Front Sensing)[1],在生物医学领域,EMCCD还可进行细胞荧光成像,被安装在各种显微镜上,观察细胞活动。此外,EMCCD还在微光夜视、单光子计数、光谱分析等方面具有广阔的应用前景[2]。
1 温度对EMCCD相机性能的影响
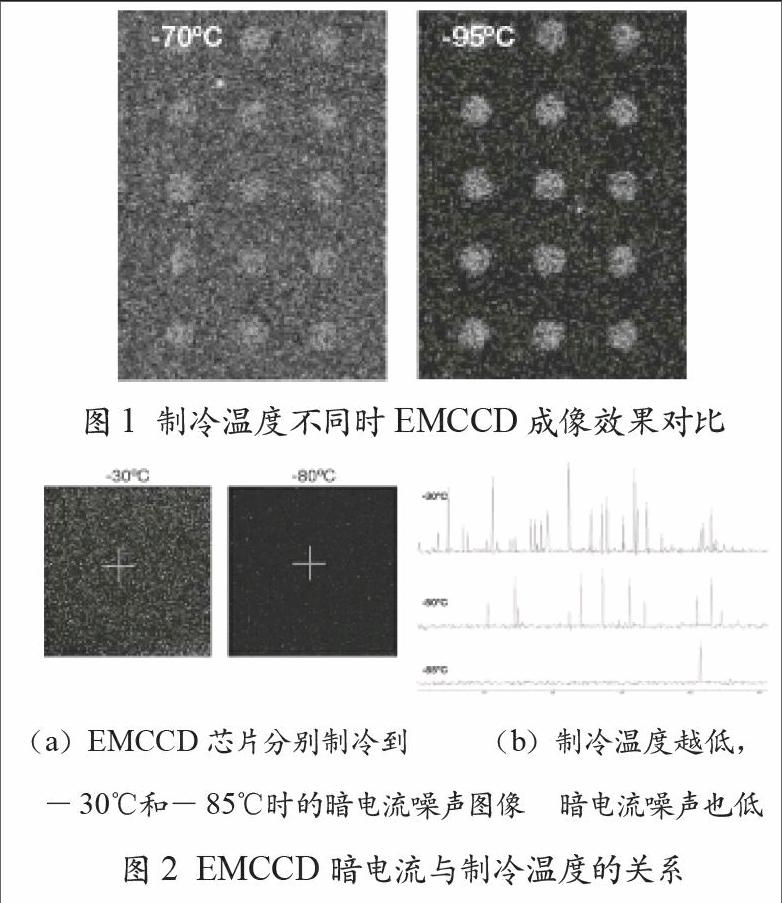
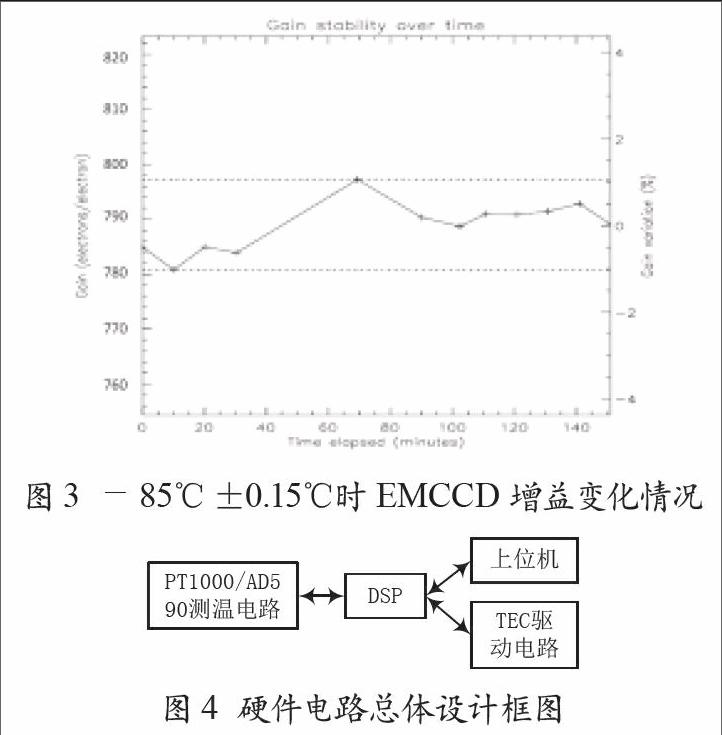
虽然EMCCD性能优越,但EMCCD在工作中存在许多噪声源,严重制约其性能。其中暗电流噪声是主要的噪声源之一,主要来源于耗尽区的本征热激发产生的载流子。通过对抑制EMCCD暗电流噪声技术的研究,人们发现降低温度可有效减少暗电流。制冷温度不同时EMCCD成像效果对比如图1所示。左右两边分别显示EMCCD相机在制冷到-70℃和 -95℃时的图像,可以明显感觉到制冷温度越低,可获得的图像更为清晰。一般而言,温度每降低5~7 K,暗电流便降为之前的一半,EMCCD暗电流与制冷温度的关系如图2所示。(a)图中为EMCCD芯片分别制冷到-30℃和-85℃时的暗电流噪声图像,可明显看出温度越低,暗电流的噪声点更为稀疏。从(b)图中可看出制冷温度越低,暗电流噪声也低。因此使用制冷技术是抑制EMCCD中暗电流的有效途径之一。随着温度的降低,EMCCD中的暗电流迅速下降,从而提高了EMCCD的探测灵敏度,改善了EMCCD的性能。同时,EMCCD图像传感器的温度控制稳定性决定了EMCCD电子增益变化量的大小。图3所示为EMCCD在-85℃±0.15℃时的增益变化曲线。综上所述,若要使EMCCD获得较佳性能,则需要对EMCCD相机进行高稳定度的深度制冷[3-6]。
2 EMCCD热电制冷系统硬件电路设计
一般的制冷方式主要包括液氮制冷、斯特林制冷和TEC制冷。由于TEC制冷具有體积小、噪声小、可实现智能温控等优点,因此本文采用TEC制冷方式实现对EMCCD相机的温度控制[5]。
首先通过AD590测温电路或PT1000测温电路采集温度数据,经运算放大等处理后发送至四通道AD转换器AD7682,最终传输至TMS320F28335数字信号处理器,通过PID计算得到输出量后分别通过PWM口输出脉冲驱动MOS管桥式驱动电路和DA转换器,最终驱动TEC工作,实现对EMCCD的制冷。硬件电路整体设计框图如图4所示。
硬件电路主要包括温度数据采集模块、计算控制模块和TEC驱动模块部分。
