激光通信大口径地面站机电联合仿真
2017-06-01李朝阳张立中白杨杨
李朝阳,张立中,2,白杨杨,2
(1.长春理工大学 机电工程学院,长春 130022;
2.长春理工大学 空地激光通信国防重点学科实验室,长春 130022)
激光通信大口径地面站机电联合仿真
李朝阳1,张立中1,2,白杨杨1,2
(1.长春理工大学 机电工程学院,长春 130022;
2.长春理工大学 空地激光通信国防重点学科实验室,长春 130022)
针对激光通信大口径地面站对目标快速扫描、迅速捕获和稳定跟踪,减少伺服控制误差,采用Solidworks、ADAMS和MATLAB对大口径地面站机电控制系统联合仿真。联合仿真基于Solidworks建立的大口径地面站物理模型,在ADAMS建立起系统动力学模型,在MATLAB上建立起伺服控制模型。通过对系统模型仿真结果分析,说明系统响应速度快、超调量小,视轴指向精度优于5″,稳态跟踪精度优于10″,满足系统指标要求。仿真分析确立了系统的可实施性。另外伺服控制仿真参数为实际系统的控制调试提供了可靠参考,提高了设备研发效率。
激光通信;机电联合仿真;ADAMS;MATLAB
激光通信是激光携带信息进行通信,具有通信速率高、通信容量大、信息安全性高、体积小、重量轻和功耗低等优点[1]。激光通信对军事信息传输、民用通信以及太空探索信息传送等均有迫切需求[2]。
随着激光通信的不断发展,各国对激光通信技术的重视程度越来越高,对激光通信系统应用所涉及的各项关键性技术展开了更深入的研究[3]。空间激光通信工作环境一般比较复杂。激光的发射角比较小,这样导致了激光的光束很窄,光端机对光束的捕获难度增加。另外空间激光通信的距离远,通信光端机间有很大的相对运动存在。激光通信过程中地面站能否在光束到达地面站位置时对光束快速捕获和稳定跟踪成为激光通信能否稳定有效进行的前提条件。所以地面站对激光光束迅速响应和稳定跟踪一直是各国激光通信建设研究的重点。
基于Solidworks建立的物理模型,利用ADAMS和MATLAB进行机电联合仿真,在大口径地面站加工之前对地面站控制系统的关键性指标进行了仿真验证。确定了大口径地面站机构能够满足系统控制指标要求。为地面站前期设计和优化提供了有利参考,节约了大口径地面站的设计成本,提高了大口径地面站设计效率。
1 激光通信大口径地面站
激光通信大口径地面站主要完成对空间光端机发送的激光光束的扫描、捕获和跟踪,在跟踪过程中进行激光通信。大口径地面站主要由图像处理系统、伺服控制系统和激光通信系统等几大部分组成。其中伺服控制系统主要实现对目标的快速捕获瞄准和稳定精确跟踪。大口径地面站机构运动分为方位运动和俯仰运动。俯仰轴系运动机构主要由通信天线、四通、俯仰轴、轴承、分装式直流力矩电机、绝对式编码器、俯仰轴座等组成。方位轴系运动机构主要有方位轴基座、方位轴、分装式直流力矩电机、轴承、绝对式圆光栅、方位轴外壳和U形架等。另外除了系统运动部件外大口径地面站还有地脚调平机构、地面支座和限位机构。在Solidworks中建立三维结构模型,如图1所示。
