双无人机跟踪飞行系统的设计
2017-06-02李勇庆潘磊王琛戴铮李灿
李勇庆 潘磊 王琛 戴铮 李灿
摘要:随着无人机技术的大力发展,单架无人机已能完成很多任务。在执行复杂任务的性能和效率方面多机系统比单机高出许多,为了能够更好地研究无人机集群控制,本项目从双无人机系统入手研究无人机的集群控制。在本项目中将设计两架四旋翼无人机的跟踪飞行系统,其中一架四旋翼无人机作为领航,通过二者之间的互相通信,采用协同控制达到另一架无人机跟踪领航无人机飞行的目的。
关键词:四旋翼无人机;跟踪飞行;协同控制;集群控制
中图分类号:V216.8 文献标识码:A 文章编号:1007-9416(2017)04-0190-03
1 引言
四旋翼无人机,是一个简单的十字形的飞行器,因其操作简单、实际运用能力强,特别适用于侦察、搜寻、探测等空中作业,在军事和民用领域运用广泛。单机四旋翼无人机目前已经发展得较为完善,但在执行复杂任务的时候总体性能不如多机协同工作。通过多机协同控制,四旋翼无人机集群飞行在复杂任务中作用突出,多机系统的总体性能、效率比单机高。
为探索多无人机协同工作的理论与实现机理,国外以及开展了大量的相关研究项目。其中具有代表性的是美国国防部高级研究计划局(DARPA)牵头的自治编队混合主动控制项目(Mixed Initiative Control of Automata-teams,MICA)[1-3]、广域搜索弹药项目(Wide Area Search Munitions,WASM)[4-6]和欧洲信息社会技术计划(Information Society Technologies,IST)资助的异构无人机群实时协同与控制项目(Real-time Coordination and Control of Multiple Heterogeneous UAVs,COMENTS)[7-10]等。除此之外,一些国外高等院校也开始参与到多无人机编队以及一致性控制等方面的研究:麻省理工、加州理工等三所高校一起合作完成了分布式协同控制项目,其中涉及到多无人机路径规划、编队控制等[11]。
相对于国外,国内对多智能体协同控制的研究比较晚,但也取得了丰硕的成果。比如北京理工大学邓启波[12]等人针对复杂的无人机协同飞行问题,考虑无人机的资源有限性、多任务间时序约束等,以图论和组合优化理论为主要数学工具,建立多无人机协同任务规划问题的数学模型。哈尔滨工业大学刘书林[13]等人提出基于超橢圆方程位置约束,利用位置误差和同步控制算法来实现对四旋翼无人机的编队控制,并结合欧拉-拉格朗日动态方程设计出控制力拒;西北工业大学的朱旭[14]等人提出了基于一致性理论的多无人机编队队形保持算法,建立了多无人机编队通信拓扑结构,并基于此提出多无人机集结、解散以及队形变换策略。
本文在飞行器集群控制相关技术研究以及阅读相关理论知识的基础上,设计了一个双无人机协同控制飞行的方法。
2 四旋翼无人机飞行原理及构建
2.1 四旋翼无人机飞行原理
四旋翼无人机通过调节四个电机的转速去控制四个旋翼,进而实现升力的变化。根据四个电机所控制的相对应的旋翼产生不同的升力的同时去调节四旋翼无人机的飞行姿态以及高度。由于位于两条对角线上的电机旋转方向不同,因此当无人机平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。根据四旋翼无人机上四个电机转速的不同可以完成垂直运动、前后运动以及偏航运动。
2.2 四旋翼无人机硬件电路设计
2.2.1 四旋翼无人机基础硬件构建
四旋翼无人机的主要硬件部件有:无刷电机,电子调速器,螺旋桨(两个正桨,两个反桨),机架以及飞行控制芯片。四个相同直径的螺旋桨对称分布在机体的四个机体支架端。通过飞行控制芯片控制电子调速器进而控制电机,电机控制对应的螺旋桨,达到控制无人机姿势以及高度的目的。
2.2.2 主控芯片
