码头可视化智能管控系统
2017-06-02李静
李静
摘要:为确保码头生产作业的安全性和管理效益的提高,针对码头的作业操作部门,提供智能化的管控手段;利用GNSS卫星定位和UWB无线定位技术结合GIS系统实现各类作业机械的准确定位与状态的显示,并通过PLC的控制实现大机的实时作业安全监控及大机间的安全防撞预警,以便合理调度、规避危险和事故的发生。
关键词:GNSS卫星定位;UWB无线定位;GIS系统;跑垛分系统;GPS移动站
中图分类号:TP315 文献标识码:A 文章编号:1007-9416(2017)04-0018-02
码头生产作业对安全性要求较高,因此经常需要对大型设备进行实时位置的追踪和定位。传统的监测方法,主要有位置编码器定位或GPS定位,可是这些方法各有不同的局限性。采用位置编码器定位,往往响应延迟和累积误差都较大。而采用GPS定位,往往存在米级误差,并且无法解决封闭料仓的定位问题。
为了提高港区码头的作业效率、节约生产成本、降低生产事故和工人的劳动强度,并进一步提升码头的信息化水平和可视化管理水平,本文以GNSS技术及UWB技术等智能定位应用系统,结合PLC控制系统,实现对作业机械和场地垛位的可视化智能管控。
1 系统功能
本系统引入卫星导航应用技术及超宽频无线定位技术等智能定位应用系统,实现对作业机械的可视化监控和智能化调度。作业机械与场地垛位的准确定位,以及作业过程的实时监控,通过与生产管理系统的实时无缝连接,实现调度与机械司机作业指令的实时传递,从而实现作业效率的实时分析,有效提高码头作业效率;同时实现作业量的自动统计,避免人为因素干扰,大大提高了码头堆场的智能化管理水平。大机上安装高精度定位测姿系统,有效检测大机的作业位置与大臂斗轮的位置,通过PLC的控制实现大机的实时作业安全监控及大机间的安全防撞,显著提升了码头生产作业的安全性,规避生产事故发生的风险。
2 系统概述
本系统利用卫星定位技术(GNSS)、超宽频无线定位技术(UWB)、与地理信息系统(GIS)、以及无线通讯技术,在原有的生产管理系统基础上,建立码头可视化智能管控系统。
本系统堆取料机定位与安全控制依靠GNSS高精度双频定位测向和实时的RTK差分数据,GIS系统计算出堆取料机机身和悬臂顶端当前的实时高精度位置,大机的控制中心提供接口将大机的位置信息与安全控制信息发送给PLC系统,实现大机的位置与可视化展示和自动安全控制。
针对封闭料仓内无法使用GPS等卫星导航应用产品,且RFID、WIFI等定位手段无法达到厘米级定位精度的要求,所以本系统采用UWB定位技术。通过系统对堆取料机上安装的定位标签的位置检测,实现对堆取料机的定位,将堆取料机的位置与姿态信息接入PLC控制系统,实现堆取料机的安全自动控制。
3 系统组成
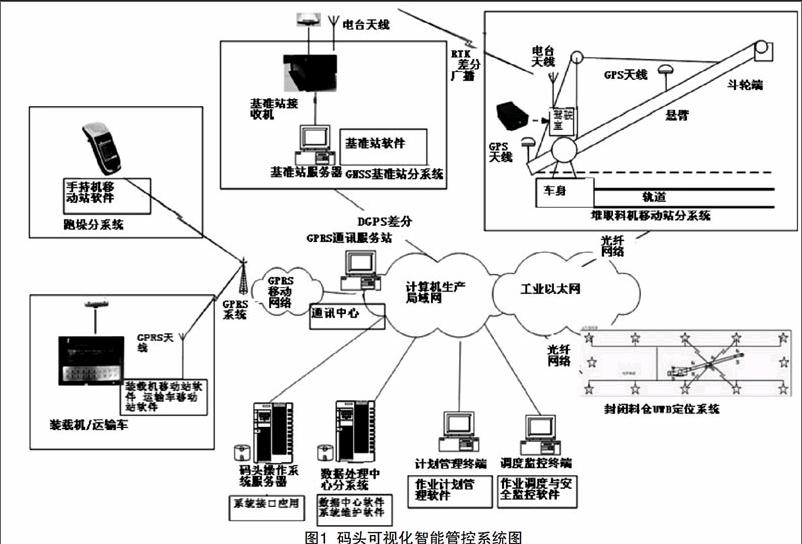
系统分成相对独立的几个分系统:GNSS基准站分系统、数据处理中心分系统、作业调度与安全监控分系统、车载移动站分系统、跑垛分系统、堆取料机GPS移动站分系统、封闭料仓UWB定位分系统。相关系统包括计算机网络系统、无线系统以及码头生产操作系统。码头可视化智能管控系统图如图1。
4 分系统设计
4.1 GNSS基准站分系统
GNSS基准站分系统负责生成差分改正数,并通过数据处理中心分系统转发给车载移动站定位分系统中所有车载移动站终端设备。
差分信息的播发的连续性和可靠性直接关系到全场的所有作业车辆的GNSS定位精度。鉴于GNSS基准站分系统在整个系统的重要性,系统采用两套GNSS接收机进行冗余热备,同时向GNSS数据处理中心分系统发送产生的差分改正信息以及基准站GNSS接收机自身的定位状态;GNSS中心选定其中一台基准站做为主站,另一台做为从站,当检测主站基准站GNSS接收机出现故障时,系统将自动选择从站的基准站GNSS接收机做为主站,从而保证GNSS系统运行的稳定性。
4.2 数据处理中心分系统
数据处理中心系统获取GNSS基准站分系统发送的差分改正信息,监控基准站接收机的工作状态;通过光纤网络接收大机的位置信息,并将实时位置信息存入GNSS数据库;通过与控制系统及生产管理系统的接口,为系统提供安全生产与预警的基础数据服务;实现调度作业指令的实时上传下达。
数据处理中心服务器采用双机集群服务器、并使用UPS电源。
4.3 作业调度与安全监控分系统
