仿人二足步行机器人爬楼梯行走机构设计
2017-05-30杨彦平
杨彦平
摘 要:随着人类社会的发展,各种各样的机器人正渐渐的走进我们的视野,有很多的地方都用到了机器人,在机器人的领域里越来越多的人开始爱好上了机器人。能更好的适应环境和地形是仿生机器人的优点,很多人的工作可以由各种各样的机器人去替代,对这种类人机器人的研究一直是人们关注的热点。
关键词:仿人二足爬楼梯行走机构;步态规划;机构设计;四杆机构;CATIA
1 二足仿生机器人的特点
当前,人们对机器人的研究在不断深入,尤其是对类人机器人的探索和应用正在受到极大的关注,并逐渐成为智能机器人行列中的主要研究对象。类人二足机器人爬楼梯的想法就变得更加现实,这种机器人具有人类的基本特性,例如:具有人类的灵活性,可以有思维,与人对话等,同时它也可以适应不同的环境,帮助人类完成人们完成不了的任务,这种类人二足机器人爬楼梯设计奖机器人的行动具体到爬楼梯动作上,可以减轻工人的工作强度,极大地提升工作效率,从而更好地服务人类。
1.1 设计目的
本设计主要是利用机械原理相关知识合理设计机械腿的相关尺寸及机构来实现爬楼梯的功能。
1.2 技术要求
(1)电机的选择和控制原理;(2)运动学的分析和仿真;(3)连杆机构,传动机构的设置;(4)稳定性,重心转移。
1.3 应解决的主要问题
(1)重心对于机器人行走稳定性的影响,对机体质心及其稳定性;
(2)二足行走机构的设计;
(3)两腿之间运动时的协调配合,以及周期的确定;
(4)运动学解析:创建合适的运动学的模型,进而对各阶段的运动进行运动学的解析和分析。
1.4 技术路线
(1)收集国内外仿人二足步行机器人爬楼梯行走机构的相关资料,分析并消化,总结出我们自己的方法;
(2)仿人二足步行机器人爬楼梯行走机构的步态规划,选择合适的步态,并稳定性分析,行走步态设计;
(3)根据机构和运动学方面的分析,描绘类人二足步行机器人上楼梯时的行走过程的机构原理图;针对运动特征设计相应机构,改善运动机构完成设计。
(4)根据腿的二维平面设计示意图进行三维设计,并用CATIA软件进行机构行走仿真,动态模拟分析。
2 仿人二足步行机器人爬楼梯行走机构步行的相关概念
步态:通常在二足机器人步行的运动过程中,机器人的不同关节运动的一种协调关系在时序和空间上,以及机器人相对不同环境的一种关系。可由不同关节角运动轨迹和质心轨迹来表达。
步距:在行进的过程中,机器人的左脚和右脚落地位置间的纵向的距离。
跨高:当摆动腿在行进的过程中脚底离地面的最高的距离,可以作为机器人跨越楼体高度的大小。
步行周期:对机器人在周期性行走过程中,左脚或右脚顺序两次着地时所用的时间。在每个循环内左右腿各向前迈一次,它又分了3个阶段,即双脚的支撑期、左脚的支撑期和右脚的支撑期。
步速:作为机器人步行能力的重要指标,是指机器人按单位时间内相对步行的环境所行进的距离。
单脚的支撑:机器人仅拥有一只脚在与地面接触,它起支撑的作用,而另外的一只脚处于摆动的状态。
2.1 行进过程的设定
这里所描述的类人二足步行机器人爬楼梯的行进机构设计的目的是实现爬楼梯的基本功能,同时对机器人行进的环境应有一定的保证,在不影响机器人基本功能的前提下做出以下的设定:
(1)机器人在行进的过程中它是处于一种静力学平衡的状态,即机器人行进方式为静态步行;
(2)因为楼梯的台阶具有良好的水平性,就设定了机器人脚底面相对于台阶表面始终保持平行的状态;
(3)让机器人沿着直线行进;
(4)机器人沿直线行进的过程中,髋关节与地面的距离保持不变;
(5)二足机器人的左腿与右腿的关节具有对称性,在讨论中只考虑左腿的运动情况,右腿的情况与左腿类似。
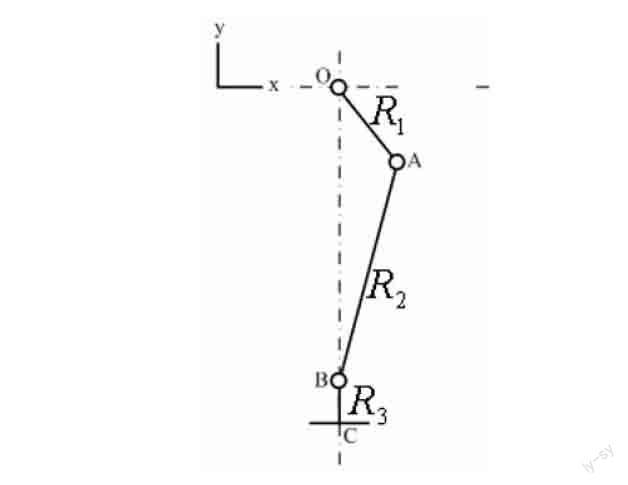
仿人二足步行机器人爬楼梯行走机构机械图如下图所示:XY平面投影定义的大腿长为R1,小腿的长度为R2。
由上图可以看出,仿人二足步行机器人爬楼梯行走机构髋关节向上旋转了角度的时候,其中大腿在Y轴方向提升高度,仿人二足步行机器人爬楼梯行走机构大腿Y方向提升高度。
2.2 步行稳定性的判断依据
二足机器人在步行的运动过程中,左右脚交替的与地面,发生周期性的作用,交替进行不断前进。二足机器人步态研究的关键点就在于如何使支撑脚与地面的瞬时位置固定,使机器人在运动的过程中保持稳定步行避免发生滑倒或翻倒。
2.3 髋关节设定
第一次设定的轨迹不一定使机器人稳定,故在髋关节轨迹的规划过程中设几个可调参数,根据调节参数让机器人保持稳定。
(1)执行机构决定了整个系统的复杂度,机构越复杂,涉及的工作和配合越多,制作的精度就不容易保证;
(2)执行机构关系到运动的最终状态,决定运行的姿态;
(3)执行机构可保证机器人整体功能的运转。
腿部的结构是二足机器人身体里主要的部分,根据仿生学的知识,人腿部结构大致为:髋关节,和膝关节,还有踝关节和脚。本文采用曲柄摇杆机构实现其直线行走和爬楼梯功能的。两组腿交替的变换使机身能向前运动,他们每组都支撑机体的重量,并在负重的状态下使机体前行,因此合适的刚性和承载能力是非常重要的,所以对承载能力有着限制。
3 设计小结
通过这次机械原理课程设计,综合运用了机械原理及其他课程的理论知识。将理论与实际结合在了一起,解决机械工程有关的实际问题,最重要的是从所学专业中找到了乐趣。在本次机械原理的课程设计训练中巩固学习了机械原理设计基础、CAD二维制图软件和CATIA三维软件,也学会了怎样从前人设计中取得经验以及处理数据的能力。
参考文献
[1]张瑞红,金德文,张济川,等.不同路况下正常步态特征研究[J].清华大学学报(自然科学版),2000,8(40):77-80.
[2]张春林编.机械创新设计[M].机械工业出版社,2007.
[3]陈学东,孙翊,贾文川.多足步行机器人运动规划与控制[M].武汉:华中科技大学出版社,2006.
(作者单位:重庆交通大學)
