无人机影像构建文物三维模型研究
2017-05-15李国柱喜文飞李菁珊
李国柱,喜文飞,李菁珊
(1.昆明市测绘研究院,云南 昆明 650051;2.云南师范大学 旅游与地理科学学院,云南 昆明 650500;3.云南冶金集团股份有限公司,云南 昆明 650224)
无人机影像构建文物三维模型研究
李国柱1,喜文飞2,李菁珊3
(1.昆明市测绘研究院,云南 昆明 650051;2.云南师范大学 旅游与地理科学学院,云南 昆明 650500;3.云南冶金集团股份有限公司,云南 昆明 650224)
海量点云数据可以很好构建文物的三维建模,常规的建模周期时间长,外业工作量大。利用无人机摄影技术,依据数字摄影测量原理和计算机视觉原理,通过对影像数据进行定向、匹配、空三加密获取点云数据,利用点云数据可以进行三维模型构建,结合实际实验案例进行分析,新方法适合室外文物的三维建模,可达到较好的效果。
点云数据;文物保护;无人机;数字摄影;三维建模
文物是人类智慧的结晶。如何采用新技术在不损伤文物的前提下进行保护,是很多学者研究的一个课题[1]。三维激光扫描技术具有快速获取目标物体表面三维数据的优势[2-5],基于海量的点云数据,可以精确快速重建文物完整的三维数字模型,这对文物保护、文物三维虚拟演示、文物修复等领域的研究具有重大意义[6-7]。由于地面三维激光扫描硬件和软件设备比较贵重,专业性强,而且设站位置有限,不可避免地存在测绘死角,每次只能获取文物的侧面信息,要获得完整的全部信息,手段十分复杂,因此,地面三维激光扫描技术无法广泛应用在文物保护中,而最新的无人机摄影技术就可以弥补该方面的不足。
无人机是一个集多技术并依托于硬件的高科技产物,利用无人机可以全方位的对目标物体进行信息采集,在被测物周围不同角度拍摄一组数字影像,可获取目标物体丰富的纹理信息,适合小范围、低成本、低精度的测量任务[8]。王峰等人采用无人机和三维激光扫描技术进行三维建模[9],王鹤等人采用无人机进行滑坡三维重建[10],柴子为等人利用无人机影像进行景观DEM构建[11],罗寒等人采用影像和三维激光扫描技术进行文物重建[12],无人机技术在各行各业得到了广泛的应用。笔者以云南师范大学校内某处文物为例,利用无人机技术,结合无人机影像处理软件及点云数据的三维构网技术进行三维模型构建。
1 SIFT算法原理
数字摄影测量和计算机视觉技术可以对影像进行模型重建,利用无人机获取影像之后,采用特征点匹配算子进行相片拼接,最后利用重建算法来重构目标物的空间三维信息。文中采用SIFT算子进行影像匹配,首先叙述一下该算法原理。
SIFT算法是David G.Lowe提出的一种基于尺度空间的特征匹配算法,主要是利用高斯差分金字塔模型[13]。高斯金字塔的本质上为信号的多尺度表示法,将同一信号或图片多次的进行高斯模糊,并且向下取样,以产生不同尺度下的多组信号或图片以进行后续的处理。
Koenderink和Lindeberg在基于一系列合理的假设条件下,证明了高斯函数可能是实现图像尺度变换的唯一尺度空间核,可以将一幅图像的尺度空间定义为

式中:*代表x和y的卷积操作,(x,y)是像素点空间坐标,s是像素点尺度坐标,G(x,y,s)是尺度可变高斯核函数,定义为

David G.Lowe提出了使用高斯差分算子来建立图像的高斯差分尺度空间。利用不同尺度的高斯差分核与图像卷积,就可以得到不同尺度的高斯差分图像D(x,y,s),所有的高斯差分图像组成了图像的高斯差分金字塔。

对无人机影像进行相对定向之后,再根据SIFT算子的特征点匹配算法获取大量特征点,然后根据特征点进行自动匹配。
2 实验案例
2.1 无人机获取数据
文中以云南师范大学校园一处文物为例,采用无人机对目标环绕飞行一周进行拍照。
无人机:大疆无人机PHANTOM3;指标为:起飞重量1 280 g,采用GPS/GLONASS双模,像素1 240万,镜头FOV 94°20 mm,f/2.8。
运行环境为:Win7系统,内存4.00 GB,64位操作系统。编程软件为C++,建模软件为Geomagic软件。
拼接软件采用Pix 4D mapper软件,该软件是一款集全自动、快速、专业、精度为一体的无人机数据和航空影像处理软件,可以快速实现点云数据提取。
这次实验构建三维模型的主要思路设计如下:(1)利用无人机获取原始影像数据,获取过程中保持航向重叠度不能低于60%,获取过程中要保持航高一致,外业采集数据光线要均匀;(2)获取的影像数据要进行质量检查,利用软件检查影像是否满足建模的质量需求,如果不满足要进行补飞;(3)采用SIFT算子进行影像匹配;(4)根据空三加密的原则生成点云数据;(5)构建空间三角网;(6)构建三维模型。
其主要操作处理流程如图1所示。

