某工作船主机异常停车故障的分析与处理
2017-06-19陈深,胡清,孙显
陈 深,胡 清,孙 显
(安庆中船柴油机有限公司,安徽 安庆 246005)
技术交流
某工作船主机异常停车故障的分析与处理
陈 深,胡 清,孙 显
(安庆中船柴油机有限公司,安徽 安庆 246005)
文章针对某工作船2台主机并联运行时出现的异常停车故障现象,进行故障原因分析,通过现场调整PID参数,并在高负荷下进行测试,经过长时间运行,无异常停车现象发生,验证了该处理方案的有效性,最终解决了故障问题。
电子调速器;异常停车;PID参数
主机在船舶推进动力装置[1]中扮演着至关重要的角色,是全船的心脏,因此对于主机的安全运行保障就显得尤其必要。若船舶在运行或作业过程中出现主机突然停车的事故,对于某些特殊用途的船舶或其他相关设施可能会造成重大危害,所以在引起危害前必须尽快找出影响异常故障发生的关键因素并制定合理的方案,才能解决问题,避免故障再次发生,为船舶的安全运行提供可靠的环境。
1 故障现象
某深水三用工作船采用4台柴油机、双可调螺距螺旋桨驱动轴带发电机的推进系统。每2台柴油机分别通过高弹性联轴节,将功率输入1个齿轮箱,再经中间轴系与调距桨联接。每台齿轮箱还分别通过高弹性联轴节与1台轴带发电机联接,2台主柴油机可同时也可单独驱动轴带发电机。该船为更方便地实现2台左或右主机在并联模式下运行,4台主机均采用了电子调速器,通过2台电调控制器(Woodward 723Plus)之间的通讯电缆和负荷分配线连接,同时利用设定软件在控制器中进行简单配置,其系统结构如图1所示。
该船在执行作业或航行任务时,绝大多数情况下均采用2台主机并联运行模式。该船交付使用半年后,某次在海上执行航行任务时,突然出现并联运行过程中的1#与2#2台左主机出现异常自动停车现象,导致船舶瞬间失去动力。在首次出现上述故障现象后,一旦2台主机在较高负荷下(60%以上额定负荷)运行几分钟时间,都会出现此故障,严重影响了该船的正常营运。
2 故障分析
对于该船主机反复出现的异常停车故障现象,技术人员从以下几个比较可能的方面进行逐步分析。
2.1 主机安保系统动作
当出现如主机滑油压力过低或出现真实超速等安全情况时,安保系统[2]将自动发出指令给位于柴油机上安装的燃油停车电磁阀,该停车电磁阀得电使控制空气进入燃油切断装置工作,从而驱动燃油公共连杆朝停车方向转动,达到断油停车的目的。在上述各种安保动作的情况下,控制系统会及时地在主机控制箱上发出声光报警信息,提醒船员注意。在调阅了该船集控室监测报警系统监控电脑的历史报警记录发现,在几次故障发生的时候,均无安保方面的报警记录,主机控制箱上记录报警的触摸屏报警信息列表里也没有相关记录。从这一点进行判断,停车故障可能不是由主机安保动作引起的。为了进一步验证这个判断的正确性,服务工程师在2台故障主机的燃油切断装置的活塞杆露出部位均涂抹上黄油,如图2所示。