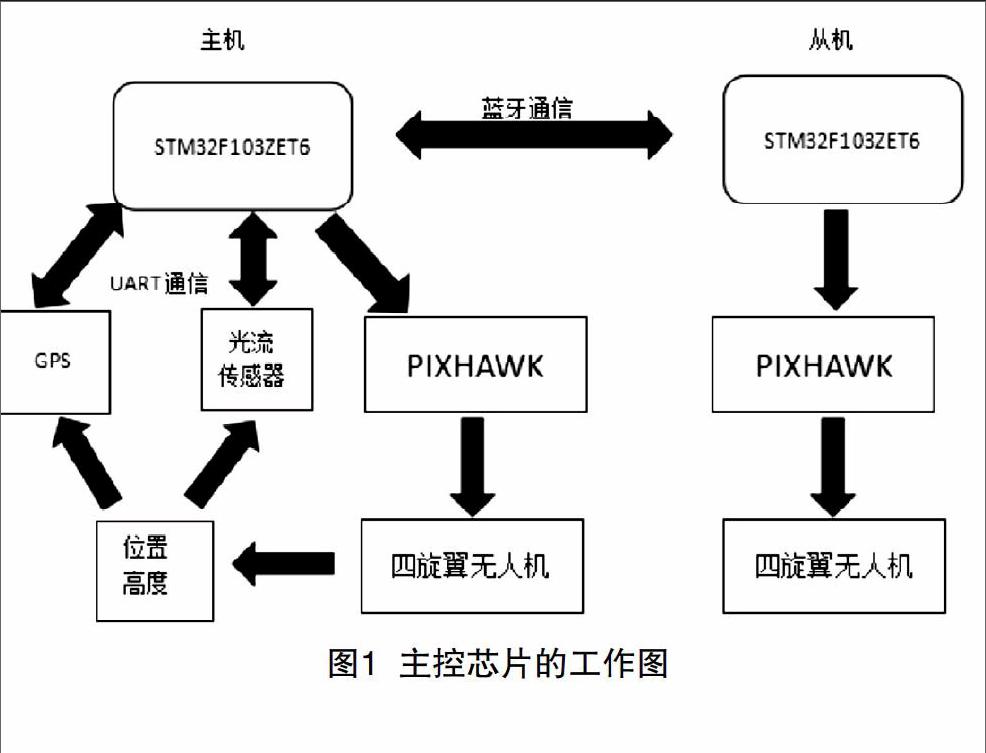
本设计采用STM32F103ZET6作为主控芯片,其作用有三。一,控制飞控芯片来调整四旋翼无人机的飞行姿态以及位置高度。二,控制GPS定位以及光流传感器,对两者采集到的位置信息进行解读。三,通过UART进行光流传感器、GPS与单片机间的通信,通过蓝牙进行两台无人机上的单片机之间的通信。STM32F103ZET6单片机控制PIXHAWK进行四旋翼无人机飞行姿态及高度位置的调整,利用GPS与光流传感器对主机的位置高度进行采集,采集的信息送回STM32F103ZET6单片机。单片机再将主机的位置信息报给从机,控制从机的飞行状态,进而达到主机控制从机协同飞行的目的。主控芯片的工作图如图1所示。
2.2.3 飞控芯片
PIXHAWK是一个双处理器的飞行控制器,拥有32bit ST32F427 CORTEX M4核心,168MHz/256KB RAM 以及2MB Flash处理器,并配备有32bit STM32F103的协处理器用来保障安全,14路PWM输出。在飞翼模式中,可以使用飞行备份系统,存储飞行状态等数据,进行高速数据记录。PIXHAWK的传感器16bit陀螺芯片、14bit加速度/磁场芯片以及气压芯片,支持数字差压传感器作为空速传感器。所有的外设输出带有功率保护,所有的输入带有静电保护。综合考虑下,PIXHAWK飞行控制芯片符合本设计需要的的硬件条件。
2.2.4 GPS定位
GPS具有全方位、全天候、全时段、高精度的卫星导航系统,能为四旋翼无人机提供高精度的三维位置、速度,且抗干扰能力强,适合室内外四旋翼无人机的定位导航。
2.2.5 光流传感定位
光流是一种简单实用的图像运动的表达方式,通常定义为一个图像序列中的图像亮度模式的表观运动,这种定义认为光流只表示一种几何变化。1998年Negahdaripour将光流重新定义为动态图像的几何变化和辐射度变化的全面表示[15]。光流传感器能对视觉运动进行测量并输出二维测量值,近年来,使用光流传感器进行无人机导航和避障一直是个热点问题。光流传感器通过IAS以一定速率连续采集物体表面图像,再由DSP对所产生的图像数字矩阵进行分析。由于相邻的两幅图像总会存在相同的特征,通过对比这些特征点的位置变化信息,便可以判断出物体表面特征的平均运动,这个分析结果最终被转换为二维的坐标偏移量,并以像素数形式存储在特定的寄存器中,实现对运动物体的检测。利用光流传感器,我们可以从光流场中近似得到不能直接得到的运动场。本设计结合GPS定位系统与光流传感器定位,更加精准地获得四旋翼无人机的位置以及高度信息。
3 四旋翼无人机软件设计
3.1 UART通信模塊
UART:通用异步收发传输器,是一种异步收发传输器,可以实现全双工传输和接收。考虑到传输效率以及准确度,本设计采用为八位数据位,并设置奇偶校验位,以此来校验数据传输的正确性,设置的波特率为115200字符/秒。UART通信模块用于GPS、光流传感器与STM32F103ZET6单片机之间的通信,将GPS、光流传感器采集到的位置信息传送给单片机。
3.2 蓝牙通信模块
蓝牙无线技术采用的是一种拓展窄带信号频谱的数字编码技术,通过编码运算增加发送比特的数量,扩大带宽。蓝牙使用跳频方式来拓展频谱,跳频扩频使得带宽上信号的频谱密度降低,大大提高系统抗干扰能力,使得数据传输更加可靠。蓝牙采用时分双工传输方案,使用一个天线利用不同的时间间隔发送和接收信号,且在发送和接收信息中通过不断改变传输方向来共用一个信道,实现全双工传输。蓝牙无线技术是一种短距离通信系统,能在移动中进行无线连接和通信,支持无线设备到有线网络之间的无线连接,只要连接到局域网的蓝牙接入点,就可以实现有线局域网的无线数据连接。利用蓝牙无线技术功耗低,支持无线连接和通信的优点,双无人机能够进行良好的通信,主机将位置信息以及四个电机的速度信息发送给从机,进而实现从机自主达到飞行动作的目的。
