机器人在玻璃涂胶控制系统的应用
2017-05-31杨欣慧
杨欣慧
摘要:本文的研究核心是应用机器人对玻璃进行涂胶,机器人作为执行元件,反应快,且可以长时间持续工作、精确度高、抗恶劣环境的能力强,是工业以及非产业界的重要生产和服务性设备。机器人控制系统的手腕、肘关节运动通过伺服电机来控制,准确、反应快,零惯性;通过示教作业控制机器人系统的软件操作,指定的机器人语言来控制机器人的涂胶操作。
关键词:机器人 示教作业 伺服电机 再生作业
中图分类号:TP242 文献标识码:A 文章编号:1009-5349(2017)07-0033-01
一、机器人系统的硬件结构
机器人系统包括四部分组成:机器人主体、悬式示教操作台、AX控制装置、操作面板。
机器人主体的作用相当于机械手,完成对玻璃的涂胶;关节部分通过伺服电机控制,将输入的电压信号转化成角位移信号,工作稳定性好,精度高,所需要电压小,在0-15V电压作用。伺服电机的控制方式是脉宽调制(PWM)控制方式,通过数字量对模拟量进行控制,经济、抗干扰,节约空间,电机能够迅速制动,无惯性旋转。
旋转示教操作台能够完成手动作业,以“手动操作”将机器人诱导至将要记录的点。旋转方式包括:机器人主体旋转,上腕旋转,下腕前后动作,手掌上下动作,上腕上下动作,手掌旋转。
AX控制装置外接外部紧急停止输入、安全插头輸入、示教动作开关输入等设备。当外部紧急停止输入信号变成开启状态时,机器人立即发生紧急刹车,运转准备(伺服电源)会被硬件电路切断。机器人在动作中,为了预防作业人员未经许可就进入安全防护栅,设有安全插头,当门扉开时,机器人即自动停止,而其连接至机器人控制装置的安全插头输入。
二、机器人系统的软件调试
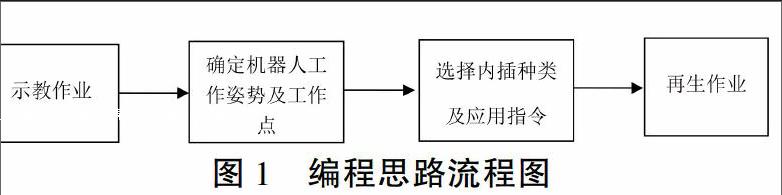
机器人系统的编程思路是:先进行示教作业,再进行再生作业。示教作业是指教给机器人动作及位置号码,此工作是在现场调试完成的。示教的过程需要确定机器人工作姿势及工作点,在调试中根据玻璃的形状选择内插种类及应用指令。示教结束后,选择再生作业,即机器人按照示教指定的工作轨迹进行再生作业。具体流程图如下图1所示。
图1 编程思路流程图
在机器人软件调试的过程中,示教作业是调试的核心。示教作业需要反复调试,根据玻璃的形状,结合机器人指令、机器人工作姿势及工作点,确定转轴的位置及工作点。调试中出现的问题主要包括两个方面:收尾处的胶形控制和胶形的控制。因涂胶的形状是闭合的曲线,收尾处的轨迹控制需要走外缘切线及适当的调整玻璃的角度,这样才能满足玻璃涂胶胶形的工艺要求。胶形的控制需要采取胶形垂直于地面的方式,否则容易出现倒胶的效果。
三、实验数据
在玻璃粘接中需要先涂玻璃底胶,玻璃底胶相对稳定性好,在使用前需要在室温下放置2-24小时;如果不用时,瓶口应密闭。底胶在空气中自然干燥的时间至少为5min。在涂底胶的过程中,需要先确认胶条有无裂纹、弯曲、变形、变色等外观缺陷,且不能黏附油、水、手纹等污渍。
底胶涂完后,沿着底胶进行涂胶,加热有利于提高胶体的化学性能,提高内聚强度与粘接强度。加热固化的方式有多种:电加热,高频加热及超声波加热等。加压也影响胶粘剂的固化,使胶膜更加均匀地渗透微孔,加快胶粘剂的缩聚反应,同时有利于排除水分、溶剂、气泡等物质,粘接强度高。安装压力一般在玻璃上加压100N—150N,具体情况具体分析。加压过程中会产生剪切力,剪切力是指物体由于载荷、温度等外界因素变化时,胶体产生变形,它的内部任一截面产生的相互作用力,剪切力越大,剪切作用越强,效果也越好。
粘接宽度是指充分挤压的玻璃的有效宽度,黏结宽度越宽,所能承受的剪切力越大。
静负荷是指单位面积上承受的力,由实验可知:温度越高,同等压力下,涂胶的下压量越大;同一温度下,静负荷越大,涂胶的下压量越大。
通过实验可知:玻璃胶截面的形状是三角形,长7mm,高12mm,能够符合基本的工艺要求。
四、结论
总之,系统以机器人控制系统为控制装置的核心,机器人系统通过编制机器人识别的语言,控制机器人的涂胶操作,控制精度高,手臂旋转灵活,可以在恶劣的环境中长期使用;而且可以输入不同的编程指令,来控制不同车型玻璃的涂胶操作,实用性高。因此,在企业的汽车涂胶控制系统中应用很广。
参考文献:
[1]张于明.玻璃涂胶控制系统的调试与安装[J].华北电力大学学报,2015,l0(1).
[2]王霞.机器人在玻璃涂胶控制系统的应用[J].吉林大学学报,2016,7(5).
责任编辑:杨国栋
