智能小车双闭环模糊PID直流调速系统的设计
2017-06-10吕成龙李军红郭凤梅孙晓俞家傲
吕成龙+李军红++郭凤梅+孙晓++俞家傲++张进如
摘 要:智能小车要根据跑道状况随时调整速度,高速过弯时需差速调节,其对转速控制要求较高。单闭环PID直流调速系统动态响应差,抗干扰能力弱,常规的PID控制难以取得满意的效果。文章采用转速、电流双闭环控制結构,将模糊逻辑与PID控制结合应用于智能小车调速系统中,弥补了常规单闭环PID控制器的不足,加快了小车的动态响应,提高了系统的抗干扰能力。实验结果验证了文章提出的双闭环模糊PID直流调速控制算法的有效性。
关键词:模糊PID;双闭环直流调速;智能小车
1 概述
智能小车,也称轮式机器人。它具有对环境进行监测、自动追随引导线,并能根据环境进行自我调整等功能于一体的综合智能系统[1],有广泛的应用前景。目前智能小车速度控制系统大多采用PID单闭环控制,传统的PID单闭环调速系统虽然结构简单、易于实现,但动态响应差,抗干扰能力弱,传统PID控制效果主要取决于初始设置参数,不适合智能小车这一时变非线性系统,难以取得满意的控制效果。针对上述问题,本文采用转速、电流双闭环控制结构,将模糊逻辑与PID控制结合应用于智能小车调速系统中,弥补了传统的单闭环PID控制器的不足,加快了小车的动态响应,提高了系统的抗干扰能力。实验结果验证了本文提出的模糊PID双闭环直流调速控制算法的有效性。
2 智能车双闭环直流调速系统的组成
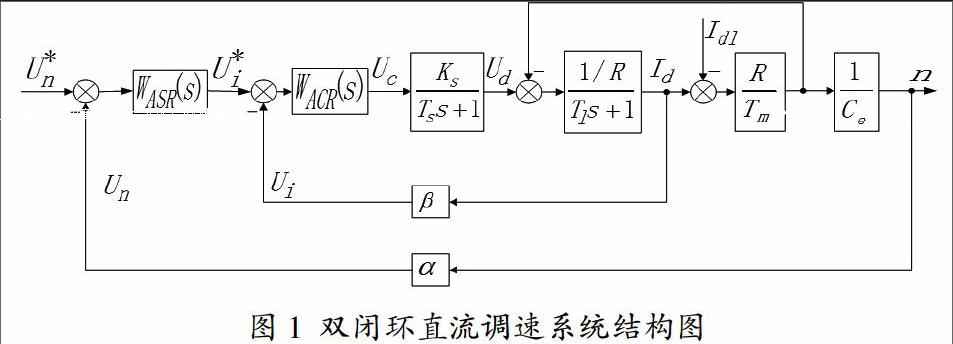
双闭环直流调速系统中有两个调节器,分别引入转速负反馈和电流负反馈以调节转速和电流,二者之间实行串级联接,电流负反馈为内环、转速反馈为外环,其结构如图1所示。
图1中:WASR(s)为转速调节器的传递函数;WACR(s)为电流调节器的传递函数;ɑ、β分别为转速、电流反馈系数;Ts为电力电子变换器的时间常数;Tl为电枢回路电磁时间常数;Tm为机电时间常数;Ce为电动机电动势常数;Ks为晶闸管装置放大系数;R为电枢回路总电阻。
转速调节器(ASR)的输出作为电流调节器(ACR)的给定,ACR的输出去调节电机的驱动电压,通过设置ASR的输出限幅值决定电动机允许的最大电流值,ACR在转速动态过程中,保证获得电动机允许的最大电流值,从而加快动态过程。
