基于排序的自动剔除Switching-CFAR检测器
2017-05-25刘贵如王陆林邹姗
刘贵如,王陆林,邹姗
(1.安徽工程大学计算机与信息学院,安徽芜湖241000; 2.奇瑞汽车股份有限公司前瞻技术研究院,安徽芜湖241006)
基于排序的自动剔除Switching-CFAR检测器
刘贵如1,王陆林2,邹姗1
(1.安徽工程大学计算机与信息学院,安徽芜湖241000; 2.奇瑞汽车股份有限公司前瞻技术研究院,安徽芜湖241006)
针对传统恒虚警(Constant False-Alarm Rate,CFAR)检测器在非均匀噪声环境下检测性能较差的问题,本文提出了一种基于排序的自动剔除Switching-CFAR(Automatic Censoring Switching-CFAR Detector Based on Sorting,ACS-CFAR)检测器.选择参考窗中间单元为测试单元,其余单元按照幅值升序排列,根据两个分界点位置参数,选择合适的参考单元集进行背景噪声功率估计以及结合参考单元数和目标恒虚警率计算相关系数,得到最优检测门限.经过仿真对比,ACS-CFAR检测器在均匀噪声环境下检测率为98.73%,接近于单元平均恒虚警(CA-CFAR)检测器;在非均匀噪声环境下检测率为98.16%,优于可变索引恒虚警(VI-CFAR)和自动删除平均恒虚警(ACCA-CFAR)检测器,虚警率误差均控制在0.10%以内.结果表明,本文提出的ACS-CFAR检测器在均匀噪声环境以及杂波和多目标干扰环境下均具有较好的检测性能.
目标检测;恒虚警;自动剔除;Switching-CFAR;非均匀噪声
0 引言
目前大部分雷达系统均通过测试单元与检测门限的比较来判断目标的有无[1],各种目标检测算法的关键在于最优检测门限估计[2],在保证恒虚警(CFAR)概率的同时尽可能地提高目标检测率[3].应用最广泛的是基于平均功率的检测器[4],如单元平均恒虚警(CA-CFAR)[5]、最大选择恒虚警(GO-CFAR)[6]和最小选择恒虚警(SO-CFAR)[7]等检测算法.CA-CFAR检测算法在均匀背景噪声环境下,具有最优的检测性能;但是当参考窗长度增加时,参考窗中可能包含有较多目标干扰和杂波干扰信号单元,这时功率估计值偏差较大[8],检测性能下降明显,当有效目标信号单元被大量杂波信号单元淹没时,虚警率偏高[9].GO-CFAR检测算法针对边缘杂波干扰和多目标干扰,能保持稳定的虚警概率,但检测性能严重下降[10-11].SO-CFAR检测算法检测性能最好,但在杂波边缘干扰和多目标干扰环境下,虚警率过高[12].另外一种应用比较多的是基于有序统计的恒虚警(OS-CFAR)检测算法[13].Rickard和Dillard提出了删除平均功率的恒虚警(CMLD-CFAR)检测算法[14],通过将极大值参考单元从参考窗中删除,优化了平均噪声功率的估计,在多目标干扰环境下具有稳定的检测性能,但针对杂波边缘干扰环境,虚警率仍然过多.同时Rohling等人也提出了一种改进的消减平均恒虚警(TM-CFAR)检测器,删除部分极大和极小值参考单元后,通过剩余参考单元来估计背景噪声功率.这两种算法引入了删除算法,可以适当剔除部分干扰单元,提高噪声功率的估计精度,但需要事先知道干扰目标和杂波干扰单元的数量,实用性差[15].所以Barkat等人提出了自动删除平均恒虚警(ACCA-CFAR)检测器[16-17],不需要任何先验数据,通过自适应比较的方式剔除不需要的参考单元,在目标干扰环境下能够保持稳定的虚警率,但在杂波边缘干扰环境下仍然具有过多的虚警率[18].鉴于各检测算法的优点,Smith和Varshney提出了可变索引恒虚警(VI-CFAR)检测器[19],该算法能够在CA-CFAR、SO-CFAR和GO-CFAR算法之间进行动态切换,在均匀和非均匀噪声环境下具有很好的检测性能,但当目标干扰信号和杂波边缘干扰信号在参考窗口中分布不集中时,该算法的检测性能明显下降,具有一定的局限性.不同CFAR检测算法的差异主要在于估计背景噪声功率时选择参考单元的方法不同,如果能够根据参考窗口中各参考单元的分布特性,再选择合适的参考单元进行噪声功率估计[20-21],剔除不需要的参考单元(包括目标干扰和杂波干扰信号单元),就可以得到最优的检测门限[22].
本文结合删除算法和VI-CFAR的优点,在参考窗中参考单元按幅值大小进行升序排序的基础上,提出了一种基于排序的自动剔除Switching-CFAR(Automatic Censoring Switching-CFAR Detector Based on Sorting,ACS-CFAR)检测器,该检测器能够通过参考窗口中噪声单元、杂波信号单元和干扰目标信号单元的数量统计,得到能够表征有序参考单元序列中集中存放的各类参考单元的边界点参数,从而判定测试单元在原参考窗中的分布特性(即是否淹没在杂波干扰信号或者干扰目标信号当中),从而可以选择有效的参考单元估计背景噪声功率,得到最优的估计值,避免背景噪声功率估计值偏低或者偏高而导致过多的虚警率或者检测率降低即遮挡效应,间接剔除了目标干扰信号和杂波信号,提高了ACS-CFAR检测器的自适应性,不仅在均匀噪声环境下具有和CA-CFAR同样的检测性能,而且在杂波干扰环境下具有接近于GO-CFAR的检测性能,同时在杂波干扰和多目标干扰环境下,ACS-CFAR检测器的检测性能优于ACCA-CFAR和VI-CFAR检测器.
1 ACS-CFAR检测器
1.1 检测器结构图
ACS-CFAR检测器的结构原理图见图1.雷达前端返回的同相I和正交Q信号,首先经过滤波包括时域滤波和频率滤波后进入检波器,输出的参考信号单元预存在抽头延迟线性数组中,从中选择N+1个参考单元,选择中间参考单元作为测试单元X0,左侧相邻的N/2个和右侧相邻的N/2个,共计N个参考单元组成参考窗,表示为X1,X2,···,XN.
1.2 检测器描述及步骤
步骤1∶参考单元排序.先对参考窗口中N个参考信号单元X1,X2,···,XN按照信号功率(即幅值)进行升序排序,能量相对较小的热噪声单元排在低端,能量相对较大的杂波信号和目标干扰信号参考单元排在高端,排列后的N个有序参考单元序列X(1),X(2),···,X(N)表示为

