无刷伺服电机正弦驱动控制原理
2017-06-10张喆韩意新
张喆++韩意新

摘 要:对无刷伺服电机正弦驱动控制原理进行了介绍,首先介绍了电机磁场的合成原理,其次对逆变器状态进行了分析,最后对旋变位置传感器RDC转换原理进行了介绍。
关键词:电机磁场;无刷伺服电机;正弦驱动控制原理
1 电机磁场合成原理
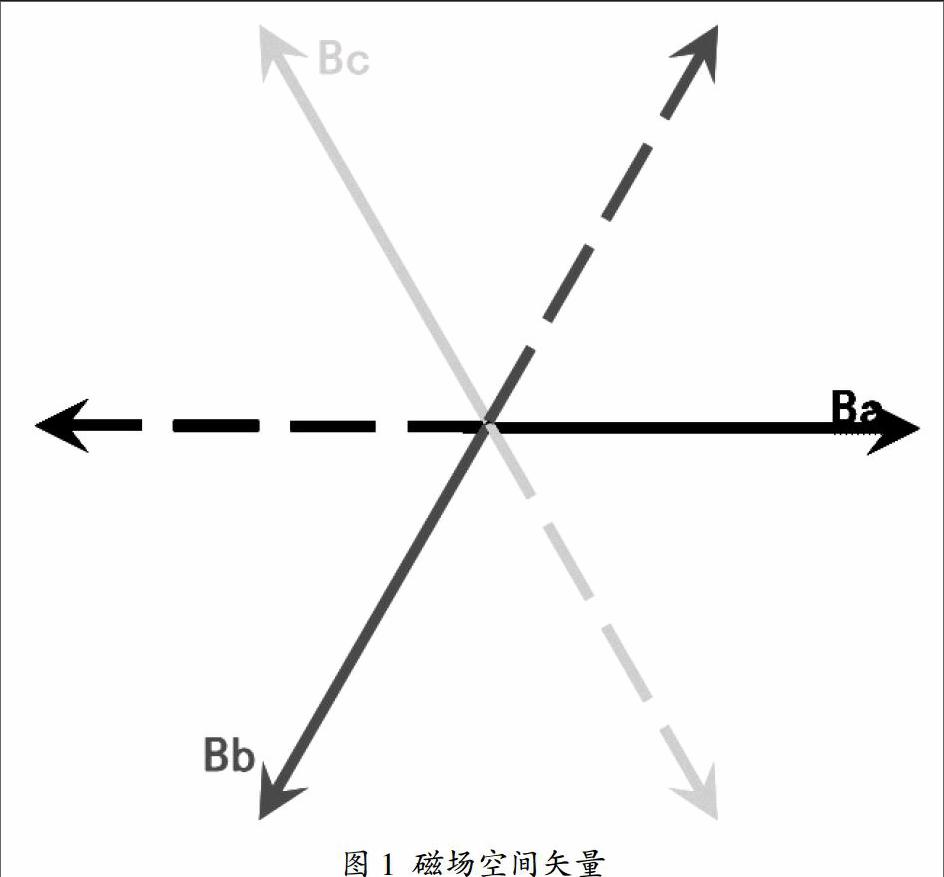
无刷电机三相绕组轴线在空间上互错120°电角度均布,各相绕组流过电流时均会产生绕组磁场,所产生的磁场中心线位置与其绕组轴线位置重合固定,磁场极性方向、大小由电流决定;若不考虑磁场饱和因素,则系统为线性系统,可采用叠加原理分析。如图1所示为一对极电机绕组磁场的磁感应强度空间矢量示意图。按电机理论,对确定的转子主磁场磁感应强度矢量方向,当绕组三相磁场合成的磁感应强度矢量方向与其夹角为90°电角度(正交)時,同样大小的转子主磁场和绕组合成磁场的相互作用将产生最大的转矩,对于永磁无刷机来说,当忽略电枢反应及温度的影响时,转子主磁场大小固定,绕组合成磁场的大小与绕组电流正相关(忽略磁场饱和时则成正比),也就是说,当正交时,可以达到该绕组电流所能产生的最大转矩。
从另一角度看,通电导体在磁场中受到的洛伦茨力,其大小为:
F=B*L*I*sin(θ)
式中:F为洛伦茨力,B为磁感应强度,L为导体的长度,I为电流,θ为导体与磁感应强度矢量间的夹角,对于固定的B、L、I,当θ为90°时将得到最大的F。
根据交流电机理论,在不计磁场饱和的情况下,若空间对称分布的三相绕组中通以时间上互错120°相位、角频率为ω的三相对称正弦波电流如右图2所示,则合成磁场为以角频率ω旋转的幅值固定磁场,也称圆形旋转磁场,磁场的旋转方向与三相绕组的机械安装位置次序及通电相序有关;可以看出,正弦波电流的角频率与转子机械旋转的角频率相等时,转子永磁体产生的主磁场和三相绕组电流合成的磁场(电枢磁场)均以角速度ω旋转,若它们的转向相同,则两个磁场相对静止。两个大小固定、相对静止的磁场之间相互作用将会产生恒定的作用力(转矩)。
2 逆变器状态分析
如图3所示,根据电力电子技术中有关PWM的理论,三相逆变桥的功率开关若使用三相对称正弦波与三角波的调制信号来驱动,以三角波的周期(斩波周期)为单位观察平均值,将会输出三相对称正弦波电压,施加于三相对称绕组时,由于电感的惯性作用,三相绕组中将流过对称正弦波电流,相位会略滞后于电压,也称为SPWM。