如果是由主机安保动作引发的停车情况,该活塞杆会向切断装置控制气缸的内部方向运动,在此运动过程中必定会将该部位的黄油从活塞杆上挤出,这种明显的变化可以作为验证的手段,船员不必在机舱中对燃油切断装置时刻保持关注。船上人员操作将主机负荷逐步提高,当故障出现后,再次到机舱观察切断装置的活塞杆部位,发现原先涂上的黄油保持原样,从而排除了主机安保引发停车的可能性。
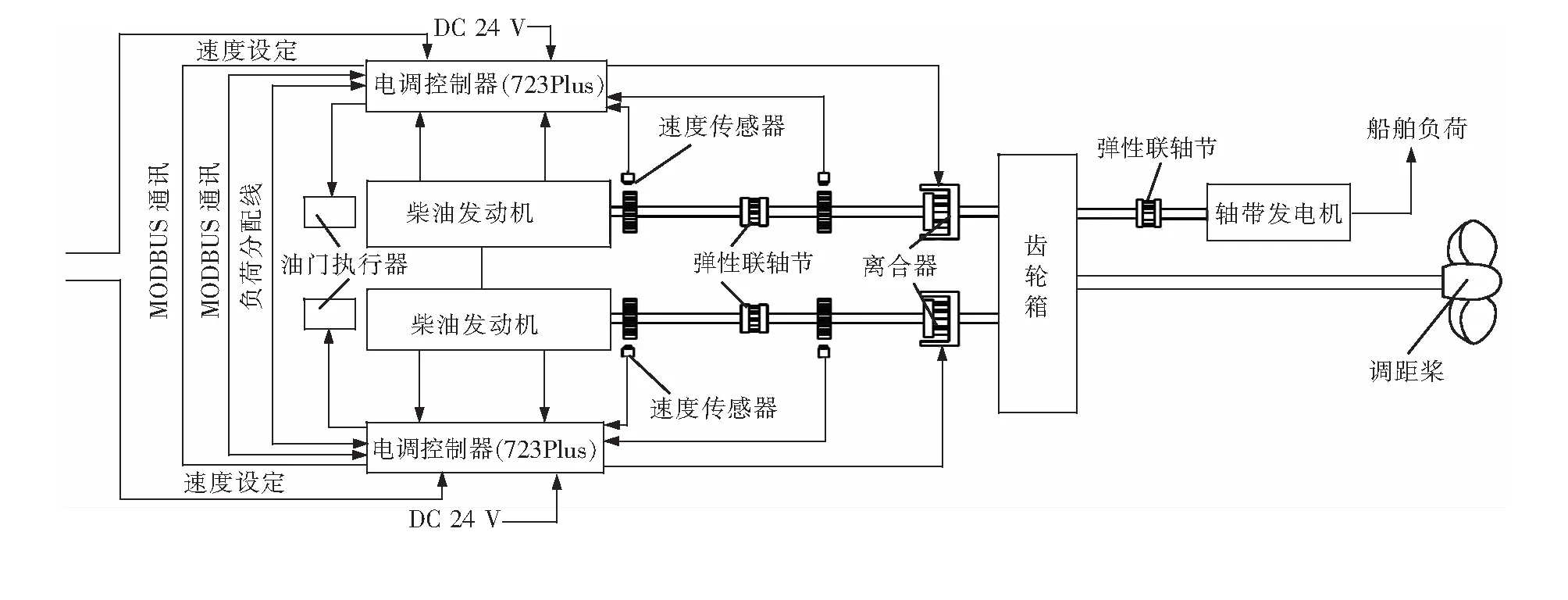
图1 双机并联系统图
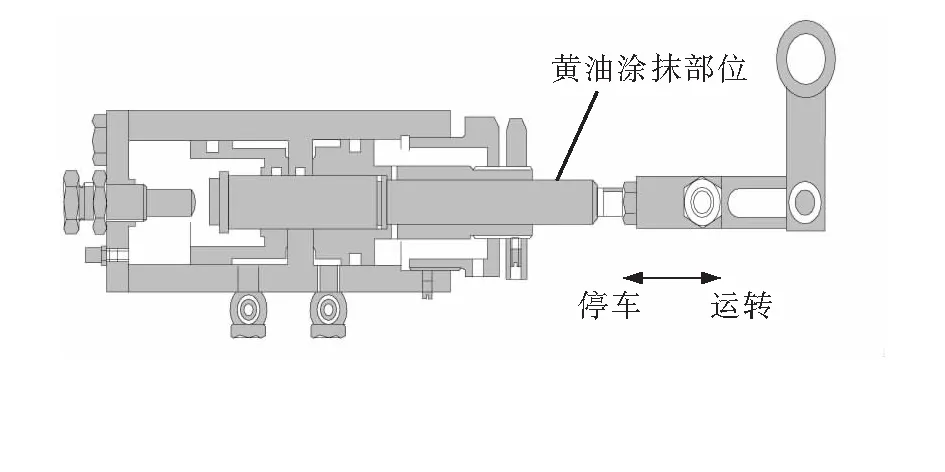
图2 燃油切断装置
2.2 安保系统相关电气元件故障
安保系统中比较重要的电子元器件,如柴油机转速传感器、转速传感器监控模块以及PLC模块一旦出现故障,或者在主机运行过程中受到船上其他电子设备的干扰,在屏蔽措施没有做好的情况下,柴油机转速传感器可能会发出虚假的脉冲信号,这种虚假脉冲信号被安保系统PLC控制器接收并处理,会自动执行超速停车指令并导致主机停车。此种情况和第一种分析情况在停车动作的执行过程上是一样的,同时也一定会伴随有声光报警提示并自动记录。服务工程师首先检查了船上对于柴油机转速传感器从机上接线箱到控制箱的电缆情况,从该电缆是否为屏蔽电缆、转速传感器信号是否是单独的电缆、屏蔽电缆的屏蔽层有没有进行接地处理等几个方面分别检查,该船以上几个方面均符合相关规范以及技术要求[3]。同时,对曾经在其他船有故障案例出现的转速传感器监控模块以及PLC模块均进行了更换,更换后异常停车现象仍然会发生,说明以上电子元器件质量是完好的,对停车现象不构成影响。
2.3 主机电子调速器执行器故障
该船主机配置Woodward公司的UG8执行器,是该型号柴油机在国内首次和电子调速器配套使用,缺乏使用经验。经与调速器厂家的技术人员进一步了解,电子调速器的执行器只是单纯的执行机构,本身不具备调速功能,其主要作用就是接收723Plus控制器输出的0~200 mA电流信号,通过控制器自身改变的电流大小来驱动内部的电机工作来加、减油门,从而实现转速的调节。从以上说明可以看出,执行器不会出现主动拉油门的动作让柴油机停车,它只会被动地根据控制器给出的调节指令去执行相应的动作。同时,从船员那里可以获得一些重要信息,2台主机如果分别在单机模式下工作,即使负荷加到80%以上长期运行,也不会出现运行中无故异常停车的现象,故而判断主机电子调速器执行器故障的可能性是非常小的。
2.4 主机电子调速器控制器及外围供电故障
