基于TMS320F28335的伺服系统数字化速度环设计
2017-06-10马蓓丽杨国文
马蓓丽+杨国文
摘 要:针对传统伺服系统模拟速度环难以实现高精度高性能的控制要求,文章设计并阐述了数字化速度环系统的结构原理与硬件实现。系统采用LTC1821芯片为数模转换(D/A)器件,以DSP芯片TMS320F28335为核心控制器,选用光纤陀螺仪作为速度反馈装置,搭建高精度速度环伺服跟踪平台。仿真实验证明,通过DSP软件设计与调试,运用增量式比例积分(PI)调节算法,该系统具有响应速度快,低超调和闭环精度高等优点。
关键词:伺服系统;速度环;D/A转换;PI算法
引言
作为伺服控制系统非常重要的组成部分,速度环要求具有高精度、快响应、强抗干扰性等良好的控制性能,以实现伺服系统快速准确的定位与跟踪。对于速度环伺服系统设计,其转速控制要求有两个方面:在给定的最高转速和最低转速的范围内,实现不同转速的调节;以一定的精度在所需转速上稳定运行,在各种可能的干扰下不允许有过大的转速波动[1]。
为实现高精度的数字化速度环设计,本文提出使用16位D/A转换芯片LTC1821为核心的速度环伺服跟踪系统,该芯片实现高精度数字量到模拟量的输出功能,具有高精度、低噪声、快速建立电压输出及强抗干扰特性,可完成控制需求;同时搭配使用数字信号处理器TMS320F28335为控制器[2],软件设计控制LTC1821,以实现系统高精度数字化功能。
1 伺服速度环系统框架
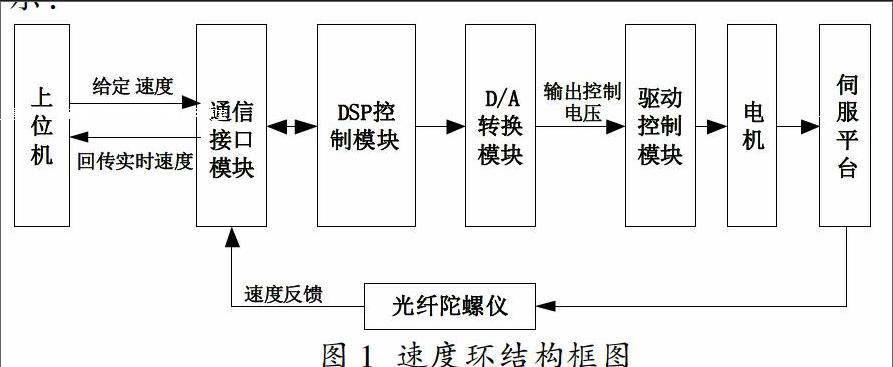
该系统硬件可分为DSP控制模块、D/A转换模块、驱动控制模块、通信接口模块和电源模块等组成。其结构框图[3]如图1所示:
本系统首先利用光纤陀螺仪作为速度反馈装置,DSP芯片内置的SCI模块可采集陀螺信号,提供转台的角度反馈数据,同时进行DSP软件算法搭建速度环PI控制器,实现系统的高精度速度闭环[4];其次D/A转换模块将DSP运算形成的数字信号控制量转换成模拟信号输出至驱动模块,实现电机的转速控制;最后为实现DSP芯片与外部设备的数据传输,通过通信接口模块实现通讯,DSP可接收给定速度命令,同时将当前实时速度值及各种故障状态回传,实现对整个系统的控制监控。
2 硬件设计
2.1 D/A转换模块
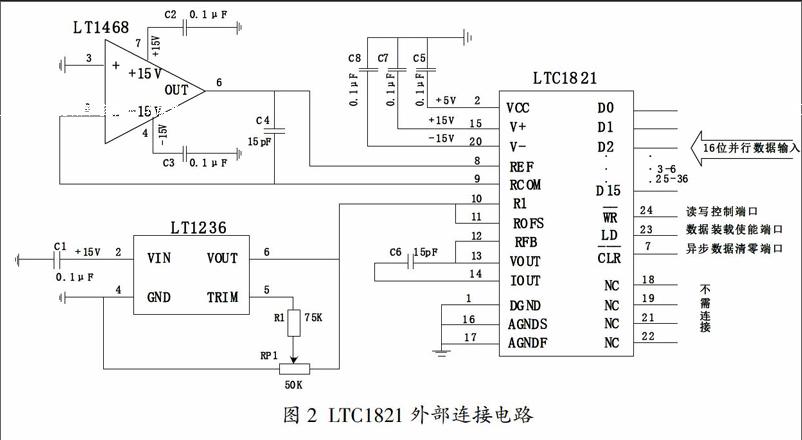
DAC芯片选用凌特公司生产的16位并行数字接口、高精度、快速建立的电压输出型数字模拟转换器LTC1821。LTC1821有两种工作模式,单极性输出模式0V至10V或者0V至-10V,和双极性输出模式-10V至10V;高精度特性,在整个工业温度范围内,其积分非线性和微分非线性不超过1LSB;具有超快速建立性能,在满度输出范围为10V时,LTC1821输出达到1LSB的时间小于2us;具有异步输入清零功能,引脚异步输入CLR置低电平时,LTC1821输出复位到零[5]。其外部连接电路应用如图2所示。