作业调度与安全监控分系统可展示场区作业状况,如显示作业机械位、各垛位的货物信息(货主、货名、吨数、起垛时间等信息)以及垛位进出的动态信息、港区地物等要素。可指定任意作业机械实现轨迹回放,指定任意作业机械实现跟踪漫游。接收数据处理分系统发送的作业区内被监控设备的位置信息,并发送作业调度指令。作业调度指令通过GPRS无线网络发送至作业机械的车载GNSS终端,司机确认操作后,信息再回傳给作业调度与安全监控分系统。
4.4 车载移动站分系统
车载移动站分系统通过GPRS接收GNSS数据处理中分系统转发的差分改正数;通过GPRS将位置信息回传至GNSS数据处理中心分系统;到达指令位置后自动上传到达信息,并提醒司机到达;对调度作业指令答复及完成确认;与调度终端的文字通讯功能,系统设计如下:
在港区的作业机械车辆上安装GNSS定位终端。GNSS定位终端接收GNSS差分改正数后,实现高精度定位,精度可达0.5m(CEP),同时将定位信息通过GPRS网络回传到GNSS数据处理中心分系统,进行车辆定位监控和数据存储。GNSS定位终端接收GNSS数据处理中心分系统转发的调度作业信息,结合GIS信息与GNSS实时定位信息,进行位置校核,实现作业指令位置到达触发、走垛位置判断等功能。
4.5 跑垛分系统
跑垛分系统结合高精度GNSS、GIS信息,实现跺位信息的更新维护(跑跺),对垛位实施精准化管理。根据前一天的跺位变化情况,生成跑跺清单,按清单要求进行跑跺作业,在垛位边界上确认位置,从而自动生成垛位边界准确数据。
在港区的专用车辆安装GNSS手持定位终端。GNSS手持定位终端实现高精度定位,定位精度达到分米级;利用高精度的GNSS定位信息,通过跑车对垛位边界的实时测量,准确的获得垛位边界信息。系统支持采用坐标3-6点GNSS数据圈定多边形货垛位置等功能。
GNSS手持定位终端通过GPRS网络接收机GNSS基准站播发的GNSS差分改正数,实现亚米级定位。该终端支持WindowsCE系统,实时接收GNSS高精度定位信息,实时的对垛位边界进行位置测量,从而对货垛边界进行确定,自动生成垛位边界信息。
4.6 堆取料机GPS移动站分系统
堆取料机的定位与悬臂姿态计算给司机提供位置导航和作业过程可视化,提供堆取料机定位信息给PLC进行堆取料机安全作业以及作业垛位错误控制。
每台移动站配置一台终端、一个IPC-VT定位控制设备、两个GNSS天线和一个电台天线,定位控制设备和GNSS天线之间串接避雷器,控制器通过串口与堆取料机PLC通讯模块连接。
一个GNSS天线安装在悬臂靠近前部一侧,另一个GNSS天线安装在大机后端距离前部天线5m以上,定位控制设备安装于驾驶室或电气柜内。
司机室可以安装图形化工控终端,与PLC的通讯相连,根据大机的位置进行位置作业导航显示,同时可看到其他堆取料机位置。
4.7 封闭料仓UWB定位分系统
在封闭料仓顶棚上以格状安置超宽频无线定位接收器,并在大机上多部位放置定位标签,标签每秒发射1~100次信号,通过定位接收器实时接收标签发出的信息,并转发到定位处理器进行处理,计算每个标签的实时位置(也就是需要被跟踪的目标所处位置及运动轨迹)。每一个标签都具有有一个独一无二的识别号,所以定位系统就知道每一个标签在每一个时刻的位置以及运动信息。然后根据标签的位置再实时分析出大机的位置与姿态,从而实现对大机的定位,同时,将大机的位置与姿态信息接入大机安全监控系统,监控中心实时监控大机作业的动态过程,并与实时位置进行比对,生成报警信息,发给相应的移动站或大机的PLC系统,PLC系统根据报警信息进行报警提示,提醒司机注意,并实现大机在危险状况下的自动制动,避免事故的发生。
5 结语
综上,本文对码头可视化智能管控系统进行了详细介绍,对其车载移动站分系统、跑垛分系统、堆取料机GPS移动站分系统和封闭料仓UWB定位分系统的功能一一做出了分析,做到作业车辆快速定位,实现了对任意车辆实现漫游跟踪、轨迹回放等功能,对垛位的空间、封闭料倉区域实施了可视化管理,对大机的作业实施了智能控制,实现了码头作业运行的管控一体化,提高了工作效益,保障了作业安全。
参考文献
[1]邱占芝,刘春玲.码头系泊实时监控可视化系统的设计与实现[J].大连交通大学学报,2010,31(5):71-74.
[2]郭享,苏志国,崔峰,等.码头三维可视化管控系统研究与应用[J].水运工程,2015(12):128-132.
[3]李亚辉,张远智,董国锋,等.GIS与GPS在码头调度中的应用[J].测绘通报,2015(2):117-120.