其中X(i),i=1,2,3,···,N的概率密度函数可以表示为[17]

这样有序排列有助于统计参考窗口中热噪声单元、杂波干扰单元和目标干扰单元的数量和参考单元的提取.
图1中k1为参考窗中热噪声叠加杂波干扰信号的参考单元或者热噪声叠加目标干扰信号的参考单元的数量,k2为参考窗中热噪声叠加杂波干扰信号和目标干扰信号的参考单元的数量.因为测试单元X0在参考窗X1,X2,···,XN中的位置是固定的,处于正中间的位置,见图1.通过k1和k2可以区分测试单元X0在参考窗口中所处环境,比如是处于热噪声单元中还是夹杂在杂波信号当中或者淹没/夹杂在目标干扰信号当中,根据判定结果从排序后的参考单元序列中选择合适的参考单元估计背景噪声功率.如果检测单元淹没在杂波信号单元或者干扰目标信号单元中,而且幅值小于杂波信号单元或者干扰目标信号单元幅值,则为微弱目标回波信号[15],此时检测器可能无法检测到,但是该算法能够保证杂波干扰和目标干扰环境下稳定的虚警概率,避免过多虚警.

图1 ACS-CFAR检测算法结构原理图Fig.1 Structure of the ACS-CFAR detector
步骤2∶确定参数k1,k2.X(1),X(2),···,X(N)序列为非独立同分布,需要先进行归一化处理,得到独立同分布序列,Y1,Y2,···,YN.转化公式为[19]

其中X(0)=0.
k1的计算公式为[19]

其中,j=1,2,3,···,(N-1),Tj为ACS-CFAR检测器剔除算法的相关参数,其计算公式为[20]

其中Pfc为ACS-CFAR检测器剔除算法消减概率.
k2的计算公式为[19]

其中l=1,2,···,(N-1).如果k1>N/2时,则没必要计算k2,故设为0.Tl-k1+1同样为ACS-CFAR检测器剔除算法的相关参数,其计算公式为[20]

步骤3∶背景噪声功率估计.根据参数k1和k2,可以估计出参考窗中热噪声参考单元、杂波参考单元、干扰目标参考单元的数量,从而有效区分测试单元X0在参考窗口中是处于均匀噪声环境还是非均匀噪声环境,并从排序后的参考单元序列中有效提取合适的参考单元进行背景噪声功率估计,得到最优的实时背景噪声功率估计值.当检测单元没有淹没在杂波或者干扰目标回波信号单元中间时,可以达到间接剔除目标干扰信号和杂波边缘干扰信号的目的.下面给出了5种情况下,背景噪声功率的估计方法如下.
(1)当k1=0,k2=0时,表示参考窗口中没有杂波干扰单元和干扰目标回波信号单元,只有热噪声单元.噪声功率可以通过参考窗中N个全部参考单元进行估计.与CA-CFAR方法相同,背景噪声功率Z的计算公式为[15]

(2)当0<k1≤N/2,k2=0时,表示参考窗中测试单元处于杂波信号或者目标干扰信号当中,为了避免噪声功率估计值偏低,导致过多的虚警率,从X(1),X(2),···,X(N)低端去掉k1个热噪声单元,选择高端剩余N-k1个参考单元进行估计.背景噪声功率Z的计算公式为

(3)当0<k1<N/2,k1<k2≤N/2时,表示参考窗中测试单元同时处于干扰信号和杂波信号当中,为了避免背景噪声功率估计值偏低而导致过多的虚警率,从X(1),X(2),···,
X(N)低端去掉k2个幅值较小的热噪声单元或者杂波信号单元,选择剩余N-k2个幅值较大的参考单元进行估计.背景噪声功率Z的计算公式为
(4)当k1>N/2,k2=0时,表示参考窗中测试单元未处于杂波信号或者干扰目标信号当中,只处于热噪声单元当中,避免背景噪声功率估计偏高,而导致检测率降低即遮挡效应,去除高端幅值较大的N-k1个参考单元,选择低端k1个幅值较小的热噪声单元进行估计.噪声功率Z的计算公式为

(5)当0<k1≤N/2,k2>N/2时,表示参考窗中测试单元处于杂波干扰信号和目标干扰信号当中,未同时处于干扰信号单元和目标干扰信号当中,为了避免背景噪声功率估计值偏低或者偏高,而导致过多的虚警率和检测率降低即遮挡效应,从X(1),X(2),···,X(N)低端去掉k1个幅值较小的热噪声单元和从高端去掉N-k2个幅值较大的参考单元,选择剩余的k2-k1个参考单元进行估计.背景噪声功率Z的计算公式为

