玻璃壁面清洗机器人负压吸附系统的研究
2017-06-10程玉华袁艳芳潘越
程玉华+袁艳芳++潘越


摘 要:针对玻璃壁面清洗机器人风机噪声大和吸附稳定性问题,通过变形设计和实验研究方法,设计出适合玻璃壁面清洗的负压吸附系统,并分析了负压吸附原理,给出了与吸附系统相配合的最佳移动机构,并提出了低噪声离心风扇设计方法。实验表明所设计的负压吸附系统能满足玻璃壁面清洁与移动的基本需求,能够适应高层建筑玻璃清洗的复杂环境。
关键词:玻璃清洗;负压吸附;离心风扇;噪声污染
引言
壁面清洗机器人作为爬壁机器人的一种,主要在距离地面一定高度、人无法触及的建筑物竖直表面上进行工作,如高层建筑玻璃幕墙的清洗。本文结合负压吸附技术,针对低噪声离心风扇、最佳吸附力的选取等方面进行研究,设计的机器人样机能构适应高层建筑外壁面的工况环境。
1 壁面清洗机器人结构
图1为玻璃壁面清洗机器人整体结构。机器人由运动机构、离心风扇、无刷电机、负压腔、清洗装置构成,通过遥控器实现远距离无线通信。机器人接收到控制信号后,本体吸附在玻璃壁面并通过对角设置的运动机构实现移动与转向。在机器人移动期间,机器人底部安装的清洗抹布可以实现负压腔的密封和玻璃壁面的清洗两个功能。
1.运动机构;2.离心风扇;3.无刷电机;4.无线传输模块;5.玻璃壁面;6.清洗装置;7.负压腔;8.无线遥控器
图1 壁面清洗机器人机构示意图
1.1 运动轮接触应力分析
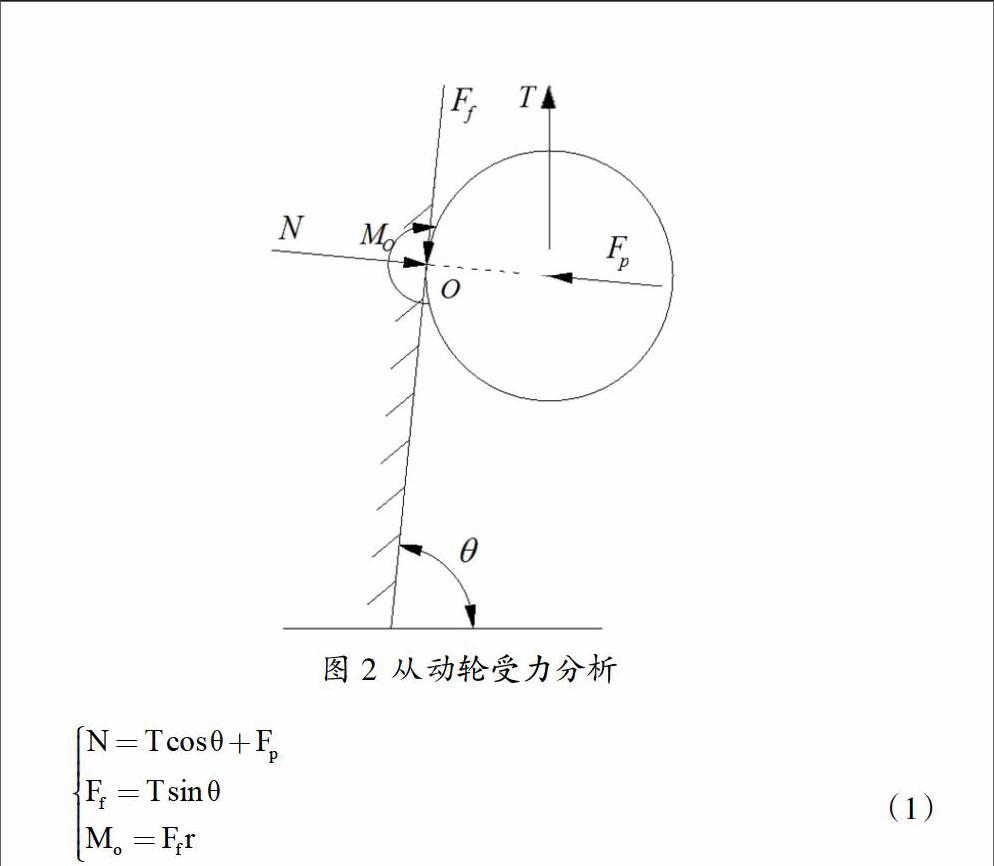
运动轮包含主动轮和被动轮,通过研究竖直玻璃壁面上主动轮和被动轮在滚动时表面的应力对运动的影响因素,确定运动机构构型和驱动方式。机器人通过运动轮在玻璃壁面移动,在运动轮表面会产生接触应力。在机器人静止时,运动轮产生的静摩擦力可以平衡机器人自身的重力;当机器人处于运动状态时,动摩擦力的运动方向与其运动性质有关。假设机器人与壁面刚性接触、壁面存在一定倾角,从动轮受力情况如图2所示。
当机器人在运动状态时,根据从动轮的受力平衡情况,机器人在壁面上不会发生倾覆,可以得出力矩平衡方程:
(1)
式中,N-壁面对从动轮的反作用力;Fp-机器人本体作用在轮轴上的正压力;Ff-壁面对从动轮的摩擦力;Mo-墙壁对从动轮的阻力矩;T-轮轴对从动轮的作用力;r-运动轮半径。
从动轮的动摩擦力方向与机器人运动方向相反,起阻碍运动的作用。机器人的吸附系统能够提供的最大吸附力为某一固定值,若机器人运动系统中存在从动轮,本质上浪费了一定的吸附力,离心风扇需要更高的转数来维持机器人在壁面不发生倾覆,增大了负压吸附系统的功率。因此本文中运动论的设计不采用从动轮的形式,只选取驱动轮。
1.2 运动机构设计