事实上,SPWM电压除基波外还含有丰富的高次谐波(斩波频率及其倍频),但由于电感的滤波作用,三相电流中主要是基波电流,产生有效转矩;高次谐波电流产生的也是圆形旋转磁场,但其旋转角频率将按谐波倍数提高,转速高于转子主磁场旋转频率,其相互作用也会产生电磁转矩,但在转子旋转一周的时间内产生的平均电磁转矩为零,也就是说,高次谐波电流将会增加转矩波动和电机发热而对稳定的电磁转矩输出没有帮助。
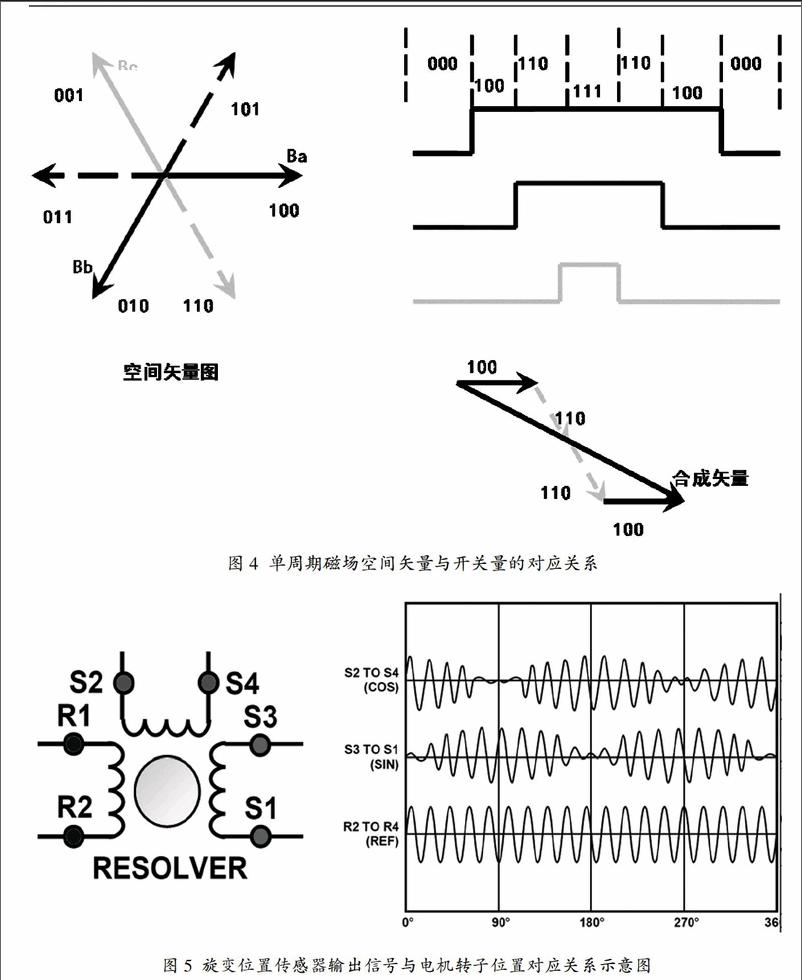
对于三相功率逆变桥,若为双极性工作,忽略死区,则每一相桥臂可以用一个比特来表示其工作状态,0为桥臂下管饱和导通、上管截止关断,电流流入绕组,产生正向磁场;1为桥臂上管饱和导通、下管截止关断,电流流出绕组,产生反向磁场;使用3位二进制数可以表达三相功率逆变桥的所有双极性工作状态,从左至右3位依次表示ABC的状态,共有23=8个状态,其中状态000和111分别将3相上管或3相下管全部打开,再考虑到功率开关均并联反向二极管,所以这两个状态相当于将绕组的3个接线端互相短路,施加了0V电压矢量;其余的6个状态按为1则产生实线方向磁场矢量,为0则产生虚线方向磁场矢量,将3相绕组的磁场矢量合成得到电枢磁场矢量与开关状态的对应关系如下图4所示,也称为开关矢量。
在1个SPWM(或空间矢量PWM)周期内,3相桥臂的状态中心对称,忽略000和111状态(0矢量),1个周期(约50微秒左右)内实际分4次输出了2个方向的空间矢量,如图4所示,考虑1个斩波周期内的平均合成矢量,其方向在输出的两个空间矢量之间,大小受两个空间矢量的大小影响,0矢量所占比例越大则输出合成矢量幅值越小。通过选择2个相邻输出矢量,可以在空间360°范围内输出指定方向的空间合成矢量,DSP输出的PWM分辨率一般高于12bit,一般认为空间矢量的合成方向及大小可以连续光滑调节,若能精确实时测量转子机械位置,则可以通过选择输出矢量及0矢量大小,始终保持合成磁场矢量与转子主磁场矢量正交,以获得最大转矩,同时减小转矩波动。
无刷伺服电机正弦驱动控制原理可以总结为实时精确测量转子磁场位置,始终保持输出的合成磁场矢量与转子磁场矢量正交,按控制策略调节合成磁场矢量的大小和正交次序(超前或滞后),调节电磁转矩大小和方向,最终实现电机伺服运动;在调节合成磁场矢量大小的过程中,考虑到磁场与绕组电流的正相关性,可以采用电流内闭环提高系统的响应性和转矩稳定性,但对电流传感器的精度和响应速度会有较高要求。在位置伺服系统中,还可以增加速度内环来提高系统响应速度,同样对速度传感器的精度和响应速度也会提出较高要求。