温度采集模块包括AD590测温电路和PT1000测温电路及相应的信号运算和放大电路、AD转换电路。
AD转换器采用ADI公司生产的16位、4通道AD转换器AD7682,其模拟输入电压范围为0~5 V,与DSP采用SPI进行接口和数据通信。将PT1000和AD590温度传感器测量的小电压进行放大的电路则以AD7682技术手册所推荐的运算放大器ADA4841为核心部件设计放大电路,可分别将PT1000和AD590温度传感器的测量电压放大并映射满AD7682 0~5 V输入范围。
计算控制模块以TMS320F28335为核心,包括最小系统电路、AD接口电路与上位机通信模块电路和输出模块接口电路及为整个系统提供电源的模块等。
DSP与上位机的数据通信采用RS 422接口,而接口芯片使用MAXIM公司生产的MAX488。系统对TEC的驱动电压使用12/24 V直流电压,这一部分电压直接使用外部直流源进行输入,而AD转换器、DA转换器等使用的5 V电压则通过开关电源芯片A8498进行降压处理,其输入电压为12 V或24 V,通过输出端电阻匹配可得5 V/3 A的固定输出。DSP所需的3.3 V电压和1.9 V电压通过TI公司推荐的专为TMS320F28335供电的电源芯片TPS767D301进行降压,其输入电压为A8498提供的5 V电压,而拥有的两路输出通道分别输出3.3 V/1 A和1.9 V/1 A。
驱动电路包括以MOS管为开关的桥式驱动电路和以DA转换器和运放组成的驱动电路。DA转换器采用TI公司生产的16位双输出通道的DA转换器DAC8552。该转换器可提供的输出电压范围为0~5 V,与DSP采用McBSP接口,在使用时,直接用DSP向其发送一个24位数据配置其寄存器,该24位寄存器的前8位控制输出性能,后16位则被转换为模拟量,该模拟量经3倍放大后作用于TEC,实现制冷功能。
3 控制系统算法研究及软件设计
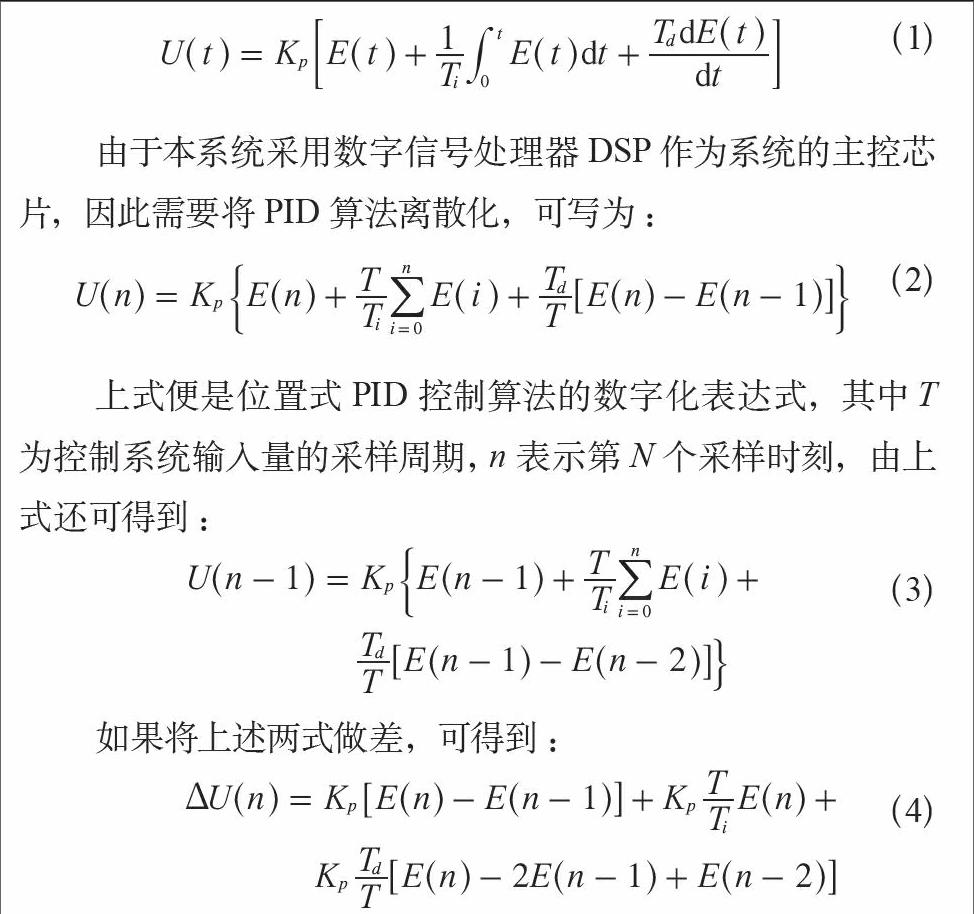
由于PID控制算法已经在大量控制系统中得到了验证,本文将采用PID算法对本系统进行控制量的计算并做出优化和改进。传统PID控制算法的控制器输出量同控制器输入量及其积分、微分成比例,用公式表示为:
由于本系统采用数字信号处理器DSP作为系统的主控芯片,因此需要将PID算法离散化,可写为:
上式便是位置式PID控制算法的数字化表达式,其中T为控制系统输入量的采样周期,n表示第N个采样时刻,由上式还可得到:
如果将上述两式做差,可得到:
此时的输出量为第N个采样时刻相对上个采样时刻的增量。由增量式PID控制算法的数学表达式可知,增量式PID控制算法的计算量仅与三个时刻的采样值有关,因此与位置式PID控制算法相比,增量式PID控制算法的误差不会持续累加,且计算相对简单,占用控制器内存较少。因此本文采用增量式数字PID控制算法实现对系统的控制。
此外,由于系统要求以较慢的速率制冷CCD芯片,因此温控过程调节时间较长,
在这段时间内,PID式中的积分量将积累过大的数值,但执行器只能以其极限能力运行,而这将造成积分饱和,当系统输出超过给定值后,偏差反向,但由于大的积分积累值,控制量需要一段时间脱离饱和区,输出无法及时反向,因此引起系统产生大幅度超调,甚至使系统不稳定。针对这一问题,本文采用积分限幅的数字PID控制算法。
积分限幅的基本原理是选择两个适当的阈值作为积分上下限,当积分控制项的输出超过设定范围时,用上下阈值代替积分输出值,可有效避免PID控制器的深度饱和[7,8]。
在确定了具体的控制算法后,需要确定PID控制器的比例系数(Kp)、积分时间常数(Ti)、微分时间常数(Td)、采样周期(T)积分门限的上下限阈值。
由于温控系统难以用理论计算的方法整定PID参数,一般采用工程整定法(试凑法)进行参数整定,其具体操作方法为:
首先整定比例部分,将Kp从小到大增大,直到系统趋于震荡,记录此时的取值,并假设其为KPM,此时取Kp=(0.6-0.8)KPM,并将积分时间常数Ti从较大值逐渐减小,直到系统的静态误差消除,此时的Ti值设定为系统的积分时间常数。由于微分时间常数的设置主要是为了使系统更快地到达设定值,而本系统希望以较慢的速率制冷CCD芯片,因此将微分时间常数设置为0。
采样周期的取值从精度考虑,采样周期越小,所能得到的控制精度越高,但如果采样周期过小,又将使得控制器难以完成数据的处理和控制量的计算。
为保证系统性能,控制系统采用定时器中断方式,定时时长为采样周期T。主程序和积分限幅的增量式数字PID控制算法流程图如图5所示。
4 实验结果与分析
首先开启水冷箱(水冷箱温度为10℃),并将TEC冷端温度设置为-20℃,当温度曲线在-20℃波动时,采集其曲线并计算其稳定度。之后分别将TEC冷端温度设置为-50℃、-80℃,并在温度曲线趋于稳定时获取相关数据并计算控制稳定度。所得曲线如图6所示。