4 无人机协同控制
双四旋翼无人机协同飞行,利用一架主机进行领航飞行,从机进行跟随飞行,当获取了主机的位置、方向角以及电机速度,即获知了主机的飞行状态。控制从机与主机之间的水平距离、方向角以及电机速度便可以达到双四旋翼无人机的协同飞行目的。无人机的方向角由四个电机不同的速度而产生,所以将问题进一步简化成获取主机的位置以及四个电机的速度。
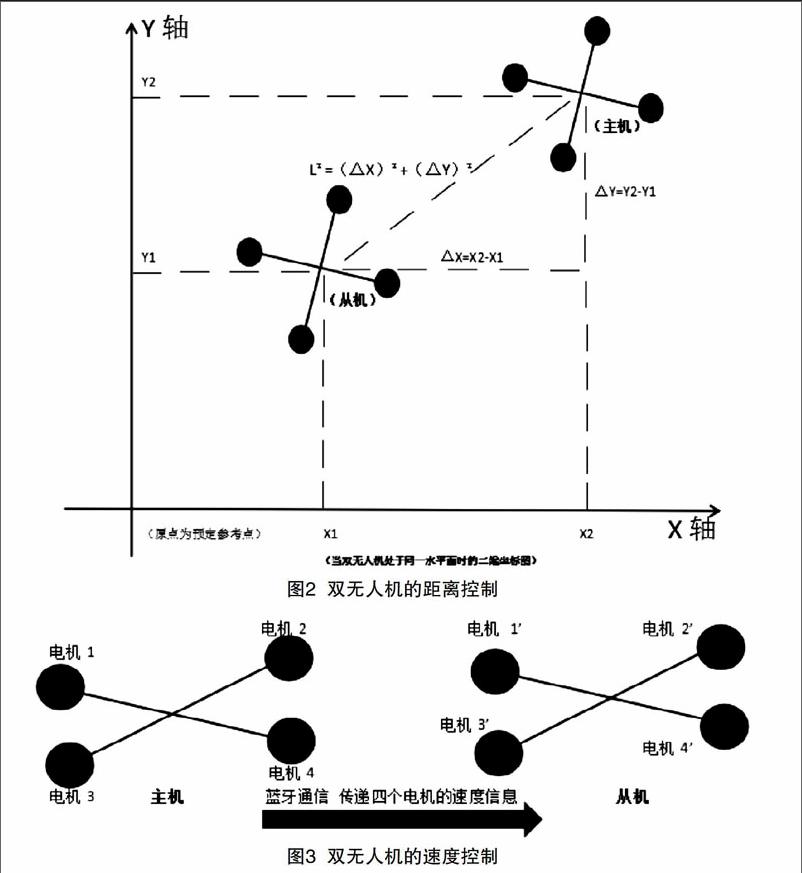
为了做到双无人机的距离控制,双无人机的距离控制如图2所示,X2、Y2为主机的二维平面坐标位置,X1Y1为从机的二维平面坐标图,L为主机与从机的绝对位置差。当控制双四旋翼无人机处于同一飞行水平面时,主机通过GPS、光流传感器获取自身的动态位置信息,将位置信息通过蓝牙通信将主机的动态位置信息实时发送给从机,从机在接收到主机的动态位置信息后,在保证绝对位置差L不变的前提下,通过STM32F103ZET6单片机将所获取的位置信息进行相应的更改,操作飞行控制芯片PIXHAWK,将从机的飞行位置进行相应的改变,达到双无人机的距离控制。
为了达到双无人机的方向角以及电机速度的一致,通过蓝牙通信模块将主机四个电机的速度信息发送给从机,进而达到双无人机电机的速度控制。主机四个电机的速度信息一一对应于从机的四个电机,掌握了四个电机的速度信息也便掌握了机身的方向角,即飞行姿态。双无人机的速度控制如图3所示。
5 结语
本文设计并初步实现了双无人机跟踪飞行系统,该系统相比其他的集群控制算法,协同控制具有原理较简单,可行性高等特点。可为日后研制多无人机协同控制打下一定的基础。本设计由无人机基础构造、无人机通信、无人机协同控制三部分组成。本课题主要进行了如下工作:分析双四旋翼无人机相互通信方法以及分析无人机定位的方式手段并且分析该多无人机协同控制的可行性。
综上所述,本文设计的双无人机跟踪飞行系统,具有可行性强、可靠性的特点,具有实现双无人机快速响应,协同飞行的的能力,为日后研究发展多无人机集群控制打下基础。
参考文献
[1]Jerry W.,Asif K.,David C., et al. Stochastic, Hierarchical, Adaptive, Real-time Control (SHARC)of Automa-Teams for Tactical Military Operations[C]. 1st UAV Conference. 2002. AmericanInstitute of Aeronautics and Astronautics. AIAA 2002-3453.
[2]Michael O. Mixed Initiative Control of Automa-teams (MICA)一a Progress Report[C]. AIAA 3rd"Unmanned Unlimited" Technical Conference, Workshop and Exhibit. 2005. American Instituteof Aeronautics and Astronautics. AIAA 2004-6483.
[3]Adams M. B.,Lepanto J. A., Hanson M. L. Mixed Initiative Command and Control ofAutonomous Air Vehicles[J].Journal of Aerospace Computing, Information, and Communication, 2005, 2 (2): 125一153.
