基于AVR单片机的智能扫地机器人的设计
2017-06-10孔德平
孔德平
摘 要:扫地机器人主要由移动机构系统、感知系统、吸尘系统、控制系统、遥控系统五部分组成,通过这五大系统,可以实现室内的智能清扫工作的完成。在感知系统中运用到了分布于小车两侧的光电传感器,这样可有效把握好路径的选择并且能够很好的避开障碍;移动机构系统采用两个360度转动的伺服电机,这样在行走以及转向的情况下,可以最大做到精确;控制系统使用AVR单片机作为控制芯片;智能扫地机器人在行走过程中采用迂回前进,避开障碍的行走策略,同时可以接收无线遥控模块的指令,根据指令作出相应的反应。
关键词:扫地;机器人;智能
前言
智能扫地机器人是全自动或半自动机器,一定程度上代替了人工,解放了劳动力,并且节约了时间。扫地机器人包含了传感器技术,单片机控制技术,移动技术等,利用这些技术可以使机器人很好的实现自动避障,并且较为精确转弯和走直线,这样就可以解决扫地机器人一次全面清扫的功能。
1 智能扫地机器人结构设计
1.1 整体布局
机器人的结构主要由感知机构、移动机构、吸尘机构以及车体组成,机器人的前轮采用差动式驱动,后轮采用随动轮。基于机构和控制的复杂性,机器人使用圆形状结构,圆形状结构的最大优势就是控制起来简单,运动起来不易和障碍物发生碰撞。车体前端两侧采用两个光电传感器,这样就有四种组合方式,也就是有四种状态,这样就可以识别一切障碍物,不会有盲点。
1.2 移动机构
移动系统是由两个伺服电机以及相应的驱动组成,两个伺服电机分别带动两个后轮,而后轮则采用随动轮,这样就带动吸尘系统前行。后轮采用随动轮,而不是双轮,这样做可以很好的加强了小车转弯的灵活性。通过改变控制系统输出的pwm占空比,可对两个伺服电机实现较高精度的调速。对两个伺服电机输出相同频率不同占空比,电机的转速则不同,通过这样差速方式,实现吸尘器的前进,后退,左转弯,右转弯等功能。这样便可是使扫地机器人随意转弯.同时转弯的速度可以通过单片机的程序进行调节。
1.3 感知机构
感知机构由分布在机器人两侧的光电传感器组成。其采用光电元件作为检测元件,一般由光源、光学通路和光电元件三部分组成,光电传感器对机器人的位置进行探测,判断左右转弯是否可行。光电开关输出与障碍物位置间的关系如下:
左光电开关:0;右光电开关:0;障碍物位置:正前。
左光电开关:0;右光电开关:1;障碍物位置:左前。
左光电开关:1;右光电开关:0;障碍物位置:右前。
左光电开关:1;右光电开关:1;障碍物位置:未碰撞。
1.4 控制系统
我们采用Atmel公司的ATmega16單片机最小系统,AVR单片机功能强大,能够使得I/O口资源灵活,是一种处理能力极强的微控制器,同时提供许多控制系统的选择方案。
1.5 吸尘系统
吸尘系统采用小型吸尘器,主要由吸道,吸嘴,气泵和吸室组成。
吸尘原理:吸尘器的电机叶扇在电动机驱动下将电机中的空气排出,这样电机内部和外界就形成了一个气压差,于是外界的气体就会源源不断进入电机中。这样的话,尘埃等垃圾就会被吸入吸室内,吸室中有一个过滤器,将垃圾等留在吸室中,空气则排出吸室。
我们采用额定电压为12V的吸尘器,单片机的工作电压为5V,我们无法直接通过单片机控制吸尘器,这里使用一个继电器来间接控制吸尘器。
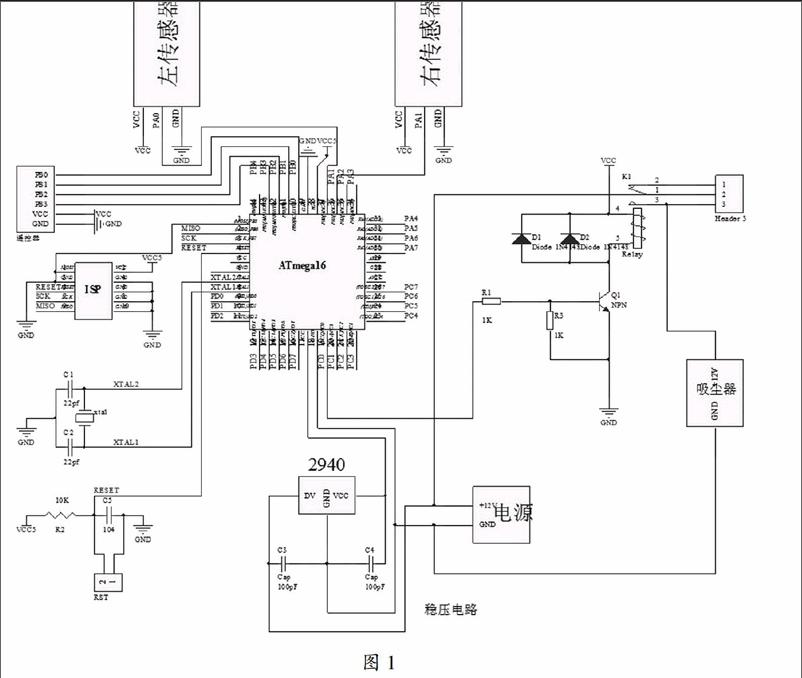
2 扫地机器人的硬件部分
硬件电路图主要有五部分,分别为AVR单片机最小系统部分、电源及稳压部分、感知结构部分、遥控模块和继电器控制电路。
完整的电路图如图1所示。
3 结束语
目前智能扫地机器人已经取得了很大的发展,但是还有很大的改进之处,比如传感器还有很大的进步空间,传感器是非常重要的一部分,只有更复杂,更精良的传感器才能满足人们各种复杂的需求,我们才能做出更高级的机器人。其实还可以使用更高级的技术,但是考虑到成本,我们不得不放弃选用。很多时候,因为产品依托于市场,即使市场对产品的需求量比较高,但其成本也很高时,也不见其销量会很好,或很受欢迎,因此,产品的开发还要根据实际的市场,不能随意做我们想做的东西,而忽略成本这个东西,而是需要多方面考虑才能进行开发。