步骤4∶计算比例因子T.假设系统目标恒虚警率设定为Pfa,则当k1=0,k2=0时,T的计算公式为

当0<k1≤N/2,k2=0时,T的计算公式为

当k1>N/2,k1<k2≤N/2时,T的计算公式为

当k1>N/2,k2=0时,T的计算公式为

当0<k1≤N/2,k2>N/2时,T的计算公式为

步骤5∶目标的假设检验.假设Z为背景噪声功率估计值,T为对应的比例因子,则测试单元X0是否为有效目标的回波信号单元的判别式为

其中,H1表示有目标,H0表示无目标.
2 性能仿真分析
2.1 均匀噪声环境下性能仿真分析
在Matlab环境下,通过蒙特卡洛方法进行模拟均匀噪声环境下性能仿真.因为参考窗中没有杂波信号和目标干扰信号单元,只有热噪声信号单元,所以k1=0,k2=0.图2为本文所提出的ACS-CFAR检测算法,在N=24、目标虚警率Pfa=10-4和Pfc=10-3的均匀背景噪声仿真环境下与各检测算法检测性能仿真结果对比.
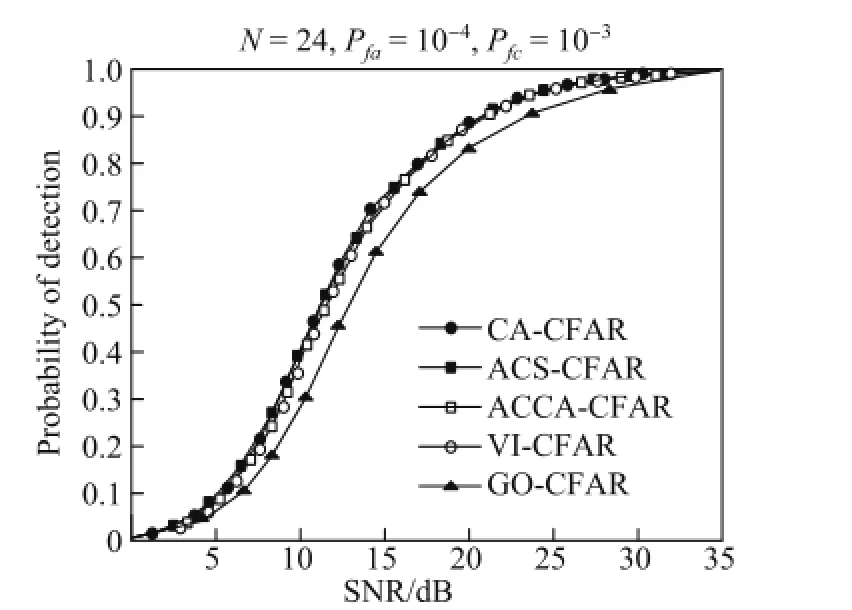
图2 各检测器在均匀背景噪声下的检测率对比Fig.2 Probability of detection comparison between detectors in homogenous environment
从图2可知,SNR=25dB时,ACS-CFAR检测器检测率为98.73%,与ACCA-CFAR和VICFAR检测器的检测性能差不多,接近于CA-CFAR检测器的检测性能.同时对比参考文献仿真结果数据,SNR=25 dB时,文献[5]中CA-CFAR检测器的检测率为98.88%,文献[6]中GOCFAR检测器的检测率为93.68%,文献[16]中ACCA-CFAR检测器的检测率为98.69%,文献[19]中VI-CFAR检测器的检测率为98.56%.对比结果也表明本文提出的ACS-CFAR检测器在均匀噪声环境下,检测率大于GO-CFAR、ACCA-CFAR和VI-CFAR检测器的检测率,小于CA-CFAR检测器的检测率,相差小于0.10%.
2.2 非均匀噪声环境下性能仿真分析
2.2.1 杂波边缘干扰环境下性能仿真分析在模拟的杂波干扰环境下,因为参考窗中含有热噪声和杂波干扰信号.假设在参考窗口中只包含一种杂波干扰信号,杂波干扰信号单元数用NC表示.当杂波干扰信号单元数量大于N/2时,测试单元被淹没在杂波信号当中,此时0<k1<N/2,k2=0;而当杂波干扰单元数量小于N/2时,测试单元未被杂信号淹没,此时k1>N/2,k2=0.图3为本文所提出的ACS-CFAR检测器,在N=24、Pfa=10-4、NC=16和Pfc=10-3的杂波边缘干扰仿真环境下与各检测算法检测性能仿真结果对比.从图3可知,SNR=25 dB时,ACS-CFAR检测器检测率为98.53%,检测性能接近于GO-CFAR检测器,优于ACCA-CFAR、VI-CFAR,表现出了在杂波边缘干扰环境下较佳的检测性能.同时对比参考文献仿真结果数据,SNR= 25 dB时,文献[6]中GO-CFAR检测器的检测率为98.97%,文献[5]中CA-CFAR检测器的检测率为95.52%,文献[16]中ACCA-CFAR检测器的检测率为98.26%,文献[19]中VI-CFAR检测器的检测率为98.06%,对比结果也表明本文提出的ACS-CFAR检测器在杂波边缘干扰环境下,检测率大于ACCA-CFAR和VI-CFAR检测器的检测率,小于GO-CFAR检测器的检测率,相差小于0.10%,远大于CA-CFAR检测器的检测率.
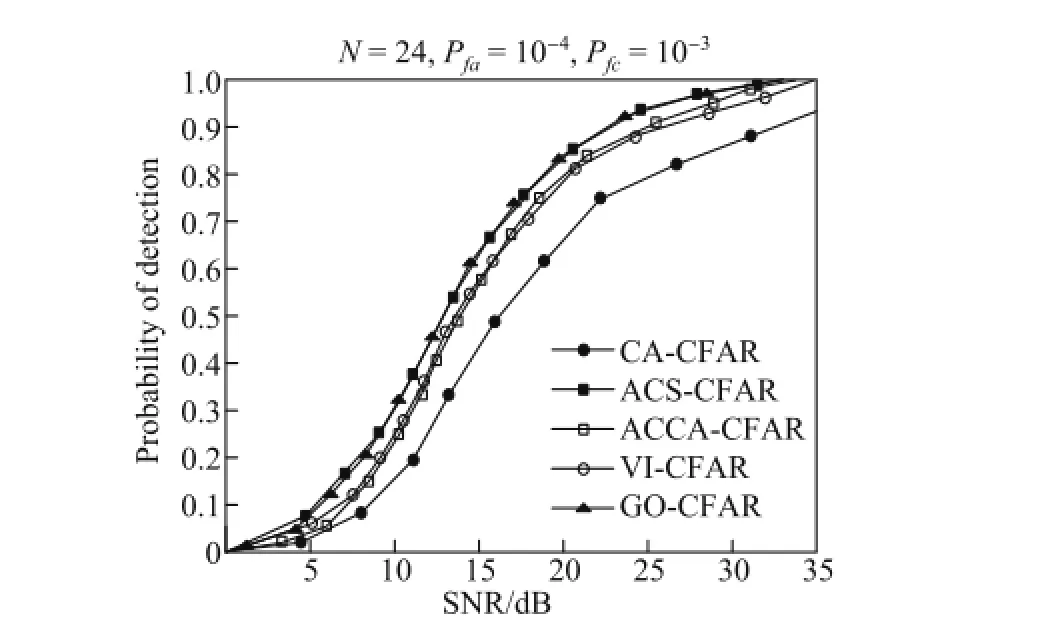
图3 各检测器在杂波干扰环境下的检测率对比Fig.3 PDcomparison of the detectors in clutter edge situation
在杂波边缘干扰环境下,虚警率会随着杂波数量以及在参考窗口中的位置而变化,NC小于2时或者大于20时,ACS-CFAR检测器的虚警率同样接近于目标虚警率,且虚警率均小于ACCA-CFAR和VI-CFAR检测器.仿真结果见图4,从图中可以看出,ACS-CFAR检测器具有较好的恒虚警率控制效果.