电路设计中,LTC1821工作在双极性工作模式,输出电压-10V至10V,选用芯片LT1236提供稳定的高精度基准电压10V;电容C6为芯片内部运放的反馈电容(单极性模式22pF,双极性模式15pF),用作频率补偿,减小内部电路产生的相移,避免产生自激震荡,以保持运放的稳定;RCOM引脚连接芯片内部的两个电阻的中间点,LT1468提供REF引脚驱动[6]。
2.2 DSP控制设计
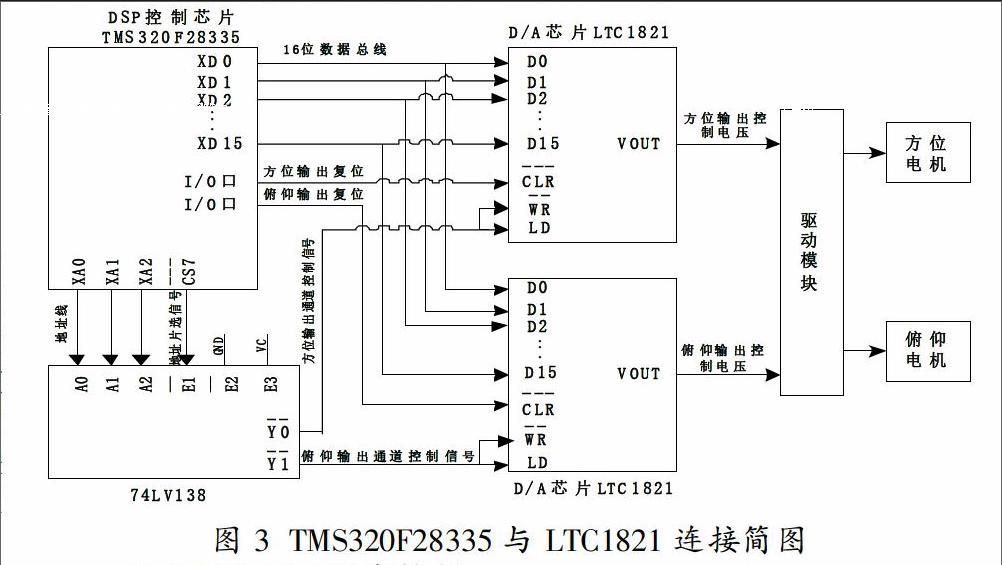
本系统使用的TI公司的TMS320F28335芯片是具有浮点运算单元的高性能数字信号处理器,片上资源丰富,可满足伺服系统更快更准的控制需求[7]。文中要求完成方位和俯仰两路速度的高精度控制,DSP控制芯片TMS320F28335与D/A转换芯片LTC1821之间的硬件连接设计[8]如图3所示。
2.2.1 LTC1821时序控制
LTC1821是具有配备输入寄存器和DAC寄存器两个16位寄存器的双缓冲结构。当引脚WR拉到低电平时,输入数据加载到LTC1821的输入寄存器;当引脚LD拉到高电平时,DAC寄存器被更新,进而DAC输出数据被更新。本文中,将引脚WR与LD短接,直接与74LV138的译码信号输出端,作为控制LTC1821的时序控制端口。在控制信号输出的下降沿,输入数据被写入LTC1821的输入寄存器,在上升沿DAC寄存器被更新。引脚CLR低电平时,LTC1821复位到0V输出[9]。
2.2.2 TMS320F28335与LTC1821间接口设计
系统中,将LTC1821的16位数据线D0-D15与DSP的XD0-XD15连接,实现16位并行数据输入;选用DSP的I/O端口控制LTC1821的CLR引脚,高电平时LTC1821处于正常工作模式下,拉至低电平则复位清零;LTC1821只可输出单路模拟电压值,要同时实现方位和俯仰双路电压控制,电路中需放置两个LTC1821芯片,通过TMS320F28335的地址线XA0、XA1和XA2和地址片选信号CS7,连接74LV138芯片进行地址译码,产生两路LTC1821的选通控制信号Y0和Y1[10];DSP程序编写中,可分配方位和俯仰数字控制电压的地址,当在两个地址分别写入方位或俯仰数据,引脚Y0或Y1变为低电平,对应的方位或俯仰LTC1821芯片输出相应的控制电压模拟量[11]。其时序设计示意图如图4所示。
3 软件设计实现