根据直流电动机双闭环调速系统的内部结构,考虑到转速环是决定控制系统性能优劣的主要因素,内环电流环主要起改变电动机运行特性,以利于外环控制。转速环采用模糊PID控制器,内环仍采用传统PID控制。通过电流、转速双闭环结构可以很好地抑制电源电压波动和负载变化等干扰对电动机转速的影响。
在本设计中智能小车电机驱动电路由BTN7971搭建的电桥构成,电流反馈由BTN7971的6脚串电阻引出,速度由欧姆龙公司的500线编码器采集,通过硬件正交解码,能反馈速度大小及转动方向。
ASR采用模糊PID控制器,ACR采用传统PID控制器,其传递函数均如式(1)。ASR的控制参数KP、KI、KD由模糊推理在线自整定。
3 模糊PID控制器的设计
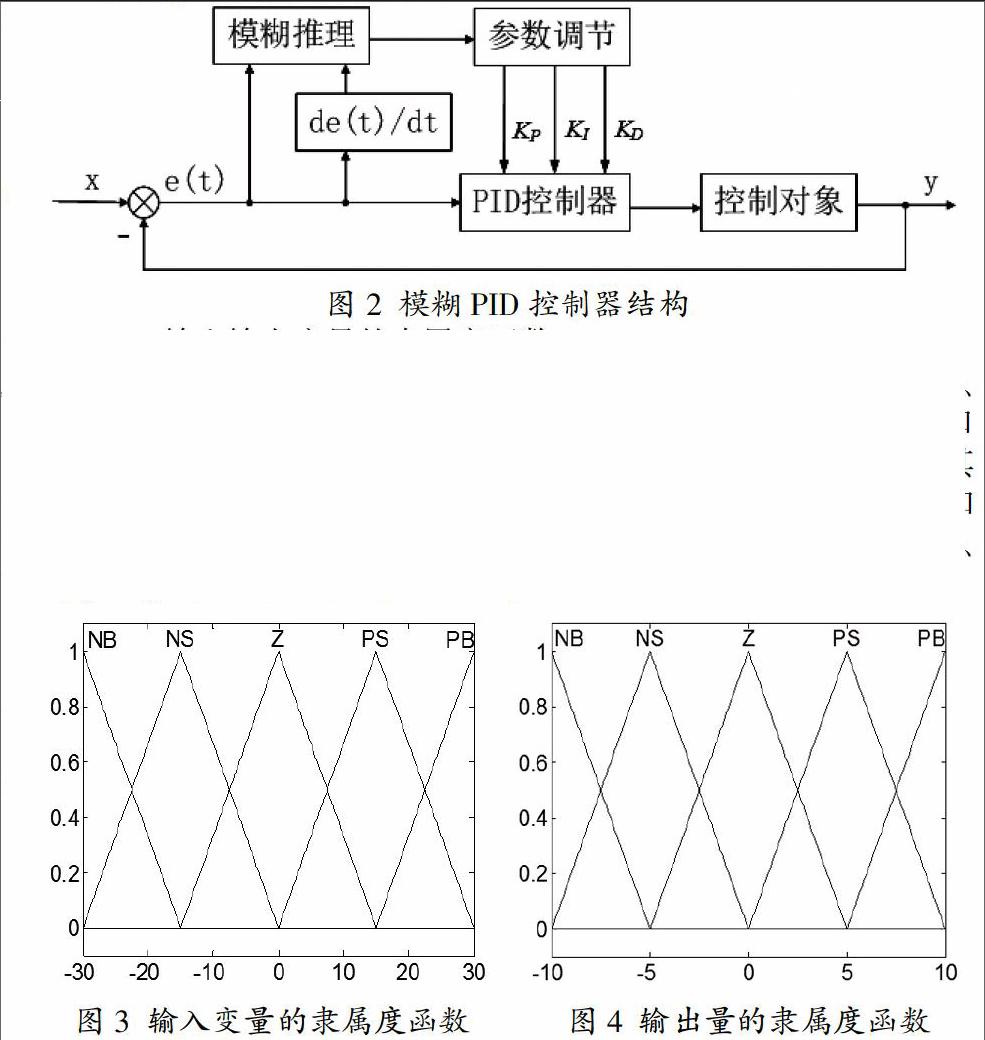
在实际智能小车系统中,由于电机本身的参数随温度、转速变化和拖动负载的时变等因素影响,智能车调速系统是一个复杂的非线性时变系统,采取传统的PID控制方法难以得到满意的效果[2]。本设计将模糊逻辑与PID控制结合应用于智能小车调速系统中,以速度误差e和误差变化率ec作为输入,用模糊推理的方法对PID的参数KP、KI、KD进行在线实时整定,以满足不同e和ec对PID控制器参数的要求,提高系统的动、静态性能,增强系统的鲁棒性。模糊PID控制器结构如图2所示。
3.1 输入输出变量的隶属度函数
以速度误差e和误差变化率ec作为模糊控制器的输入,ΔKP、ΔKI、ΔKD是输出变量,分别为PID控制器的比例系数、积分系数和微分系数的调节值。输入输出变量采取三角形隶属度函数,均在其论域内定义五个模糊子集{NB,NS,Z,PS,PB},输入量速度误差e和误差变化率ec取相同的隶属度函数如图3所示,输出变量ΔKP、ΔKI、ΔKD的隶属度函数如图4所示。
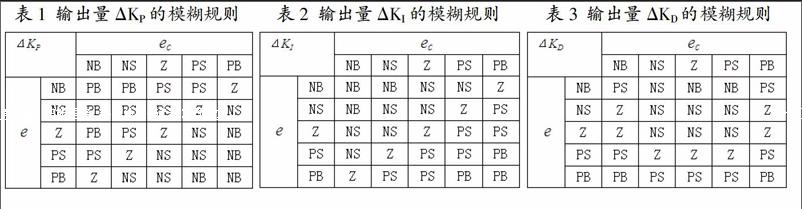
3.2 模糊规则
模糊控制规则采取“if A and B then C”形式,模糊PID有三个模糊规则库,分别对应参数ΔKP、ΔKI、ΔKD,通过MATLAB/SIMULINK进行仿真和调整,不断优化,最终确定由25条规则构成的模糊规则库,如表1-3所示。
3.3 模糊推理及解模糊