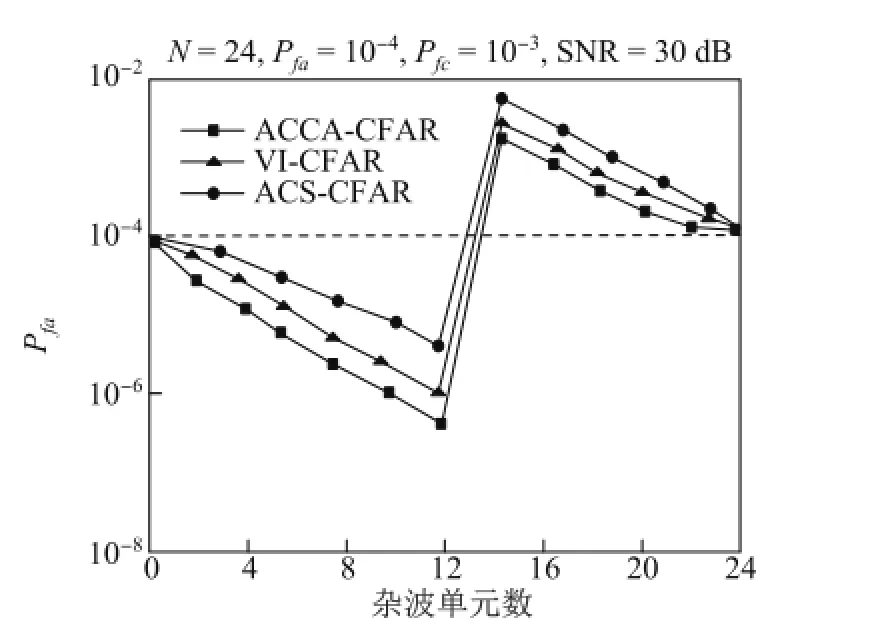
图4 各检测器在杂波干扰环境下的虚警率控制对比Fig.4 Pfacomparison of the detectors in clutter edge situation
2.2.2 多目标干扰环境下性能仿真分析
在模拟的多目标干扰环境下,因为参考窗中含有若干干扰目标信号单元.假设在参考窗口中只包含一种干扰目标信号单元.当目标干扰信号单元数量大于N/2时,测试单元淹没在目标干扰信号当中,此时0<k1<N/2,k2=0;而当干扰目标信号单元数量小于N/2时,测试单元未被干扰目标信号淹没,此时k1>N/2,k2=0.图5为本文提出的ACS-CFAR检测器,在N=24和Pfc=10-3的4个干扰目标仿真环境下剔除能力仿真结果,SNR=30 dB时, ACS-CFAR检测器剔除概率分别为96.82%和97.20%,表现出了较好的干扰目标剔除能力.假设干扰目标数为m,则该算法最大可以删除k1=N-m+1个干扰目标.在实际工程应用中,干扰目标的数量是未知的,检测器的剔除概率有时会有所下降.
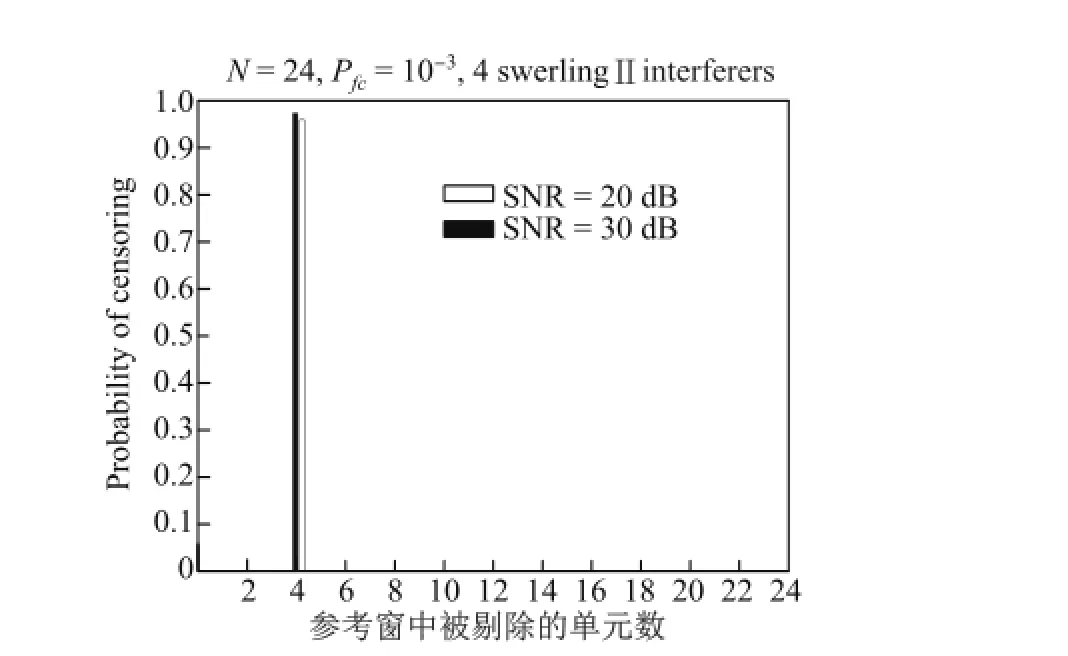
图5ACS-CFAR检测算法在不同信噪比条件下的剔除概率Fig.5 Probability of censoring in multiple target situations for two values of SNR
图6 为干扰目标数m和算法剔除能力之间关系的仿真,从图中看以看出,随着干扰目标数量m的增加,该检测器的剔除能力尤其明显,表现出了较好的实用性和工程应用价值以及对干扰目标极佳的剔除能力.
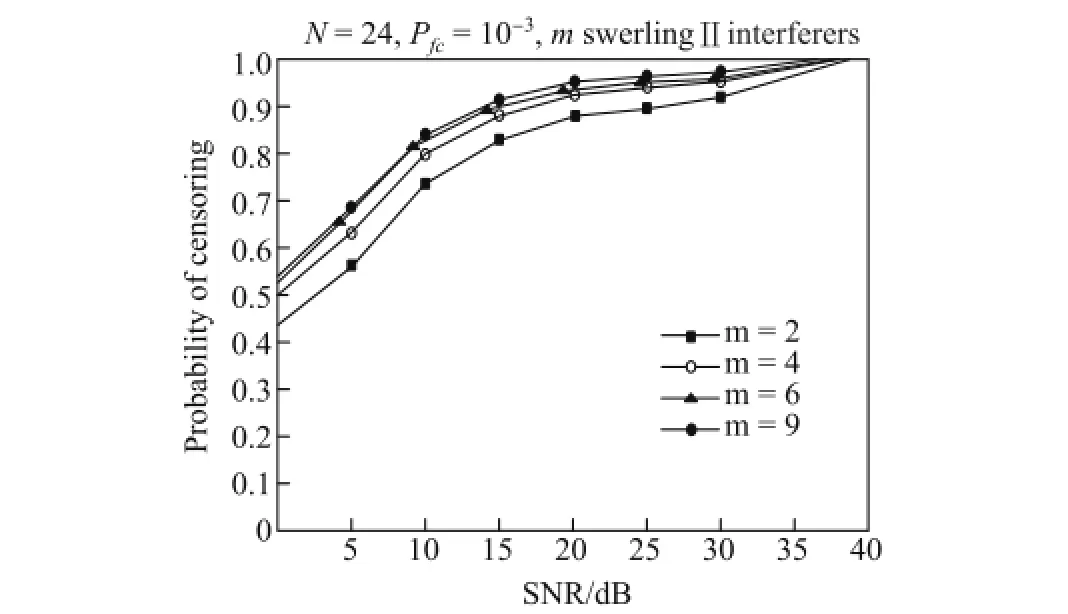
图6 多目标干扰环境下剔除概率与干扰目标数之间的关系Fig.6 Relationship between the Probability of censoring and interfering targets number in multi-interfering targets environment
当ACS-CFAR检测器剔除算法剔除目标概率Pfc减小时,算法的实际剔除概率增加,尤其在干扰目标数m较大时.其仿真结果见图7.
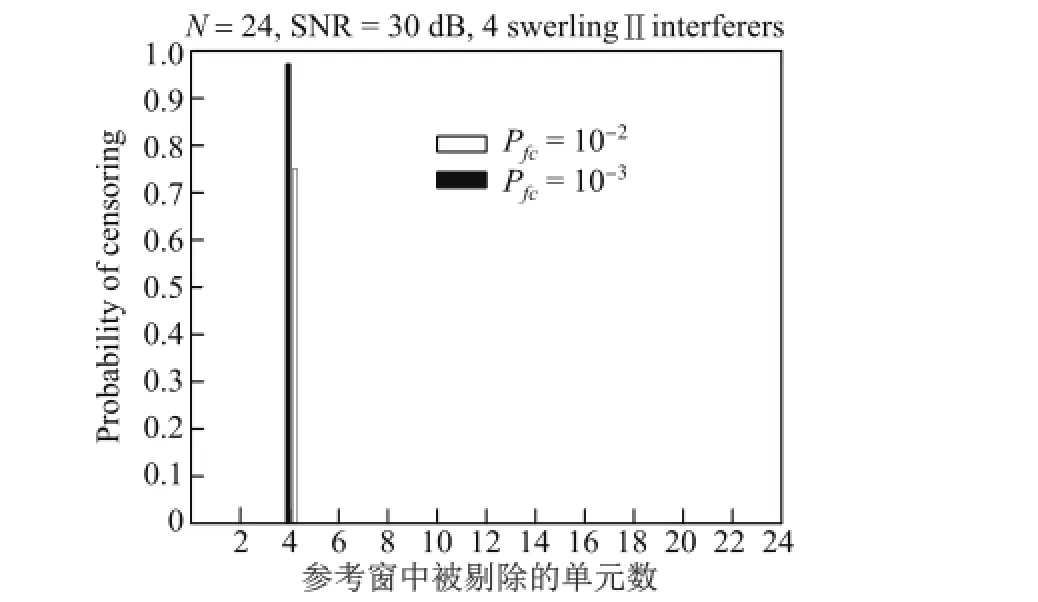
图7 算法在不同目标剔除概率下的剔除概率对比Fig.7Probability of censoring in multiple target situations for two values of Pfa
图8为本文所提出的ACS-CFAR检测器,在N=24、Pfa=10-4、m=4和Pfc= 10-3的多目标干扰仿真环境下与不同检测器的检测性能仿真结果对比.从图8可知,SNR= 25 dB时,ACS-CFAR检测器检测率高达98.43%,检测性能优于ACCA-CFAR和VI-CFAR检测器.同时对比参考文献仿真结果数据,SNR=25 dB时,文献[6]中GO-CFAR检测器的检测率为88.35%,文献[6]中CA-CFAR检测器的检测率为53.67%,文献[16]中ACCA-CFAR检测器的检测率为98.13%,文献[19]中VI-CFAR检测器的检测率为97.95%,对比结果也表明本文提出的ACS-CFAR检测器在多目标干扰环境下,检测率大于ACCA-CFAR和VI-CFAR检测器的检测率.
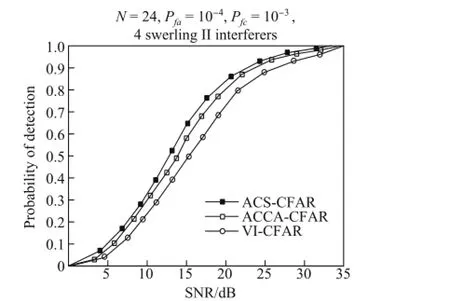
图8 各检测器在多目标干扰环境下的检测概率对比Fig.8 Detection performance comparison between detectors in multi-interfering targets environment
2.2.3 杂波和多目标干扰环境下性能仿真分析