根据PI控制原理,比例增益系数P会对系统的精确度和刚性有影响,比例增益越大,系统的响应速度越快,但会带来超调和震荡,而积分增益系数I则可消除系统存在的稳态误差,提高系统的闭环精度。PI算法分位置式和增量式两种,本系统软件设计中采用增量式PI控制算法。两者相比,位置式PI算法输出直接對应对象的输出,对系统影响较大,而增量式PI算法输出的是控制量的增量,若系统出现故障,误动作影响较小;位置式PI算法的控制输出与整个过去的状态有关,使用的是误差的累加值,而增量式PI算法,只与当前时刻和上一时刻的误差有关,其累积误差相对更小[12][13]。
3.1 增量式PI算法
系统中,设ierror(k)为第k次采样时刻的速度误差值,Sumierror(k)为前k次采样时刻的速度误差累加和,Kp为比例系數,Ki为积分系数,U(k)为在第k-1次采样时刻输出控制量,则该系统的位置式PI算法表达式为:
U(k)=Kp*ierror(k)+Ki*Sumierror(k)
=Kp*ierror(k)+Ki*?撞■■ierror(i) (1)
其中,k为采样序号,k=0,1,2,…;ierror(k)为系统在第k次采样时刻的误差值,ierror(k-1)为在第k-1次采样时刻的误差值。
递推出第k-1次采样时刻输出控制量,表达为:
U(k-1)=Kp*ierror(k-1)+Ki*?撞■■ierror(i) (2)
两式相减可得:
U(k)-u(k-1)=Kp*[ierror(k)-ierror(k-1)]+Ki*ierror(k) (3)
即可得增量式PI算法的表达公式:
U(k)=u(k-1)+Kp*[ierror(k)-ierror(k-1)]+Ki*ierror(k) (4)
由上式可看出增量式PI控制的输出计算,只与当前时刻和上一时刻的误差有关,与位置式PI算法相比,其累积误差相对较小,软件设计时运算量相对较小;另外,其输出的是控制量增量,闭环响应速度更快,精度更高[14]。
3.2 软件实现
本速度环系统的增量式PI控制器软件设计中[15][16],设定控制周期1ms,计算速度误差ierror(k),即系统当前速度与目标速度的差值:
ierror(k)=Vo(k)-Vb(k) (5)
式中,Vo(k)为第k次采样时刻的系统给定目标速度,Vb(k)为当前系统实测速度。利用公式(4),经过PI算法形成控制信号的数字量,送给D/A输出模拟控制量完成一个控制过程,其软件流程图如图5。
4 仿真结果与分析
以本文设计的系统平台进行实验并仿真,选取合适的P和I参数,由上位机发送目标速度指令,使伺服转台由当前速度快速响应至目标速度并稳定闭环。实验波形曲线如图6和图7所示,图6为速度响应曲线与目标速度6000的对比图,图7为误差曲线。
仿真结果显示,系统PI算法速度响应的峰值时间约25ms,调节时间约50ms,超调量可控制在15%以下,速度稳定后的闭环精度可达0.1%。实验结果显示,该系统在增量式PI的软件算法下,可快速稳定的实现速度闭环,具有比较理想的控制效果。