大口径地面站伺服控制主要技术指标如下所示:
(1)转台运动速度>20°/s;
(2)保精度速度>2°/s;
(3)转台运动范围:方位:0°~360°,俯仰:-5°~+80°;
3)期限溢价是投资者持有长期债券承担远期风险的期限补偿,当宏观环境向好,投资者的风险偏好上升,对股市、原油等风险资产的需求增加,原油价格上涨,而对长期国债类防御性资产的需求减少,期限溢价上涨推高10年期国债收益率。
(4)视轴指向精度:优于5″;
(5)跟踪精度:优于10″。
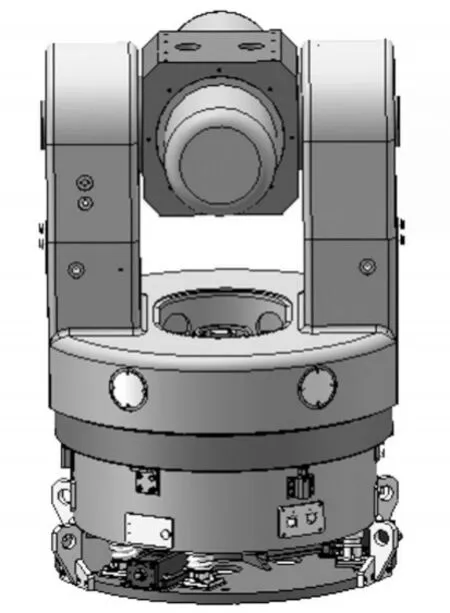
图1 大口径地面站结构示意图
2 地面站仿真模型建立
2.1 简化结构模型
在Solidworks中建立大口径结构简化模型,除去对伺服控制运动无关的地脚调平机构和地面支座等结构。另外对其余部件在总装之前进行试装、调整。由于利用ADAMS进行运动学、动力学仿真分析计算时,只需考虑构件的质量和质心位置,各个构件的外部形状不予考虑[4],所以在对各零件连接重组成构件的过程中只要在构件外形与原形差距不是很大的情况下,保证构件的质量和质心即可。由于轴承、电机、编码器和通信天线等器件内部零部件结构、材料各不相同,所以称量出其重量后以最接近原外形的情况下画出模型然后对其打孔、挖槽,进行质量和质心位置调整[5]。最后需要对俯仰轴系和方位轴系以增加配重等方式进行配平处理。将简化的模型另存为“x_t”格式导入到ADAMS软件中[6]。AD⁃AMS中仿真简化模型如图2所示。
2.2 ADAMS中仿真模型约束关系建立
导入ADAMS的模型各构件均定义为刚性,对各构件添加材料、颜色等属性。对各构件间设置约束关系。各构件间主要约束关系定义如表1所示。
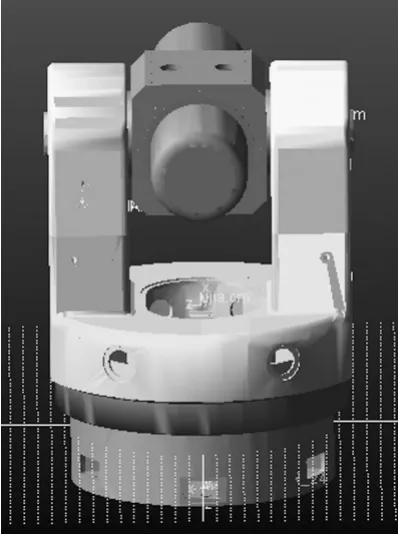
图2 仿真简化模型
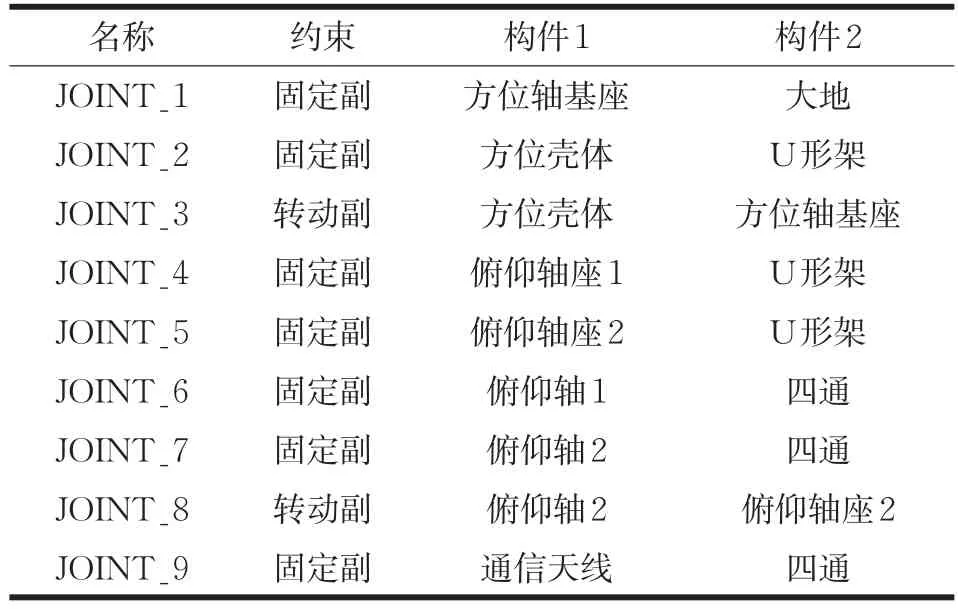
表1 ADAMS中主要构件约束关系
2.3 参变量设置