在模拟的杂波和多目标干扰环境下,因为参考窗中既包含目标干扰信号单元,也包含杂波干扰单元,假设在参考窗口中只包含一种干扰目标信号单元和一种杂波信号单元.当目标干扰信号和杂波干扰信号单元的数量均大于N/2时,测试单元淹没在目标干扰信号和杂波信号当中,此时0<k1<N/2,k1<k2≤N/2;当目标干扰信号和杂波干扰信号单元的数量均小于N/2时,测试单元未处于目标干扰信号或者杂波信号当中,此时k1>N/2,k1<k2≤N.
图9为本文所提出的ACS-CFAR检测器在N=24、杂波信号单元数NC=16、干扰目标数m=4和Pfc=10-3的杂波和多目标干扰仿真环境下算法剔除能力仿真结果,当SNR=30 dB,k2=N-m+1=21,k1=N-NC+1=24-16+1=9时,该检测器剔除杂波干扰信号单元和干扰目标信号单元的概率为97.31%和98.430%.
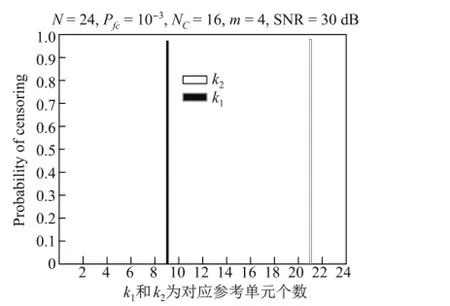
图9 ACS-CFAR算法在杂波和多目标干扰环境下的剔除概率Fig.9 Probability of censoring in clutter edge and multi-interfering target environment
图10和图11为本文所提出的ACS-CFAR检测器在N=24,Pfa=10-4,m=4,NC= 16和Pfc=10-3的多目标干扰和杂波干扰仿真环境下与不同检测器的检测性能仿真结果对比.
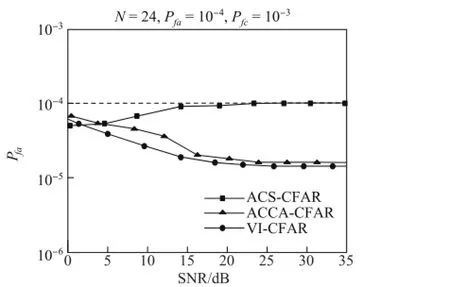
图10 各检测器在多目标和杂波干扰环境下虚警率对比Fig.10 Pfacomparison between detectors in clutter edge and multi-interfering target environment
图10中,干扰目标数量对ACS-CFAR检测器的检测性能影响不明显,而其他几种检测器在多目标干扰和杂波干扰的情况下,虚警率失控,尤其是SNR>10 dB的情况下,虚警率严重偏离设定的目标值,随着SNR的增大,偏离越明显,而本文所提出的ACS-CFAR检测器则仅在SNR<15 dB的情况下有所偏离,SNR>25 dB时,虚警率接近于目标虚警率,表现出了较好的虚警率控制效果.
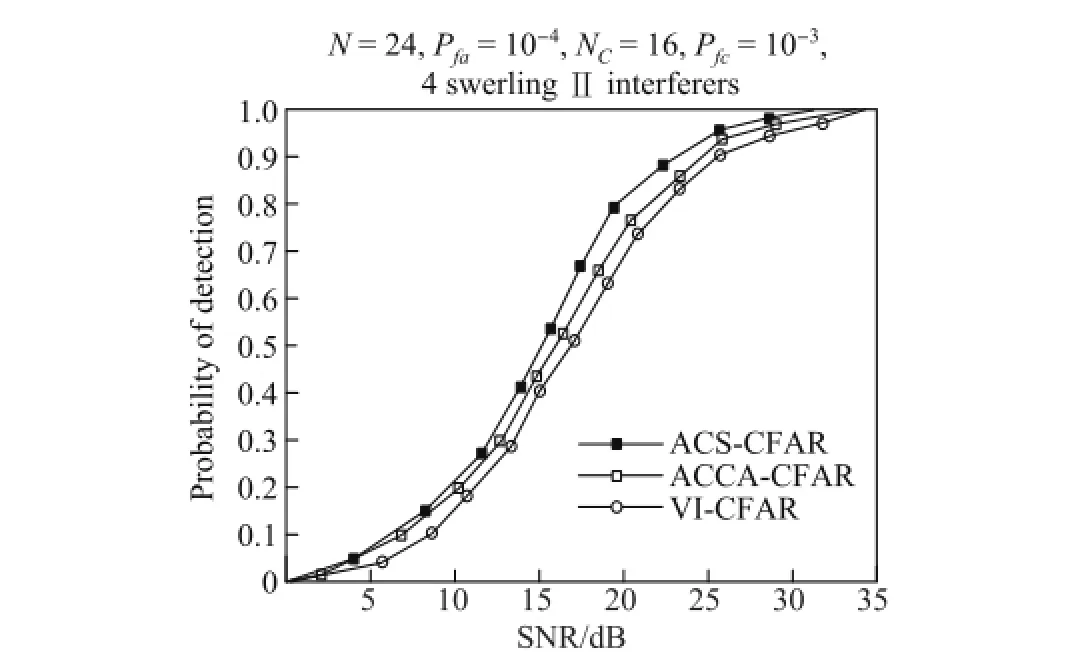
图11 各检测器在多目标和杂波干扰环境下的检测率对比Fig.11 Detection performance comparison between detectors in clutter edge and multi-interfering target environment
图11 中,SNR=25 dB时,ACS-CFAR检测器检测率98.16%,检测性能优于VI-CFAR和ACCA-CFAR检测器.同时对比参考文献仿真结果数据,SNR=25 dB时,文献[16]中ACCACFAR检测器的检测率为97.96%,文献[19]中VI-CFAR检测器的检测率为97.74%,对比结果也表明本文提出的ACS-CFAR检测器在多目标干扰环境下,检测率大于ACCA-CFAR和VI-CFAR检测器的检测率.
3 总结
本文针对在实际工程应用中,非均匀噪声环境下,杂波干扰和多目标干扰信号的数量以及在参考窗口中出现的位置等不确定因素,导致的传统CFAR检测器有时存在虚警过多、检测性能明显下降的问题,提出了ACS-CFAR检测器.通过对参考窗中参考单元按照功率大小升序排列组成有序参考单元序列,让热噪声信号单元、杂波干扰或者目标干扰信号单元以及杂波干扰和多目标干扰信号单元集中有序排列,并进行数量统计,确定两个分界点位置参数,根据这两个参数有效地区分测试单元在参考窗中是处于均匀噪声环境还是非均匀噪声环境,然后从有序参考单元序列集中选择合适的参考单元进行背景噪声功率估计,得到最优的检测门限.在MATLAB环境下,采用蒙特卡洛方法对本文所提出的检测器与CA-CFAR、GO-CFAR、ACCA-CFAR和VI-CFAR其他检测器在模拟的各种环境下进行了仿真和对比分析.仿真结果表明,本文所提出的ACS-CFAR检测器,相对其他检测器均有最优的剔除能力和检测性能,不受杂波和目标干扰单元数量以及在参考窗中所处位置的影响.