5 结束语
本文介绍了基于LTC1821的数字化速度环系统,以处理器TMS320F28335与DAC芯片LTC1821进行了硬件设计,同时通过DSP内部软件编程完成增量式PI算法。试验证明该系统可实现高精度快速准确的速度闭环,以及一定转速范围内不同转速的调节。
参考文献
[1]任润柏,周荔丹,姚钢.TMS320F28X源码解读[M].北京:电子工业出版社,2010.
[2]陈光伟,向中凡.基于TMS320F2812的最小系统设计[J].微型机与应用,2010,29(12):49-51.
[3]陈永刚,阎秋生.基于速度环增益调度PI算法的直线电机控制系统设计[J].制造业自动化,2013,35(6):107-113.
[4]陈伯时.电力拖动自动控制系统-运动控制系统[M].北京:机械工业出版社,2010.
[5]乔敏娟,韩文波,刘莹莹,等.基于DSP的无刷直流电机闭环控制系统的设计[J].计算机与现代化,2014,221(1):206-210.
[6]韦宏利,李金荣.基于LS052A-Cb的无刷直流电机的控制系统设计[J].机械与电子,2016,34(2):68-71.
[7]韩海云,刘军,秦海鸿,等.永磁同步电机伺服系统速度环优化设计[J].现代雷达,2013,35(1):63-67.
[8]白云,郭阳宽,祝连庆,等.基于DSP的无刷直流电机速度环控制系统设计[J].电子产品世界,2013,20(1):34-36.
[9]杨金宝,杨桦,王楠,等.数控变速调焦控制电路的设计[J].光电技术应用,2014,29(1):68-70,79.
[10]李红卫,刘昊,李勇臻.基于TMS320F28335的雷达伺服系统的设计与实现[J].电子设计工程,2013,21(1):170-172,176.
[11]许炜,余晓华,阙宇潇.基于TB6551FG正弦波驱动的无刷直流电机控制系统研究[J].机电信息,2013(73):61-63.
[12]丛爽,魏学云,邓科,等.陀螺稳定平台速度环的离散模型参考自适应控制[J].信息与控制,2014,43(3):287-292.
[13]韩海云,刘军,秦海鸿,等.永磁同步电机伺服系统速度环优化设计[J].现代雷达,2013,35(1):63-67.
[14]徐晓霞.机载光电跟踪系统的模糊PID控制[J].电子设计工程,2012,20(2):108-111.
[15]杨鹏,王飞,贾春奇,等.无刷直流电机闭环控制仿真系统的研究[J].微电机,2013,46(11):76-78.
[16]赵正黎,于惠钧,张发明,等.基于模糊PID控制的直流电机调速系统[J].湖南工业大学学报,2015,29(2):38-43.
作者简介:马蓓丽(1985-),女,河南省辉县市,硕士,工程师,研究方向:伺服系统软件控制设计。