在ADAMS中对方位轴和俯仰轴转动副处分别施加旋转力矩pit_torque和az_torque。分别将状态变量VARVAL(pit_tor)和VARVAL(az_tor)赋值给pit_torque和az_torque。对运动机构存施加摩擦阻力矩,由于大口径地面站的摩擦阻力主要来源于轴承内部的摩擦,轴承内部的摩擦属于润滑钢和润滑钢之间的摩擦,阻尼系数为0.16[7]。在转动副JOINT_3和JOINT_8分别产生角速度测量值和转动角度测量值,方位轴系角速度:dakoujing.JOINT_ 3.MEA_1,俯仰轴系角速度:dakoujing.JOINT_8. MEA_1;方位轴系转动角度:dakoujing.JOINT_3. MEA_2,俯仰轴系转动角度:dakoujing.JOINT_8. MEA_2。各状态变量参数设置如表2所示。

表2 状态量与各参量设置对应关系
3 电机工作原理
根据直流力矩电机原理建立直流力矩电机电压-角位移模型框图,如图3所示。图中U(s)、ω(s)、θ(s)分别为电压、转动角速度和转动角度,La、Ra、Cm、Ce、I、E、Md和Mf分别为电机电感、电阻、转矩系数、反电动势系数、电流、反电动势、电机转矩和摩擦转矩,J为大口径地面站总转动惯量。

图3 电机模型框图
ADAMS与MATLAB联合仿真中电压-转矩模型在MATLAB中建立,转矩-转动角度模型在ADAMS中实现。电压-转矩模型传递函数如式(1)。
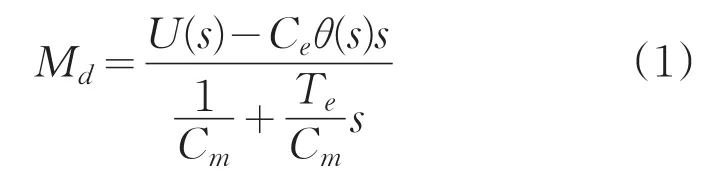
式中,Te为电机电磁时间常数,Te=La/Ra。

表3 俯仰轴电机控制单元基本参数
俯仰轴和方位轴有相同的控制特性,列出俯仰轴电机控制单元基本特性参数,如表3所示。
4 ADAMS与MATLAB联合仿真
4.1 联合仿真控制系统搭建
ADAMS与MATLAB联合仿真原理框图如图4所示。
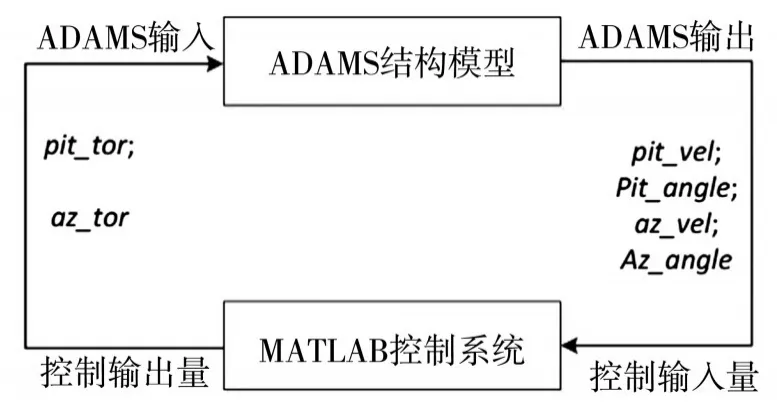
图4 联合仿真原理框图
在ADAMS和MATLAB接口建立好之后,打开MATLAB调出接口控制模型,利用adams_sub接口在MATLAB/Simulink模块中搭建控制系统。adams_sub接口内部模型如图5所示。

图5 adams_sub接口内部模型
在MATLAB/Simulink中建立控制系统。控制系统原理图如图6所示。

图6 控制系统原理图
图中“地面站”即为ADAMS中模型,在AD⁃AMS中建立起的测量值作为控制系统的反馈值与控制信号构成闭环。为提高系统响应速度、运动精确度,采用双闭环控制系统,位置环控制器和速度环控制器双控制器共同控制。考虑到大口径地面站结构较大,野外工作时会受到风力等干扰力矩的影响,本次仿真加入了-2~+2N·m范围的力矩随机干扰信号。
系统接入阶跃信号和正弦信号对响应速度和稳态跟踪精度等系统性能做了仿真测试。联合仿真控制系统阶跃响应模型如图7,正弦响应模型如图8所示。
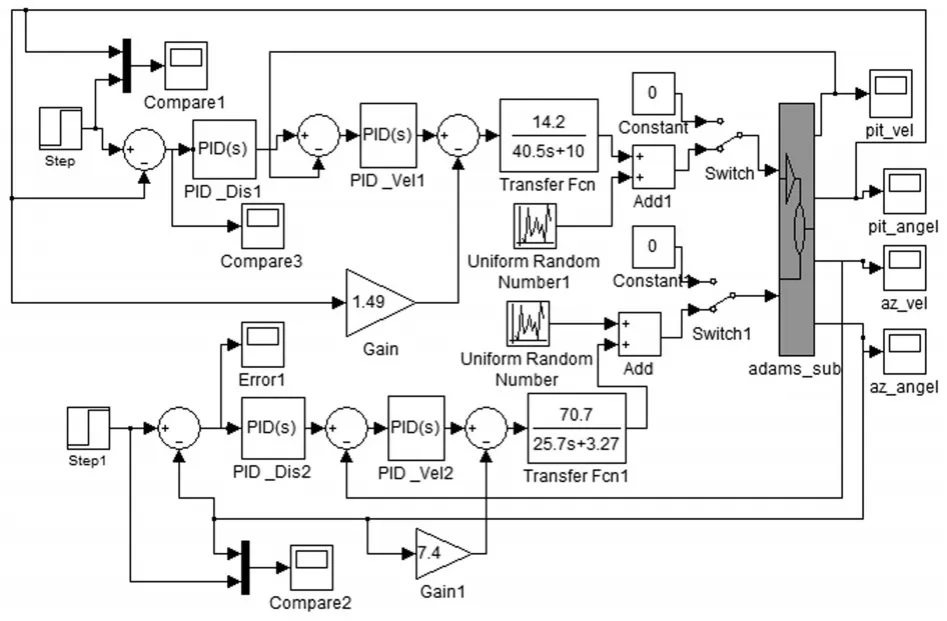