[1]章建成,苏涛,吕倩.基于运动参数非搜索高速机动目标检测[J].电子与信息学报,2016(6):1460-1467.
[2]关键,张晓利,简涛,等.分布式目标的子空间双门限GLRT-CFAR检测[J].电子学报,2012,9:1759-1764.
[3]刘红亮,周生华,刘宏伟,等.一种航迹恒虚警的目标检测跟踪一体化算法[J].电子与信息学报,2016(5):1072-1078.
[4]简涛,苏峰,何有,等.复合高斯杂波下距离扩展目标的自适应检测[J].电子学报,2012(5):990-994.
[5]ZAIMBASHI A.An adaptive CA-CFAR detector for interfering targets and clutter-edge situations[J].Digital Signal Processing,2014,31(5):59-68.
[6]ZHANG R L,SHENG W X,MA X F,et al.Constant false alarm rate detector based on the maximal reference cell[J].Digital Signal Processing,2013,23:1974-1988.
[7]SMITH M E,VARSHNEY P K.Intelligent CFAR processor based on data variability[J].IEEE Transactions on Aerospace&Electronic Systems,2000,36(3):837-847.
[8]陈建军,黄孟俊,赵宏钟,等.相参雷达时频域CFAR检测门限获取方法研究[J].电子学报,2013,8:1634-1638.
[9]于洪波,王国宏,曹倩,等.一种高脉冲重复频率雷达微弱目标检测跟踪方法[J].电子与信息学报,2015(5):1097-1103.
[10]SHTARKALEV B,MULGREW B.Multistatic moving target detection in unknown coloured Gaussian interference[J].Signal Processing,2015,115:130-143.
[11]DU B,ZHANG L P.Target detection based on a dynamic subspace[J].Pattern Recognition,2014,47:344-358.
[12]LEI S W,ZHAO Z Q,NIE Z P,et al.Adaptive polarimetric detection method for target inpartially homogeneous background[J].Signal Processing,2015,106:301-311.
[13]WEINBERG G V,KYPRIANOU R.Optimised binary integration with order statistic CFAR in pareto distributed clutter[J].Digital Signal Processing,2015,42:50-60.
[14]HOU H L,PANG C S,GUO H L,et al.Study on high-speed and multi-target detection algorithm based on STFT and FRFT combination[J].Optik,2016,127:713-717.
[15]ZAIMBASHI A,NOROUZI Y.Automatic dual censoring CA-CFAR detector in non-homogenous environments [J].Digital Signal Processing,2008,88:2611-2621.
