基于Petri网的交通信号控制系统的建模与分析
2017-06-17万铮
万铮
摘 要:随着物联网的发展,智能交通的应用前景广阔。文章提出一种基于Petri网建模的智能交通信号控制系统,其特点是局部控制、共同负责。交通信号控制系统基于安装在车道上的车辆检测器反馈信息,改变信号相位顺序来提高路口的道路使用率。经过仿真模拟,该模型在安全前提下能够有效减少车辆排队等候时间。
关键词:交通物联网;Petri;智能交通;信号控制
1 互联网发展研究概述
互联网发展至今,经历了文件互联(Internet of Document,IoD)、人联网(Internet of Human,IoH)到如今的物联网(Internet of Things,IoT)3个阶段。国际电信联盟(ITU)对于物联网的定义为[1]:将各种传感设备和互联网结合起来而形成一个巨大的网络,让所有物品都连接在一起,方便识别和管理。由以上定义可知物联网的核心还是互联网,其通过传感器、射频识别装置(Radio Frequency Identification Device,RFID)、执行器等设备与物理世界发生联系。
自从2009年温家宝主席提出“感知中国”至今,物联网在中国迅猛发展,与各传统行业紧密结合,催生了各种基于物联网的智能系统应用。包括基于物联网的智能交通监控系统,其通过采集、分析数据,对驾驶员进行引导和管理来反馈交通状况。交通监控系统可分为交通信息采集子系统、交通信息提供子系统、监控中心。
本文旨在提出一种基于Petri网结合前端分布式的物联网体系结构的交通信号控制建模方式,以提供服务为目标,实现“高度自治下的共同负责制”。
2 路口模型
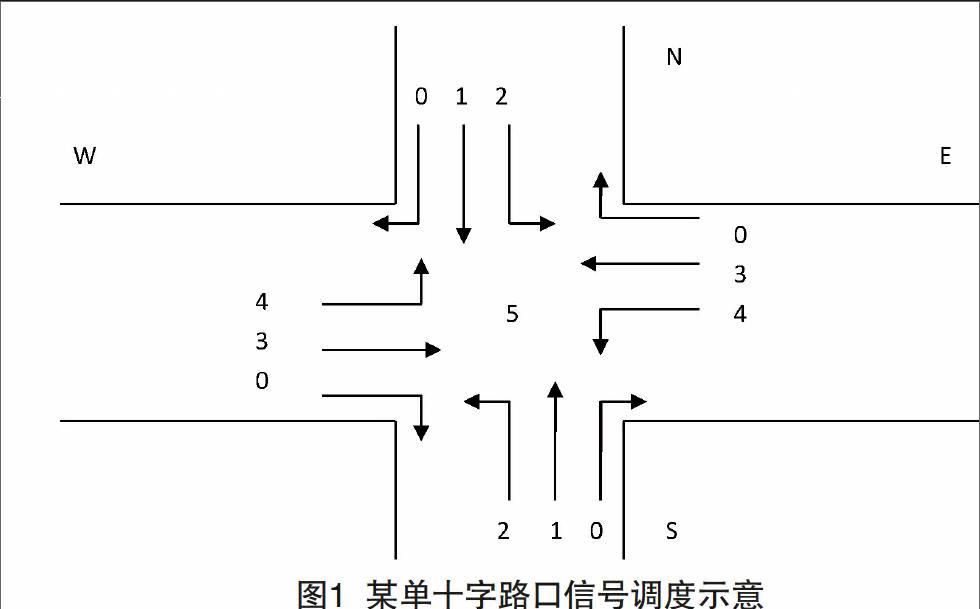
在单路口的交通调度中,主要需要考虑的设计是信号灯的相位顺序和相位延时,图1为某单十字路口信号调度示意。
在图1中,车道5表示设计为行人通过,此车道与其他所有车道互斥,如此便可实现人、车完全分离,避免行人与右转车和左转车发生冲突的可能性,且NS与WE两个方向的行人可以同时放行,车道0为4个方向的右转车道,右转车道只和车道5冲突,故车道根据空间关系可按以下情况分组,车道0,1为一组,车道0,2为二组,车道0,3为三组,车道0,4为4组,车道5单独为五组,共计5个相位。其中N,S,W,E表示北、南、西、东4个方向,P表示行人通过,NS表示方向由北往南,其他以此类推。需要说明的是,由于右转车除了和行人冲突外,和其他所有方向的通行车不冲突,故SE,EN,NW,WS 4个方向的右转车在前4组相位中全部允许通过。