图7 阶跃响应联合控制模型
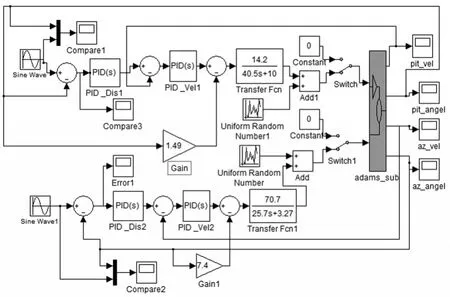
图8 正弦响应联合控制模型
4.2 仿真结果分析
大口径地面站控制器根据临界比例度PID整定法[8],通过观察系统响应曲线反复调整控制参数最终确定各控制器参数。
(1)方位运动仿真结果及分析
方位轴转动位置环采用PI控制器,各参数设置:P=10,I=0.2;速度环采用PID控制器,各参数设置:P=80,I=20,D=1。当方位轴输入终值为3的阶跃信号,方位阶跃响应曲线如图9所示。方位阶跃跟踪误差曲线如图10所示。当方位轴输入3sin(t)正弦信号,方位正弦响应如图11所示。方位跟踪误差曲线如图12所示。
从图9得出系统阶跃响应时间0.35s,超调量为0.66%,系统响应速度快而且有较小的超调。从图10得出指向精度为1.25×10-3度(4.5″),小于5″(5.43″)。从图12可以得出系统稳态精度1.51×10-3度,优于10″。
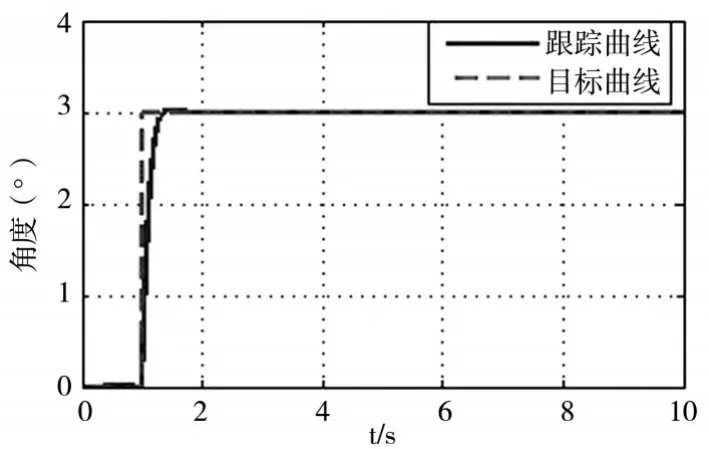
图9 方位阶跃响应曲线

图10 方位阶跃跟踪误差曲线
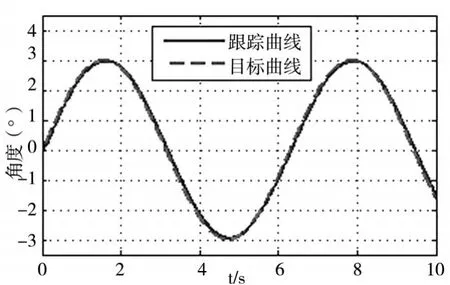
图11 方位正弦响应曲线
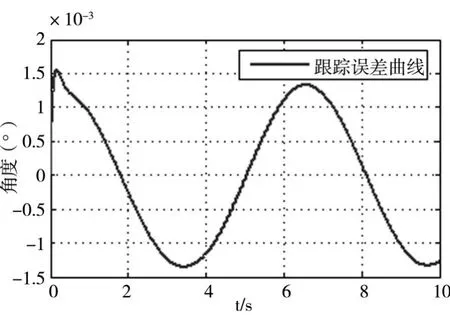
图12 方位跟踪误差曲线
(2)俯仰运动仿真结果及分析
俯仰轴转动位置环采用PI控制器,各参数设置:P=50,I=1;速度环采用PID控制器,各参数设置:P=10,I=2,D=2。当俯仰轴输入终值为3的阶跃信号时,俯仰阶跃响应如图13所示。俯仰阶跃响应误差曲线如图14所示。当俯仰输入3sin(t)正弦信号,俯仰正弦响应如图15所示,俯仰正弦跟踪误差曲线如图16所示。
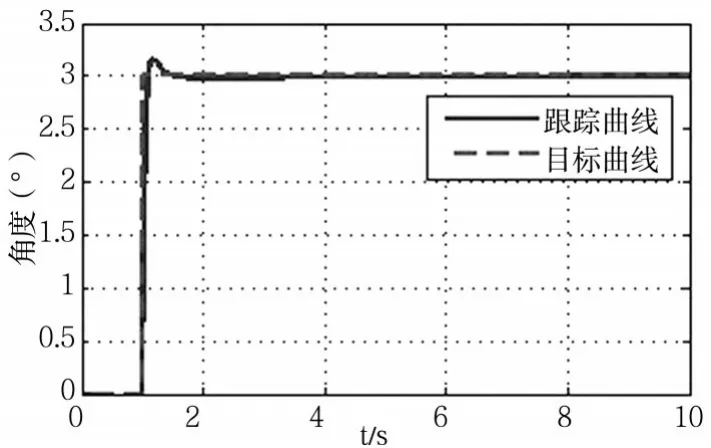
图13 俯仰阶跃响应曲线
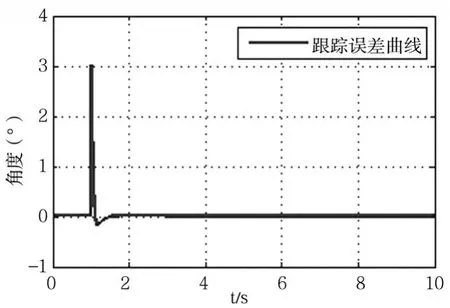
图14 俯仰阶跃跟踪误差曲线
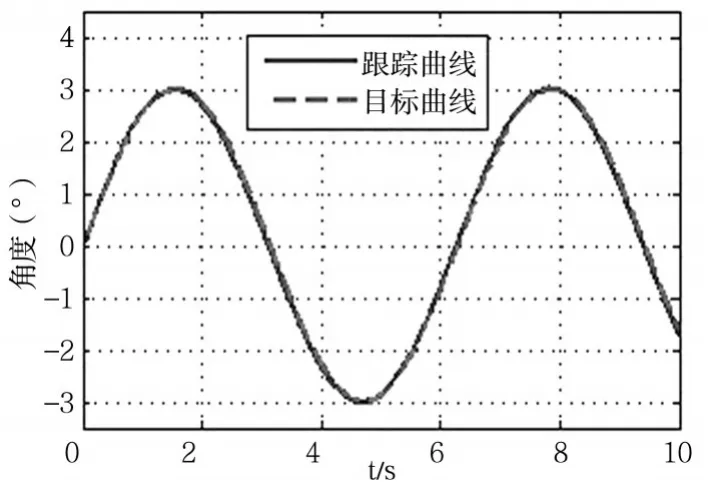
图15 俯仰正弦响应曲线

图16 俯仰跟踪误差曲线
从图13得出俯仰稳态响应时间为0.12s,超调量为5%,系统响应迅速,超调量也比较小。从图12得出指向精度为1.35×10-3度(4.86″),满足指标优于5″要求。从图16俯仰跟踪误差曲线可知系统稳态精度为1.06×10-3度(3.82″),优于10″,满足指标跟踪精度要求。
5 结论