[16]FARROUKI A,BARKAT M.Automatic censoring CFAR detector based on ordered data variability for nonhomogeneous environments[J].IEEE Proceedings-Radar Sonar and Navigation,2005,152(1):43-51.
[17]BOUDEMAGH N,HAMMOUDI Z.Automatic censoring CFAR detector for heterogeneous environments[J].Int J Electron Commun(AEU),2014,68:1253-1260.
[18]MEZIANI H A,SOLTANI F.Optimum second threshold for the CFAR binary integrator in pearson-distributed clutter[J].Signal,Image and Video Processing,2012,6(2):223-230.
[19]GURAKAN B,CANDAN C,CILOGLU T.CFAR processing with switching exponential smoothers for nonhomogeneous environments[J].Digital Signal Processing,2012,22(3):407-416.
[20]WEINBERG G V.Management of interference in Pareto CFAR processes using adaptive test cell analysis[J]. Signal Processing,2014,104:264-273.
[21]MEZIANI H A,SOLTANI F.Decentralized fuzzy CFAR detectors in homogeneous Pearson clutter background [J].Signal Processing,2011,91(11):2530-2540.
[22]DAVID M M,NEREA D R M,VICTOR M P S,et al.MLP-CFAR for improving coherent radar detectors robustness in variable scenarios[J].Expert Systems with Applications,2015,42:4878-4891.
(责任编辑:李艺)
Automatic censoring switching-CFAR detector based on sorting
LIU Gui-ru1,WANG Lu-lin2,ZOU Shan1
(1.College of Computer and Information Science,Anhui Polytechnic University, Wuhu Anhui241000,China; 2.Prospective Technology Research Institute,Chery Automobile Co.,Ltd, Wuhu Anhui241006,China)
Because the conventional CFAR(Constant False-Alarm Rate)detectors have poor detection performance in non-homogeneous environments,an automatic censoring switching-CFAR detector based on sorting(ACS-CFAR)is proposed.The middle cell of the reference window acts as a cell under test;other cells are sorted into the ranked reference cells by ascending order