从图中可以看出,控制系统温度波动量的最大值约为0.1℃,此控制效果较好,与国内目前公开文献中提及的对制冷型CCD的温控稳定性最好的文献效果相当,且本系统可提供更低的制冷温度[9]。因此对于具有大惯性、大滞后而执行器执行能力有限等特点的温度控制系统采用基于DSP积分限幅的PID控制器可取得良好的控制效果。但在控制器的应用过程中仍存在一些改进空间,如积分门限的更精确确定、PID控制参数的更准确整定、系统硬件电路的抗干扰性能增强等。因此,可进一步完善和修改该控制系统。
5 结 语
本文为EMCCD相机设计了基于DSP的温度控制系统,包括硬件电路(温度采集电路、计算控制电路、TEC驱动电路)的设计和软件算法(积分限幅的增量式数字PID控制算法)的设计。结果表明,该控制系统具有良好的动、静态性能和稳定性,温度控制稳定度和温度变化速率均满足设计需求。同时,该系统还适用于其他科学级图像传感器的芯片制冷,拥有广阔的应用前景。
参考文献
[1]刘磊,常本康,李蔚.微光夜间驾驶仪探测距离研究[J].兵工学报,2003,24(3):342-346.
[2]谢宗宝,张涛.EMCCD用于空间生物光成像探测的可行性分析[J].光电工程,2010,37(5):85-90.
[3]王明富.电子倍增CCD驱动技术及其噪声特性研究[D].北京:中国科学院大学,2010.
[4]王明富,杨世洪,吴钦章.电子倍增器件 CCD60 噪声特性分析[J].光电工程,2011,38(7):145-150.
[5]何凯.EMCCD相机致冷技术研究[D].北京:中国科学院大学,2015.
[6]程攀.天文卫星相机焦平面制冷系统的设计与实现[D].北京:中国科学院研究生院,2012.
[7]孙宏伟.基本PID控制算法的自动化温湿度控制器[D].上海:上海交通大学,2015.
[8]孙筠.采用改进PID算法的局部温控仿真[J].华侨大学学报(自然版),2016,37(3):287-290.
[9]江孝国.高稳定度的CCD冷却控制系统研究[J].计算机测量与控制,2006,14(2):200-201.
[10]張瑜,张升伟.基于铂电阻传感器的高精度温度检测系统设计[J].传感技术学报,2010,23(3):311-314.
[11]于媛美.PCR仪温度控制系统的研究与设计[D].西安:西安工业大学,2013.
[12]王春霞.模糊自整定PID温控系统的仿真研究及设计[D].长春:东北师范大学,2005.
[13]王正林.MATLAB/Simulink与控制系统仿真第三版[M].北京:电子工业出版社,2008.