在实际情况下,玻璃表面可能沾满灰尘和污渍,运动机构既要保证机器人在竖直壁面灵活快速移动同时保证在壁面上安全吸附,这一技术难题是玻璃壁面清洗機器人研究的关键技术。运动机构如图3所示,运动轮采用摩擦系数大的软橡胶,两个轮子左右对角分布在机器人底盘两侧,由独立的减速电机控制。改变减速电机的转速可以实现机器人的前进、后退和转向。运动系统中没有采用被动轮,负压腔产生的吸附力垂直于壁面由外向内将机器人“推压”在玻璃壁面。一般来讲,吸附力与以下两种作用力的合力组成平衡力系:(1)主动轮支持力;(2)清洁抹布支持力。二者在数量关系上有以下关系:
图3 爬壁机器人运动机构三维图
Fa=FN1+FN2 (2)
式中,Fa-负压腔产生的吸附力;FN1-主动轮支持力;FN2-清洁抹布支持力。
为使机器人安全吸附在玻璃壁面上,需要用摩檫力去平衡机器人的重力。对角设置两个驱动轮有以下三方面的作用:(1)只有驱动轮而未设置从动轮可以提高负压腔吸附力的利用率;(2)增加了清
洁抹布与玻璃壁面的接触应力,有利于玻璃壁面上较脏污渍的擦拭;(3)减小了机器人的转向半径,增强了机器人的灵活性。
1.3 密封及清洁抹布设计
密封及清洁抹布如图4所示,安装在机器人底部,摩擦力适中、密封性能良好的密封系统,同时可以起到负压腔体的密封和玻璃壁面的擦拭两个作用。
一般说来,玻璃壁面较为光滑平坦,对于密封机构的气密性有较高要求,适合采用有正压力的密封机构。尽管正压力的存在,会抵消一部分吸附力降低吸附利用率,但是对于玻璃壁面清洗擦拭的场合,使用带有正压力的密封机构可以大大改善玻璃壁面的清洗效果同时降低空气泄漏量,从而减小吸附功耗。
图4 密封及清洁抹布设计
2 低噪声负压吸附系统的研究
应用于室内或室外环境的清洗机器人运动在具有一定高度的玻璃壁面上,离心风扇的气动噪声是清洗机器人噪声的主要来源。研究负压吸附系统中的关键部位——离心风扇,设计并选取适合低噪声负压吸附系统的离心风扇结构,同时对其各项结构参数进行优化设计,使负压吸附系统能够实现最大化的吸附力利用,从而在安全吸附的条件下降低风扇转数降低噪声的目的。
2.1 玻璃壁面清洗机器人吸附及噪声产生机理分析
图5负压吸附系统工作原理,根据伯努利原理:物体表面流体流速越大,则物体表面所受压力越小。离心风扇在电动机的带动下高速旋转,负压腔内的空气在高速旋转的同时经由负压腔裙边排出,这样就会在负压腔内形成一个瞬时真空。在竖直的玻璃壁面上,机器人本体内部表层因出现瞬时真空而受到的大气压力会降低,但是在机器人本体表面所受到的大气压力维持不变,综上分析,外部大气压会将机器人本体推压在玻璃壁面上。
图5 负压吸附系统工作原理
根据对机器人结构组成可以分析出,机器人本体的噪声主要来源于负压发生装置。负压发生装置包括离心风扇和无刷电机,径流式离心风扇相对于轴流式离心风扇能够为机器人提供更多的负压差;吸盘由裙边、吸盘腔体、进气分隔栏和密封及清洁抹布组成,裙边有利于气体的加压和排出,密封及清洁抹布可以防止吸盘腔体内的空气泄漏同时用作玻璃壁面的擦拭。