3 旋变位置传感器RDC转换原理
如图5所示,R1-R2为激励线圈,S1-S3为正弦绕组线圈,S2-S4为余弦绕组线圈,激励线圈固定在转子上,与无刷电机转子磁钢具有明确对应关系;正、余弦绕组固定在定子上,两个绕组轴线正交(一般与电机主磁场极对数相等),与电机定子绕组具有明确对应关系;激励线圈中通以固定频率和幅值的正弦波,当轴线与正弦绕组轴线正向重合或反向重合时(图中90°位置或270°位置),激励绕组与正弦绕组具有最大互感系数,此时与余弦绕组正交而互感系数为0,正弦绕组正向重合时输出信号与激励同相位(忽略铁磁材料磁滞、涡流效应及绕组电感、电阻导致的相位滞后),正弦绕组反向重合时输出信号与激励信号相位差180°,其他转子位置均示于图中。
激励绕组中的固定频率和幅值的单相正弦波信号实际上被转子位置所调制,在正余弦绕组中输出,旋变位置传感器模-数转换原理是将调制的正余弦信号解调,获得两个与转子位置密切相关的包络线,这才是真正的正余弦信号,在解调的同时将正余弦调制信号与激励信号的相位鉴别出来(鉴相),可以初步确定转子当前位置所在的区间,正余弦包络信号使用除法电路可以得到正切或余切信号,再将正余切信号用硬件电路求取反函数获得转子的位置角度信号,常用解算集成电路在此过程同时完成AD转换,输出转子位置编码。
可以看出,提高激励信号频率有助于提高解算电路的反应速度,但会使铁芯的磁滞涡流影响增大,对解算精度造成不利影响。
另外磁阻式旋转变压器的激励绕组虽然安装在定子上,但其信号特征与标准旋转变压器是一致的,只是信号精度一般低于标准旋转变压器,这里不再赘述。
4 结束语
无刷伺服电机在未来的工业领域有着广泛的应用,本文首先电机磁场的合成原理进行了描述,根据交流电机理论对磁场的作用力(转矩)进行了推导,其次对逆变器状态进行了分析,从而揭示了无刷伺服电机的正弦驱动控制原理,最后对旋变位置传感器RDC转换原理进行了介绍,对于系统的工程化研制具有指导意义。通过对无刷伺服电机正弦驱动控制原理的深刻理解,为今后的研制工作和使用奠定了坚实的理论基础。
参考文献
[1]王成元,夏加宽,杨俊友,等.电机现代控制技术[M].北京:机械工业出版社,2006.
[2]黄海宏,王海欣.多级永磁同步电动机的研究[J].电气应用,
2005,24(1):89-91.
[3]邵利,范瑜.盘式永磁同步电机建模及仿真[J].电机与控制学报,2006,10(2):171-174.