[4]Schumacher C.,Chandler P. R.,Rasmussen S. R. Task allocation for wide area search munitionsvia network flow optimization[C]. AIAA Guidance, Navigation, and Control Conference.Montreal, Canada, 2001. AIAA 2001-4147.
[5]Schumacher C.,Chandler P. R.,Rasmussen S. R. Task Allocation for Wide Area SearchMunitions via Iterative Network Flow[C]. AIAA Guidance, Navigation, and Control Conference. Monterey, California, USA, 2002. AIAA 2002-4586.
[6]Warfield L.,Carretta T. R.,Patzek M. J., et al. Comparing Manual and Cooperative ControlMission Management Methods for Wide Area Search Munitions[R].2009.
[7]Ollero A.,Maza I. Multiple Heterogeneous Unmanned Aerial Vehicles[M]. Berlin Heidelberg:Springer, 2007.
[8]Ollero A.,Lacroix S.,Merino L., et al. Multiple Eyes in the Skies: Architecture and PerceptionIssues in the COMETS Unmanned Air Vehicles Project[J]. Robotics&Automation Magazine, IEEE, 2005, 12 (2): 46-57.
[9]Merino L.,Caballero F.,Martinez-De Dios J. R., et al. Cooperative Fire Detection usingUnmanned Aerial Vehicles[C]. Proceedings of the 2005 IEEE International Conference onRobotics and Automation. 2005: 1884一1889.
[10]COMETS Project web site[EB/OL]. [2014-2-6]. http://www.comets-uavs.org/.
[11]Kim J. Accurate Modeling and Robust Hovering Control for a Quad -rotor VTOL Aircraft[J]. Intelligent and Robotic Systems, 2010, 57(4):9-26.
[12]鄧启波.多无人机协同任务规划技术研究[M].北京:北京理工大学,2014.
[13]刘书林.四旋翼无人机编队飞行的控制策略研究[M].哈尔滨:哈尔滨工业大学,2016.
[14]朱旭.基于信息一致性的多无人机编队控制方法研究[M].西安:西北工业大学,2014.
[15]Negahdaripour, S.(1998). "Revised definition of optical flow: Integration of radiometric and geometric cues for dynamic scene analysis." Pattern Analysis and Machine Intelligence, IEEE Transactions on 20(9):961-979.