下肢外骨骼系统稳定性分析和步态控制研究
2017-06-19徐元杰樊军
徐元杰+樊军
摘 要:本文在传统ZMP稳定性判据的基础上对ZMP稳定性判据进行了改进,建立了人的外界干扰因素对系统稳定性的影响的数学模型,然后对下肢外骨骼人机系统的运动过程稳定性进行研究,按最大稳定裕量原则对步态进行优化。为了在不同情况下保持平衡,提出了步幅、调整新的控制措施。通过仿真实例验证了所提出方法的正确可行性。
关键词:下肢外骨骼;ZMP;稳定性;优化
中图分类号:TH12 文献标识码:A
外骨骼步行稳定的重点在于如何保持支撑脚与地面的相对安稳,维持外骨骼人机系统的平衡,使外骨骼穿戴者步行时不发生倾倒。目前,零力矩点(Zero Moment Point,ZMP)是基于外骨骼人机系统动态步行是否稳定的重要指标。ZMP是人机整体所受的重力、惯性力和地面反作用力三者的合力,在地面上投影应呈限于两脚之间,即支撑脚底与地面接触所构成的最小凸多边形有效撑持区间内,则外骨骼人机系统才能使稳定行走。下肢外骨骼在靜态行走时人机系统均处于平衡稳定状况,对于地面上重心的投影能够一直处于支撑面之内,因此外骨骼人机系统能达到稳定状况。但是,下肢外骨骼在穿在人身上后动态步行时,人体的外界不确定性因素使外骨骼在前向和侧向产生惯性力作用,会使ZMP随着摆动脚的落地变化可能超出支撑区域,这样就造成了人体在稳定与不稳定状态中来回变换。可知ZMP稳定性判据对系统外界的干扰因素的动态稳定性评估具有一定的局限性。因此在ZMP稳定性判据的基础上需对ZMP稳定性判据进行改进,改进的ZMP动态稳定性评估方法能有效地对下肢外骨骼冠状面和矢状面内动态稳定性进行评估。由于人机系统的运动过程比较复杂,如果同时考虑人机系统在行走过程中的侧向和前向运动之间的耦合,那么分析会比较复杂。结合步态实际特征,为了得到人机系统运动受扰时平衡状态的计算判定方法,本文仅考虑对在侧向运动人机系统的稳定性分析。
1.动态步行稳定性检测
下肢外骨骼在动态行走时,质心具有速度,即便质心投影处于支撑区域内部也有存在失稳的可能性,因此需要判断下肢外骨骼运动受扰时是否处于平衡状态。由于下肢外骨骼人机系统的侧向运动可以简化为倒立摆的模型运动并且具有周期性。
设人机的质量m集中于质量中心(center of mass, COM)。其中D1为质心的位移;D2为人体脚底在地面的反力与压力中央的位移,它的范围被限制在人体的撑持面区域(即BOS)内,其极限值分别为D2-min和D2-max,根据动力学原理,运动中若平衡,则人机系统运动中平衡的判断条件为
其中,人机系统质心的速度大小是V1。
2.改进的动态稳定性评估方法
若参数发生相应的变化时,由(1)式可以很快判断出此时人机系统是否平衡。如果人机系统的协同控制能力处于失稳状态,首先要确定外骨骼人机系统所在的支撑多边形(BOS)中哪个边是旋转边界,由此可以计算出来ZMP到旋转边界之间的距离。本文假设脚掌形状为矩形,那么两只脚共包括8个边。候选的BOS是所有连接两只脚的8个角的连线。左脚的顶角点分别用P1,P3,P5,P7来表示,右脚用P2,P4,P6,P8表示,其中P(X,Y)。通过两个点Pi和Pj的连线用Lij表示。
则ZMP到Lij的距离可表示为
其中,Pij是zmp到Lij的垂足的位置矢量。
假如已知ZMP所处的位置,则通过等式(4)可以来确定旋转边界。由于在实际步态稳定控制时需要按最大稳定裕度d的要求对规划的外骨骼人机系统的姿态进行优化,亦可采用公式(5)来定量描述步态的稳定程度。当d大于零时,步态处于平稳状态,且d的值越大,稳定性越好;当d等于零时,步态临界处于稳定状态;当d小于零时,则步态处于不稳定状态。
3.步态控制策略
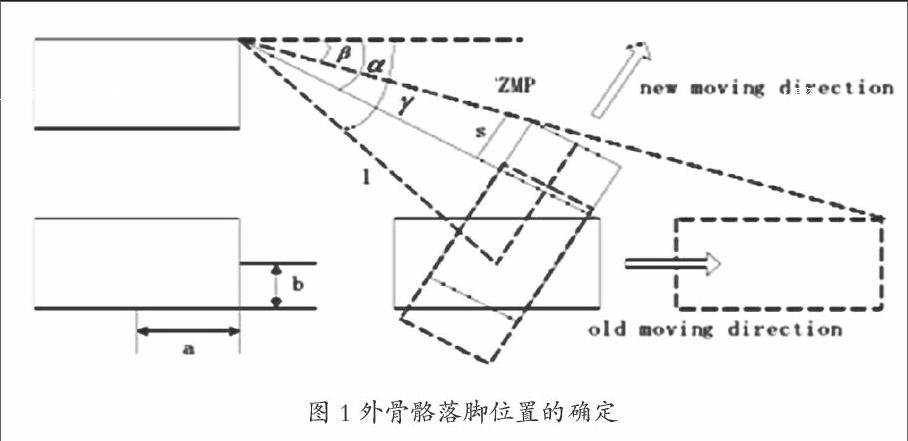
可以通过采用跨步的方式来改变撑持多边形,从而达到下肢外骨骼在受到外力扰动的情况下仍保持其平衡。人采取的动作和行为,其机理是改变支撑多边形,由于协调控制的要求,必须研究跨步随动的控制机制(策略)。如图1所示,在没有外部力量支撑的条件下,则移动的脚应当处于正常步副的平面位置上。但在外力作用情况下,下肢外骨骼要绕着旋转边旋转。这时,脚的落地位置应该改变,以达到人机系统保持平衡的要求。
脚所移动的距离I *f 可由下计算得出:
其中,a*为脚的移动方向改变角α为旋转脚与水平线夹角,β为移动后脚与水平线夹角。
假设我们忽视脚部的额外移动所发生的重心改变量,则下肢外骨骼在新的落脚点与落脚时将是十分平稳的。
4.简述仿真分析
完成人机系统的建模之后,我们采用动力学分析软件ADAMS构建外骨骼人机系统的仿真型,对扩大步幅的仿真进行了考量。通过一系列的数据可以看出,当受到来自外部力量的作用时,外骨骼人机系统的平稳进行也能够通过调整步幅来维持。
结语
本文对ZMP稳定性判据进行了改进,对人的外界干扰因素对下肢外骨骼人机系统的运动过程稳定性进行研究,按最大稳定裕量原则对步态进行优化。将下肢外骨骼简化为倒立摆模型来进行动态步行稳定性分析。讨论了维持稳定的方法:改变脚的着地位置。数字化仿真的模式体现了该方式的可行性。但如何实现可穿戴式下肢外骨骼在外界干扰下的实时控制还有待进一步研究。
参考文献
[1]徐汝龙.一种可穿戴式下肢康复机器人的步态规划及康复策略[D].西华大学,2012.