2台主机中任意一台电子调速器723Plus控制器如果出现故障,会不会引发前面所述的停车故障现象呢?比如说控制器故障导致内部设定好的参数因为某种原因发生了变化,而这一点是很好判断的,可以用随机配置的手持式编程器查看相关设定参数,和该船交船前的系泊试验时记录的参数进行对比,发现所有的参数都和以前保持一致,没有任何变化。随后,技术人员查看了该型号控制器的操作说明书,其规定的供电范围为DC 18~40 V。调速器厂家工程师怀疑是否并联运行主机在较高负荷时出现控制器供电不足(一旦供电电压跌至18 V以下,可能会出现异常故障)。根据该船主机控制系统图纸要求,723Plus控制器电源从主机安保箱中提供,该电源来自船上UPS电源箱。通常情况下,UPS电源是不间断供电模式,且能保持其输出电压的稳定性。重新启动主机,并让2台主机并联运行,驾驶室按照要求逐步地提高负荷,同时在此期间技术人员用万用表直流电压档测试控制器的供电电压,发现该电压值维持在DC 23 V左右。一直到出现2台主机停车故障,观察发现万用表显示数值依然保持DC 23 V不变,并没有降低或超出至该控制器供电电源要求范围的现象。
2.5 电子调速器PID参数与发动机不匹配
对于配置电子调速器的主机,在主机厂台架试验以及船厂系泊试验期间,都要根据实际试验负荷情况的不同,对每1台主机配套的电子调速器的参数进行调试,主要是PID参数的调整。技术人员利用Woodward调速器公司专为电子调速器设计的在线监控软件Toolkit在笔记本上对主机的转速变化进行监控。现场监测到的转速曲线显示,如图3所示,当并联运行主机提高到较高负荷时,一段时间(大概2~3 min)以后执行器控制信号发生抖动,最终导致停机。因为2台主机处在并联运行模式,转速的波动对负荷分配有很大影响,1台主机停机,故障主机的所有负荷将瞬间转移到和其并联的另1台主机上,导致另1台主机出现超负荷直接停机。经现场分析,结合监控曲线可以初步判断,出现这种现象可能是比例增益过大导致执行器信号震荡所致。该船这2台故障主机在主机厂台架试验和船厂系泊试验时PID参数都经过了多次调整,但对于在较高负荷下的工况可能还不是很合适。因为发动机状态是会发生变化的,随着运行时间的增加,发动机的运行特性不可避免的会发生变化。PID参数为了能够涵盖所有的变化是需要不断摸索的,一般需要在台架上进行充分的实验。因此,技术人员分析现在出现的问题就是发动机随着磨合稳定,特性有所变化,而前期参数没有经过足够多工况的验证,当发动机特性变化导致PID参数未涵盖其变化导致输出波动进而在高负荷停机。针对以上情况,并根据故障发生时转速波动曲线变化,综合分析之后,决定采取的解决方案是将2台电子调速器的比例增益向下调整。

图3 转速监控曲线(调整PID前)
3 故障处理
再次启动主机之后,技术人员要求船上驾驶室先让2台主机在低负荷下运行一段时间,以便对PID参数进行调整,并在线观察调整后的转速曲线变化情况,调整界面如图4所示。
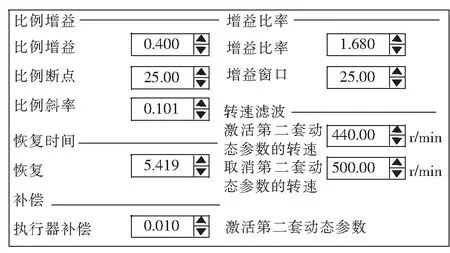
图4 PID参数修改界面