本文采用Mandani方法进行模糊推理[5],利用重心法解模糊得到ΔKP、ΔKI、ΔKD的精确值,PID控制器的参数调节根据式(2)确定。
(2)
其中KP0、KI0、KD0分别为PID控制器各参数的初始值,可以在直流电机空载情况下,运用试凑法确定一组最佳PID参数。
4 实验结果及分析
本文采用了全国“恩智浦杯”智能小车竞赛用的C车模对模糊PID控制器进行了实验,直流电动机参数如下:额定功率为PN=15.8W,额定转速为nN=1400r/min,额定电压为UN=7.2V。实验时给定参考转速为1000r/min,为了验证模糊PID控制器的抗干扰能力,在3s时,使负载转矩由原来的6N·m跳变至12N·m。系统分别采用常规单闭环PID控制器和本文提出的双闭环模糊PID控制器进行了实验,电机转速的阶跃响应曲线如图5所示。曲线1和曲线2分别为单闭环PID控制器和双闭环模糊PID控制器的响应曲线;比较曲线1和曲线2,容易看出采用本文提出的双闭环模糊PID控制器加快了智能小车的动态响应,提高了系统的抗干扰能力,性能明显优于常规的单闭环PID控制器。
5 结束语
本文介绍了智能小车模糊PID调速系统的设计方法,通过构建智能小车的双闭环直流调速系统,将模糊逻辑与PID控制结合应用于智能小车调速系统中,弥补了传统单闭环PID控制器的不足,加快了小车的动态响应,提高了系统的抗干扰能力。
参考文献
[1]张文杰.基于CAN总线的智能小车控制系统研制[D].成都:西南交通大学,2009:6-10.
[2]韩璐.直流电动机双闭环调速系统及其SIMULINK的仿真[J].船海工程,2003,2.
[3]叶金鑫.基于模糊PID的智能小车控制算法研究[J].实验科学与技术,2016(14):47.
[4]ABOU E E,BISHR M A.An emergency power system control based on the multi-stage fuzzy based procedure[J].Electric Power Systems Research,2007,77(5):421-429.
[5]李士勇.模糊控制·神经控制和智能控制论[M].哈尔滨:哈尔滨工业大学出版社,2003:66-71.
*通讯作者:李军红(1971-),男,汉族,湖南耒阳,硕士,副教授,主要从事电力电子技术、电机控制、智能控制及应用等方面研究工作。