according to their magnitudes.According to the location parameters of the two boundary points which can ef f ectively discriminate between thermalnoise,clutter edge or interferences plus thermal noise and interferences immersed in the clutter plus thermal noise region,the detection algorithm can ef f ectively select a suitable cell set from the ranked reference cells to estimate the unknown background level. Combined with the number of the selecting reference cells and the desired probability of false alarm,the corresponding scaling factor can be calculated.Finally,the adaptive detection threshold will be obtained according to background noise level estimated value and the calculated scaling factor.The performances of the ACS-CFAR detector is simulated and evaluated in different simulation environments and compared to the performance of the CA-CFAR,VI-CFAR and ACCA-CFAR detectors,the detection probability of ACS-CFAR detector is up to 98.73%,98.16%in homogeneous and non-homogeneous environments,respectively.The ACS-CFAR detector performs like the CA-CFAR detector in homogeneous environments and better than the VI-CFAR and ACCA-CFAR detector in non-homogeneous environments,false alarm rate errors are controlled within±0.10%. The simulation results show that the proposed ACS-CFAR detector has better detection performance in homogenous and the presence of interfering targets and clutter edge environments.
target detection;constant false-alarm rate(CFAR);automatic censoring; Switching-CFAR;non-homogenous noise
TN957.51
A
10.3969/j.issn.1000-5641.2017.03.014
1000-5641(2017)03-0120-13
2016-09-14
国家自然科学基金(91120307);安徽省自然科学基金(TSKJ2015B12);安徽工程大学计算机应用技术重点实验室开放基金(JSJKF201514)
刘贵如,女,硕士,讲师,研究方向为信号处理、车辆主动安全和多传感器融合.
E-mail:liuguiru yunnan@163.com.