分别对2台故障主机的电调控制器PID参数调整如下:1#比例增益 Gain 由0.9调整至0.66;2#比例增益Gain 由1.1调整至0.89,调整之后在主机高负荷情况下监控发现转速波动情况明显好转,不过依然不太理想。为了使转速波动范围进一步减小,技术人员继续调整PID参数,1#比例增益 Gain 由0.66调整至0.4;2#比例增益Gain由0.89调整至0.72。经过再次调整后,2台主机运行转速曲线非常平稳,监控截图如图5所示。随后,该船1#与2#2台主机在并联模式下高负荷工况运行约4 h未发生任何异常。自此次调整后,该船主机已经无故障运行近半年时间。
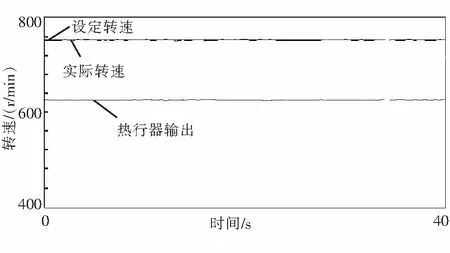
图5 转速监控曲线(调整PID后)
4 结束语
经过此次主机异常停车故障分析与处理过程,可以得出如下结论。
1)随着柴油机状态的改变,被控制对象的动态特性与之前相比发生了变化,超出了PID参数的控制范围。因此PID参数与发动机之间出现不匹配,引起执行器控制信号抖动,从而使柴油机转速波动过大造成转速传感器检测失真,触发停车。
2)经过多次调整,使电子调速器PID参数和发动机之间达到了良好的匹配,已能覆盖出现故障的1#与2#2台并联运行主机所有的工况,在今后的使用中应能良好的工作。
船舶主机出现的故障现象多种多样,本文对今后船舶主机出现类似故障现象的解决具有一定的借鉴与参考意义。
[1] 黄少竹. 船舶柴油机[M]. 大连:大连海事出版社,2005.
[2] 郑凤阁. 轮机自动化[M]. 大连:大连海事出版社,1998.
[3] 中国船级社. 中国船级社国内航行海船入级规范[M]. 北京:人民交通出版社, 2006.
In regard to the abnormal shutdown of the two main engines of certain workboat during parallel running,all the possible influencing factors are analyzed for seeking solutions to solve the problem.The specific measure is to adjust PID parameters at site and to conduct test under heavy load.After a long time of running,no abnormal shutdown is found.As a result,the effectiveness of this solution is verified.
electronic governor;abnormal shutdown;PID parameters
陈深(1980-),男,安徽安庆人,工程师,学士,主要从事柴油机电气控制工作。
U672
10.13352/j.issn.1001-8328.2017.02.001
2016-12-02