控制系统主要控制的是相位顺序和相位延时。相位顺序在控制上,除非某个相位无车辆,否则不应改变相位顺序,依旧按照每组顺序不变。相位延时在控制上,则可根据各个车道排队等候车辆的数量,依据策略,由路口交通信号调度控制器上下浮动,力求增加路口利用率,降低车辆等待时间,同时兼顾公平。
3 信号控制模型分析
目前应用最多的信号控制基本场景是一个开环控制结构,5个相位的控制延时按照既定程序执行。开环结构的优点在于实施简单,缺点在于缺乏反馈,无法根据交通状况进行调整。
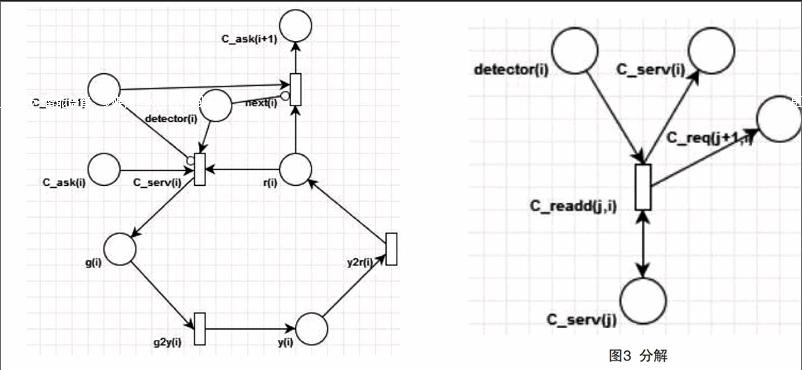
图2为某一相位变迁图,用C_serv(i)表示对某一相位提供服务。一个相位的动作包括变绿灯、变黄灯和变红灯3个动作,变绿灯动作包含在C_serv(i)当中,变黄灯和变红灯两个动作分别用g2y(i)和y2r(i)表示。用C_ask(i)表示询问相位i是否需要服务,next(i)表示转向相位i的下一个相位,当detector(i)没有托肯,即当前相位i没有服务请求,且后面相位有服务请求,即C_req(i+1)有托肯时,应跳过相位i的服务,所以有detector(i)到next(i)的约束弧。如果后面相位没有服务请求,则不能跳过当前相位服务,所以有C_req(i+1)到C_serv(i)的约束弧。
对车道的服务按照车道相位顺序来进行,当所有的路口都没有服务请求时,则按顺序动作。当相位1为绿灯时,假如此时相位4有车也要通过路口,则需在相位1对相位4进行分解,称为C_readd(1,4)。有detector(4)=C_req(2)+C_req(3)+C_req(4)+C_serv(4)。则系统在相位1周期完成后,由于detector(2)和detector(3)没有托肯,将跳过相位2和3,直接转向相位4提供服务。如图3所示,在相位j分解detector(i)的变迁称为c_readd(j, i)。用C_req(n,m)表示从C_req(n)到C_req(m)这几个库所。
4 结语
交通信号控制系统是交通物联网的一个组成部分,本文基于Petri网理论提出了开环结构的交通信号控制系统,通过安装在车道上的车辆检测器感知排队等候的车辆,进而反馈给交通信号控制系统。控制系统体系结构采用前端分布式控制,由各个路口的控制芯片自主控制,通过回馈的交通信号,灵活改变信号控制系统的相位順序,从而提高路口的道路使用率。