图1 影像数据处理流程
依照上述操作流程,利用无人机获取了文物的照片,原始照片如图2所示,对照片进行了配准对齐、生成密集点云等一系列操作后,生成的点云数据如图3中所示,从图3可以看出,产生了很多杂点,模型重建前必须要进行点云去噪工作,去噪后的点云数据如图4所示。

图2 原始照片

图3 点云数据
图4 去噪的点云数据
2.2 构建空间三角网算法
算法思路:
第一步:离散点云数据的导入,点云数据重心坐标及密度的计算。
第二步:构建第一条基边。以任意一点为起点,设定距离阈值和搜索范围,搜索最近点构建基边。搜索范围的设置:根据点云密度,设置边长为d的正方体空间进行搜索。构建第一个三角形。
第三步:构建完第一个三角形后,开始搜索“第三点”,“第三点”与最近的边可以构成新的三角形,计算前一个三角形与新三角形的法向量夹角,设定阈值为90°(阈值可以根据物体表面的复杂度及点云数据密度来设定),如果小于90°,则符合要求,最后采用最大夹角法来选取最佳点,如果大于90°,则舍弃,继续搜索。
基于以上思想,构建的空间三角网如图5所示,图5为整个文物的三角网模型,从图上可以看出,构建的三角网可以很好的表现文物的细节部分,曲率变化比较明显的地方显示的也非常清晰。?

图5 点云数据空间三角网
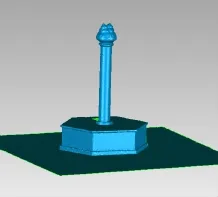
图6 文物三维模型
利用构建的空间三角网对点云数据建立拓扑关系,构建的拓扑关系在Geomagic软件里进行三维模型构建,构建的模型如图6所示。从该三维模型可以看出,模型非常逼真,可以满足文物的精细建模。
3 结语
利用无人机影像进行三维建模,通过将影像转换为点云数据,再利用生成的点云数据结合空间三角网构网手段,可以很好的构建文物的三维模型,与常规的三维激光扫描构建文物相比,该方法成本低、建模速度快,对室外文物可以全方位无死角地构建三维模型,这对于建筑物快速构建三维模型也有很好的借鉴意义。当然,对于室内的文物,无人机摄影技术是不能满足需要的。
[1]王昌翰,向泽君,刘洁.三维激光扫描技术在文物三维重建中的应用研究[J].城市勘测,2010(6):67-70.
[2]张宏伟,赖百炼.三维激光扫描技术特点及其应用前景[J].测绘通报,2012(S1):320-322.
[3]尹玉廷.地面3维激光扫描技术在古建筑保护中的应用研究[J].测绘与空间地理信息,2013,36(2):91-93.
[4]田宗建.3维激光扫描技术在测量中的应用[J].测绘与空间地理信息,2012,35(7):124-125.
[5]白成军,吴葱.文物建筑测绘中三维激光扫描技术的核心问题研究[J].测绘通报,2012(1):36-38.
[6]吴玉涵,周明全.三维扫描技术在文物保护中的应用[J].计算机技术与发展,2009,19(9):173-176.
[7]喜文飞,李国柱.一种新的点云数据压缩质量评定方法[J].甘肃科学学报,2013,25(3):73-75.
[8]李隆方,张著豪,邓晓丽,等.基于无人机影像的三维模型构建技术[J].测绘工程,2013,22(4):85-89.
[9]王峰,宋杨,高志国,等.UAV航测和TLS技术在广钢遗址测绘建模中的应用[J].测绘通报,2016(4):72-74.
[10]王鹤,刘军,王秋玲.利用无人机影像进行滑坡地形三维重建[J].测绘与空间地理信息,2015,38(12):68-71.
[11]柴子为,康峻,王力,等.基于无人机影像的山地人工林景观DEM构建[J].遥感技术与应用,2015,30(3):504-508.
[12]罗寒,王建强,张飞,等.两种建模方法在古文物三维模型重建中的研究[J].工程勘察,2016,44(2):41-44.
[13]LOWE D G.Distinctive image features from scale-invariant key points[J].International Journal of Computer Vision,2004,60(2):91-110.
3D modeling of the cultural relics with UAV photography
LI Guozhu1,XI Wenfei2,LI Jingshan3
(1.Kunming Institute of Surveying and Mapping,Kunming 650051,China;2.College of Tourism and Geographic Sciences,Yunnan Normal University,Kunming 650050,China;3.Yunnan Metallurgical Group Co.,Ltd.,Kunming 650224,China)
The 3D modeling of the cultural relics can be done with the massive data of point cloud.The traditional modeling of cultural relics was longer,and the technical difficulty was greater.With the UAV photography based on the principles of digital photogrammetry and those of computer vision,we obtained point cloud data by directing,matching,empty three encrypting the image data.Then the 3D modeling was constructed with those point cloud data.The experimental results show this method is suitable for the outdoor 3D modeling of cultural relics and can achieve a good effect.
point cloud data;cultural relic protection;unmanned aerial vehicle;digital photography;3D modeling
责任编辑:谢金春
P208
:A
:2096-3289(2017)02-0063-04
2016-10-20
国家自然科学基金资助项目(41361042);云南省教育厅研究基金资助项目(2016ZZX067)
李国柱(1973-),男,云南昆明人,正高级工程师,硕士,研究方向:测绘生产管理。