清洗机器人吸附在玻璃壁面上,吸附系统中的离心风扇的高速旋转会产生噪声。该噪声可分为两类:一类是气动噪声且占比最大,另一类是机械噪声影响较小。气动噪声产生的原因是离心风扇切割空气带动空气旋转而造成的,气动噪声也可以根据产生机理分为两类:一类是旋转噪声,另一类是涡流噪声。所谓旋转噪声是因为负压腔内离心风扇在切割空气时产生的相对运动而引起的壓力脉动造成的。查找资料可以得到旋转噪声的谐波频率:
fi=■i (3)
式中,fi-叶轮转速(rpm);z-叶片数;i-谐波次数,1,2,3…。
涡流噪声产生原理:负压腔中间部分是旋转的气流,气流逐渐向四周扩散到达负压腔内部的壁面附近时,运动的气流因为其固有的粘滞摩擦性与静止的壁面碰撞,产生一个又一个带有涡流的气团,这些涡旋不断生成又破灭,就会产生一种压强脉动,当这些现象极为剧烈时就会辐射出声音。该涡流噪声频率是:
fi=K■ (4)
式中,K-斯特劳哈尔数;V-气体与叶片的相对速度;D-气体入射方向的物体厚度。
2.2 低噪声离心风扇设计
分析旋转噪声和涡流噪声的频率公式可以知道,为了实现机器人低噪声运行目的,需要在保证机器人安全吸附的前提下,尽可能降低离心风扇的转数。因此,设计一种应用于玻璃壁面吸附的低噪声离心风扇,可以在不减少吸附力的前提下,降低噪声污染,对于整个玻璃壁面清洗机器人有重要的意义。图6离心风扇三维图。
离心风扇的旋转速度越高,清洗机器人本体产生的机械噪声和气动噪声就会越大,如何在维持吸附力不变的同时降低风扇转数就是本课题要解决的重点问题。本文选取离心风扇扇叶数为12个,叶片形式类似于飞机的机翼——叶片前段是圆弧状的加厚区域,这样设计有利于风扇扬程的增加。
图6 离心风扇三维图
3 结束语
玻璃壁面清洗机器人与一般的智能机器人不同,该种类机器人的工作环境特殊,一般是在距离地面几米甚至上百米的竖直墙壁外侧工作,这就要求机器人在运动的过程中实现安全吸附,尽量避免工作时发生掉落、死机、卡住等危险事故。本文结合运动系统设计、负压吸附技术,针对低噪声离心风扇、最佳吸附力的选取等方面进行研究。针对玻璃壁面清洗机器本体吸附系统吸附噪声大、结构复杂、负压维持率低等问题,通过变形设计和实验研究方法,对壁面清洗机器人本体结构进行设计,重点放在研究设计适合玻璃壁面清洗的负压吸附系统,进一步分析了负压吸附原理,给出了与吸附系统相配合的最佳移动机构,同时设计了一种适合吸附系统且结构简单的离心风扇。
参考文献
[1]彭晋民,李济泽,邵洁,等.负压爬壁机器人吸附系统研究[J].中国机械工程,2012(18):2160-2164+2168.
[2]朱志宏,李济泽,彭晋民,等.微小型壁面检测爬壁机器人移动平台研究[J].机械工程学报,2011(03):49-54.
[3]崔旭明,孙英飞,何富君.壁面爬行机器人研究与发展[J].科学技术与工程,2010(11):2672-2677.
[4]张兆君,颜宁,宗光华.壁面吊挂清洗机器人真空吸附力和牵引力设计研究[J].机器人,2005(01):57-62.