本文通过对大口径地面站机电联合仿真分析得出,系统稳态响应速度快,超调量小,跟踪精度高。最大超调量5%,视轴指向误差满足系统指标要求优于5″,跟踪误差小于10″,满足指标跟踪精度要求。本次仿真加入了运动摩擦,另外对机器实际工作情况给予考虑,施加了外部干扰力矩,更贴近真实工作状态。在物理样机制造之前通过模拟控制系统工作状态,测试各运动性能,对系统研发和优化提供很大帮助。
[1]胡贞,姜会林,佟首峰,等.空间激光通信终端ATP技术与系统研究[J].兵工学报,2011,32(6):752-757.
[2]姜会林,安岩,张雅琳,等.空间激光通信现状、发展趋势及关键技术分析[J].飞行器测控学报,2015,34(3):207-217.
[3]张靓,郭丽红,刘向南,等.空间激光通信技术最新进展与趋势[J].飞行器测控学报,2013,32(4):286-293.
[4]王会彬,赵海娜,郑华山.基于MATLAB和ADAMS的转台系统联合仿真[J].军民两用技术与产品,2015(03):56-58.
[5]赵玉麟.基于ADAMS和Matlab的导引头机电系统仿真[J].弹箭与制导学报,2009,29(4):77-79.
[6]王会彬,赵海娜,郑华山.基于MATLAB和ADAMS的转台系统联合仿真[J].军民两用技术与产品,2015(5):56—58.
[7]马国栋,张立中,张雪瑶.基于ADAMS和MATLAB的一对多激光跟踪天线联合仿真[J].长春理工大学学报,2016,39(3):78-82.
[8]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2016.
[9]马冉冉,王彤宇.基于ADAMS的二维跟踪转台动力学耦合分析[J].长春理工大学学报:自然科学版,2015,38(1):79-84.
[10]孟立新.机载激光通信屮捕获与跟踪技术研究[D].长春:吉林大学,2014.
Electromechanical Co-simulation of
Large-caliber Ground Station in Laser Communication
LI Chaoyang1,ZHANG Lizhong1,2,BAI Yangyang1,2
(1.School of Mechatronical Engineering,Changchun University of Science and Technology,Changchun 130022;2.Fundamental Science on Space-Ground Laser Communication Technology Laboratory,Changchun University of Science and Technology,Changchun 130022)
Aiming at large-caliber ground station for laser communication,with the target that can be quickly scanned,quickly captured and stably tracked to reduce the servo control error,the electromechanical control system of large-caliber ground station was simulated by applying Solidworks,ADAMS and MATLAB.Based on the physical model of Solidworks,the system dy⁃namics model was established in ADAMS and the servo control model is built on MATLAB.The simulation results show that the response speed of the system is fast and the overshoot is small.The pointing accuracy of the boresight was better than 5″and the tracking accuracy of the steady state was better than 10″and the system requirements were met.The feasibility of the system was established by simulation analysis.In addition,a reliable reference for the actual system control and debugging was provided by servo-control simulation parameters and the efficiency of equipment research and development was improved.
laser communication;electromechanical co–simulation;ADAMS;MATLAB
TN9291
A
1672-9870(2017)02-0070-05
2016-12-28
李朝阳(1991-),男,硕士研究生,E-mail:2310021705@qq.com
张立中(1968-),男,教授,博士生导师,E-mail:zlzcust@126.com